一种新型三维精密工作台的设计与应用
2012-06-01 03:22陈育荣王生怀
自动化仪表 2012年8期
黎 新 陈育荣 王生怀
(湖北汽车工业学院机械工程系,湖北 十堰 442002)
0 引言
随着精密加工及测试技术的迅速发展,精密定位的问题变得至关重要[1-2]。为更深入地研究物体表面形貌的特性与功能,对形貌的测量评定已由二维发展到三维,尺度也由微米发展到纳米,测量范围由小面积向大面积发展[3]。此外,微加工、微操作、微存储也希望有尽可能大的工作范围,以提高装备的功能与效率。因此,研究大量程精密定位工作台已成为各前沿学科的当务之急。
本文所设计的精密三维位移工作台可广泛应用于三维表面形貌的测量与评定、精密及超精密加工和半导体光刻等领域。与传统的二维及三维工作台相比,该精密三维位移工作台具有高精度和大量程等优点。它采用粗、精结合的定位机构和自带计量系统的闭环控制系统,能够实现垂直方向(Z方向)的大量程位移扫描和水平方向(X-Y方向)的精确定位。
1 工作台的结构及原理
自带计量系统的三维位移工作台结构如图1所示。
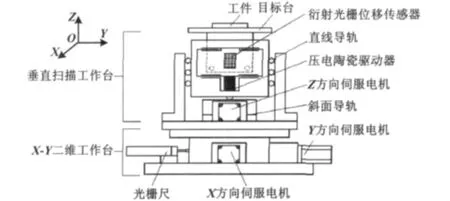
图1 三维位移工作台结构Fig.1 Structure of the 3D displacement workbench
由图1可知,工作台由垂直扫描工作台和X-Y二维工作台组成,其中,垂直扫描工作台被放置在X-Y二维工作台之上。当测量工件时,闭环控制系统控制二维工作台的位移;同时,Z方向由伺服电机和压电陶瓷驱动器驱动垂直扫描工作台,以实现垂直方向上的精确定位。衍射光栅位移传感器用于探测垂直扫描工作台的垂直位移量。因此,在表面形貌测量过程中,实现了X-Y方向的精度定位和Z方向的垂直扫描。
1.1 垂直扫描工作台原理
垂直扫描工作台结构如图2所示。
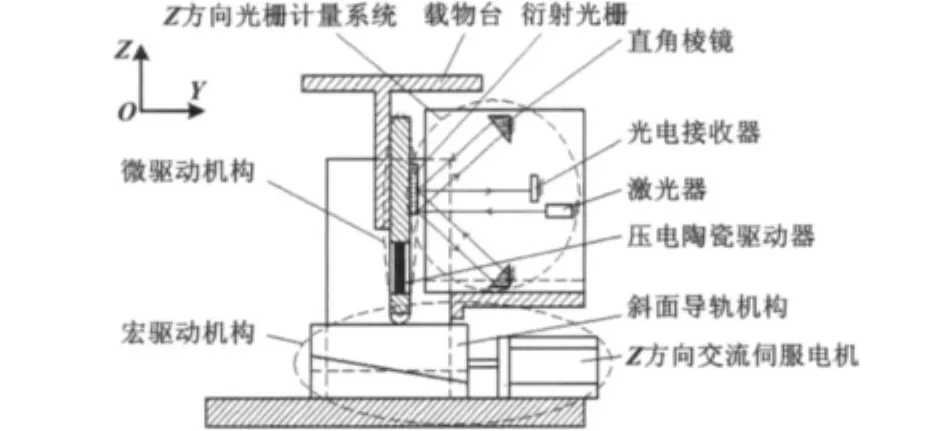
图2 垂直扫描工作台结构Fig.2 Structure of the vertical scanning workbench
由图2可知,计量型垂直扫描工作台分为粗、精两级驱动。精驱动由压电陶瓷驱动器执行,粗驱动由Z方向伺服电机和斜面导轨机构组成。粗、精两级驱动机构之间安装有精密滚动轴承,粗驱动机构能推动精驱动机构沿直线导轨在垂直方向上运动。精、粗驱动机构的组合位移量由Z方向的衍射光栅计量系统进行计量[4-5]。定位时,首先由驱动电机进行粗定位驱动,然后再驱动压电陶瓷按一定的算法进行精确定位。
斜面导轨的斜度为1∶10,升程为10 mm;丝杠螺距为1 mm;伺服电机的输出为10000脉冲/转,所以垂直位移为10 nm/步。粗、精驱动的位移量均由计量衍射光栅测量系统计量。衍射光栅测量系统光学原理图如图3所示。

图3 衍射光栅测量系统光学原理图Fig.3 Optical principle of the diffraction grating measurement system
由图3可知,激光器发出的光入射到反射光栅,经反射光栅一次衍射后形成+1级和-1级两束衍射光,再通过置于两侧的直角棱镜将+1级和-1级衍射光反射回光栅并汇聚于光栅上另一点;经过二次衍射后,(+1,+1)级和(-1,-1)级两束衍射光将在垂直于X轴放置的光电探测器上形成干涉条纹。当光栅移动时,干涉条纹将发生相移,通过探测条纹的变化即可反映出物体的位移。衍射光栅测量系统采用1200线/mm的计量衍射光栅,经两次衍射以及对信号的20细分,可达5 nm的分辨率。
1.2 X-Y二维工作台
X-Y二维工作台的控制系统如图4所示。
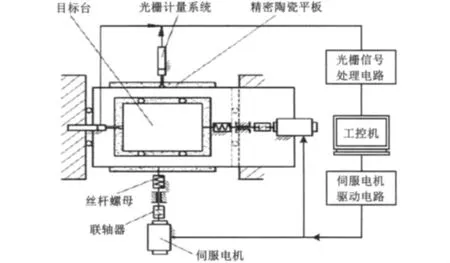
图4 X-Y二维工作台控制系统Fig.4 Control system of the X-Y 2D workbench
由图4可知,X-Y二维工作台的控制系统由目标台、精密陶瓷平板、伺服电机、衍射光栅位移传感器、控制电路和计算机组成[6-7]。在X-Y工作台的X方向,伺服电机通过联轴节带动丝杠旋转,驱动工作台移动;同时,在工作台的另一端,计量光栅接收目标台的位移信号,由电路对计量光栅的输出信号进行细分、辨向和计数处理。在软件中计算出工作台的实际位移后,将实际位移与目标位移量进行比较,采用二者之间的差值去控制步进电机的精确定位。在X-Y工作台中,Y方向的驱动也与此相同。工作台采用共运动基面设计,承载工件的工作台在发生X、Y向移动时,始终贴着陶瓷精密平板上表面运动,使运动平面有较高的精度。控制系统所采用的光栅尺(光栅测微传感器)的测量范围为0~50 mm,栅距为20 nm,其4倍频脉冲分辨率为 5 μm。
1.3 光栅信号处理电路
光栅信号处理电路示意图如图5所示。
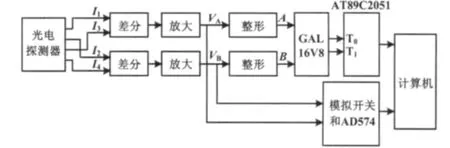
图5 光栅信号处理电路示意图Fig.5 Schematic diagram of the grating signal processing circuit
垂直扫描工作台采用衍射光栅位移传感器,二维工作台采用计量光栅位移传感器,其都基于莫尔光栅条纹原理。因此,其信号处理线路是相似的。
差分信号I1、I2与I3、I4由光电管探测器产生,经过前置放大和整形处理后变为两路相差为90°的双向正交方波信号A和B。一个周期方波信号对应干涉条纹交替变化一次,对方波进行计数,可实现对位置的测量。对方波进行倍频细分,可提高测量的分辨率。由于工作台可以在正、反两个方向移动,所以在进行计数和细分电路设计时,要综合考虑辨向的问题。本系统所采用的四细分辨向电路中,输入信号为具有90°相位差的两路方波信号,这两路信号在一个周期内具有两个上升沿和两个下降沿,通过对边沿的处理实现四细分。辨向是根据两路方波相位的相对超前和滞后的关系作为判别依据。采用GAL16V8四细分后的分辨率为250 nm,但干涉条纹最后一个移动信号往往不足1/4个周期,故利用12位A/D芯片AD574进行转换,再由计算机处理转换的信号并计算获得干涉条纹信号的瞬时相位θ。根据计数值N和瞬时相位角θ,即可得到工作台的垂直位移为
2 工作台的应用及试验结果
课题组已成功将该精密三维位移工作台应用于三维表面形貌的测量与评定中,取得了良好的测量效果。传统的轮廓仪存在测量精度及量程有限等缺点,而使用精密三维位移工作台的三维表面形貌测量仪,在测量量程增大时仍能获得较高的测量精度,并有效地减小了测量力[9-10]。
采用接触式测头和非接触式测头,分别对中国计量科学院检定的标准表面粗糙度多刻线样板进行测量,三种不同样板的测量数据结果如表1所示。
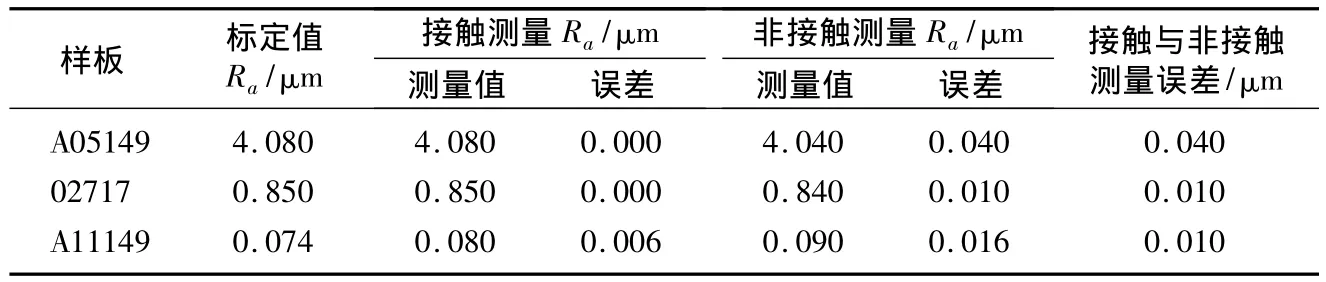
表1 不同样板测量数据Tab.1 Measurement data of different models
对于样板A05149仪器精度,测试其中一次的粗糙度曲线及评定结果分别如图6和表2所示。

图6 样板A05149的粗糙度曲线Fig.6 Roughness curve of model A05149

表2 样板A05149粗糙度评定结果Tab.2 Evaluation results of model A05149 roughness
其中,样板的标准值为Ra=4.08 μm,测得值的相对误差为0.19%。在同一位置反复测量5次后的结果表明,其示值误差范围为2%、示值变动性<2%。此外,用仪器对各种铜、铝、钢工件的表面进行了测量,均取得了满意的结果。
3 结束语
基于垂直扫描的三维精密工作台由一个自带计量系统的二维工作台和垂直扫描工作台组成,具有高精度和大量程等优点。垂直扫描工作台采用伺服电机和压电陶瓷驱动器来实现精确定位,目标台和衍射光栅连接,衍射光栅放置在工作台的下方记录位移;对于二维工作台,目标台和陶瓷精密平板紧紧相连,以确保运动平稳性。自带计量系统的三维精密工作台可应用于经过改进的接触/非接触三维表面形貌测量仪。
[1]Holmes M,Hocken R,Trumper D.The long range scanning stage:a novel platform for scanned probe microscopy[J].Precision Engineering,2000,24(3):191 -209.
[2]Holmes M L,Trumper D.Magnetic fluid bearing stage for atomic scale motion control[J].Precision Engineering,1996,18(1):38 -49.
[3]Dong W P,Sullivan P J,Stout K J.Comprehensive study of parameters for characterization 3-dimensional surface topography[J].Wear,1992,159(2):161-171.
[4]Wang Xuanze,Dong Xiaohua,Guo Jun,et al.Two-dimensional displacement sensing using a cross diffraction grating scheme[J].Journal of Optics A:Pure and Applied Optics,2004,6(1):106 -111.
[5]Vilkomerson D,Lyons D,Chilipka T,et al.Diffraction-grating transducers[C]∥1997 IEEE Ultrasonics Symposium,1997:1691 -1694.
[6]廖艳春,谢铁邦.一种计量型二维精密工作台的研究[J].湖北工业大学学报,2005,20(5):122 -124.
[7]Wang Xuanze,Guo Jun,Xie Tiebang.Study of 2D displacement platformwith measurement standard instrument[J].Journal of Huazhong University of Science and Technology,2003,31(11):53 -54.
[8]Wang Z,Bryanston-Cross P J,Whitehouse D J.Phase difference determination by fringe pattern matching[J].Optics & Laser Technology,1996,28(6):417 -422.
[9]Groot P D E,Deck L.Surface profiling by analysis of white-light interferograms in the spatial freqency domain[J].Journal of Modern Optics,1995,42(2):389 -401.
[10]Chim S S C,Kino G S.Three-dimensional image realization in interference microscopy[J].Applied Optics,1992,31(14):2550 -2553.
猜你喜欢
微特电机(2020年11期)2020-12-30
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27
北方交通(2016年12期)2017-01-15