感应电机低速控制方法
2012-07-02 03:25徐英雷
电力系统及其自动化学报 2012年2期
王 涛,徐英雷
(西南交通大学电气工程学院,成都610031)
感应电机由于其变量非线性耦合,转子电量难以测量,同时电机参数时变性导致感应电机高精度交流调速控制相当复杂[1],尤其是在电机低速运行时,条件更为苛刻。为了获得优良的调速动静态性能,控制问题一直是研究的热点。速度控制是感应电机驱动系统的核心,速度测量需要在电机轴上安装速度传感器,可实现对速度控制和转矩控制。然而,速度估计优越于速度测量,间接磁场定向无速度传感器技术广泛应用在感应电机驱动上,虽然无速度传感器技术在电机高速具有很好的性能,但是它在低速时性能变得很差。然而,带有磁通观测器的直接磁场定向控制方法,这是因为磁通估计器在低速时,此时磁通估计的极点,在其S域的原点附近。同时,磁通观测器使用纯积分器,由于积分器漂移和初始条件,导致对电压传感器和电机定子电阻变化非常敏感,不能很好地应用于实际。并且,感应电机无速度传感器矢量控制中,速度辨识系统在零频或极低速时会不稳定,是由于其反电动式很低,定子电阻变化或者测量误差,低速运行相当苛刻;同时,由于缺失了电机转子侧的信息,电机转子参数不匹配引起的扰动导致的结果。零频时,此时信号激励为零,电机转子速度与转子磁通不能使用传统的观测器,因为此时只存在单一输入,在理论上不能解决零速问题[2,3]。
为了在零频时不用速度测量,而控制感应电机,则需消除输入的单一性。一些速度估计算法,比如高频电压信号注入或者正弦PWM电压波,来估计零频时的转子速度,这些方法将电压作为通用输入,是有效的。许多的速度估计方法应用于感应电机矢量控制,其中MARS由于其简单直接的稳定算法,成为了流行的方法。比如磁链、反电动和无功都是基于MRAS函数的方法。
本文在传统观测器中引入V信号,解决低速激励信号不足,使得系统稳定收敛,且能很好地辨识电机转子速度。
1 感应电机数学模型
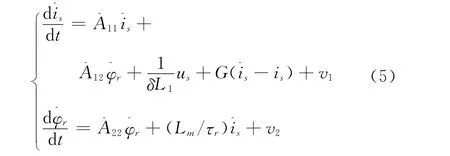
根据电机学理论,感应电机在两相静止α-β坐标系下,状态方程为[5]

其中:

式中:R1、R2为定转子电阻;L1、L2为定转子自感;Lm为互感;δ为漏磁系数;δ=1-/L1L2;τr为时间常数;ωr为电机角速度。
由式(1)可以得
2 观测器的设计
定义上标符号“^”为观测值,传统降阶观测器方程为
其中,G为观测器增益矩阵,即
使误差响应的快速性与外界干扰及测量噪声达到一种折中,配置观测器增益矩阵G的极点,使观测器的特征值为负,这样观测状态量会收敛于待观测系统的状态值。观测器的特征值某种程度上更负于待观测系统的特征值,从而比其它系统收敛的速度更快。基于上述考虑,选择如下:

因为在低速和零频时,此时磁通估计的极点,其在S域的原点附近,导致对电压传感器和电机定子电阻变化非常敏感。为此在上式观测器中引入V信号,解决低速激励信号和系统稳定收敛、辨识转子速度。其中:V = [v1v2]′,v1和v2是要设计的感应电机输入量,即为添加的激励信号。
由此观测器的结构[6],用下式表示:
观测器结构如图1所示。

图1 观测器结构Fig.1 Structure of observer
由式(5)减去式(2),有:
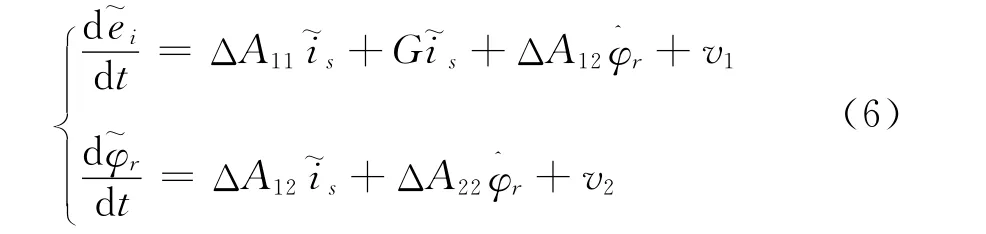
设定Lyapunov函数为
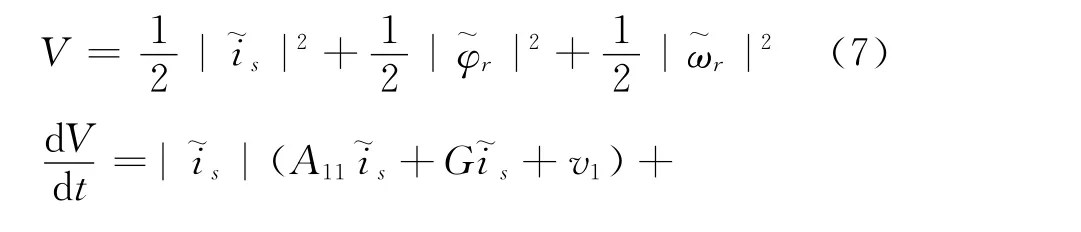
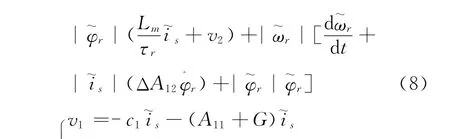

综上有

根据Lyapunov稳定性定理,由式(9)可以看出观测电流值会趋近实际电流值;转子转速跟随实际值,可以在线辨识转子速度;同时转子磁链渐近跟踪参考磁链,能够保证设计方法的性能稳定性和快速收敛性。
3 仿真算例结果
对一台鼠笼式感应电机,其参数:额定功率PN=35kW,额定电压UN=380V,额定频率fN=50Hz,定子电阻Rs=0.4Ω,转子电阻Rr=0.5 Ω,Ls=0.087H,互感Lm=0.085H,Lr=0.088 H,极对数np=2,J =0.0876kg·m2,利用Matlab/simulink进行仿真[7]。仿真结果如图2和图3所示。
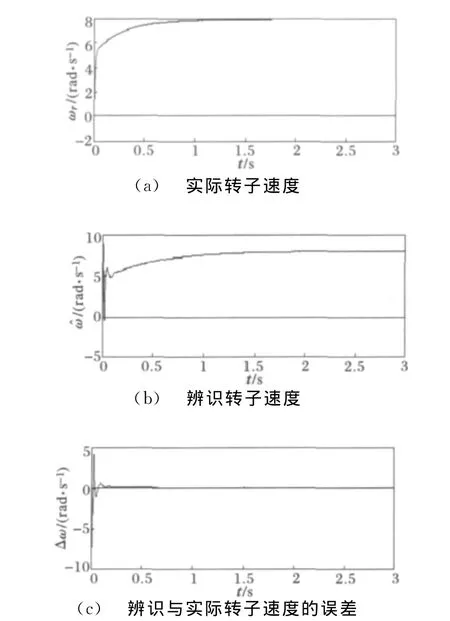
图2 低速段的速度估计Fig.2 Speed estimation at very low-speed subsection
设定感应电机负载转矩为一定值,其大小为15N·m。参考模型是有速度传感器的闭环系统,转子速度自适应系统为无速度传感器系统,其转速跟踪参考模型输出值。仿真时电机的实际转速指参考模型的输出值。
设定转子转速参考值ω*r=8rad/s,电机实际转速如仿真图2(a)所示,辨识转子转速如仿真图2(b)所示,电机转速与辨识转速的误差,如仿真图2(c)所示,实际转速很快能够收敛于转速参考值,感应电机启动时,辨识转速与实际转速之间有一个较大的波动误差,产生原因为参考模型系统的转子转速值,在启动瞬间有突变,导致自适应模型系统的转子速度有剧烈的波动,但是0.2s后,辨识转速能很快的趋近实际转速。
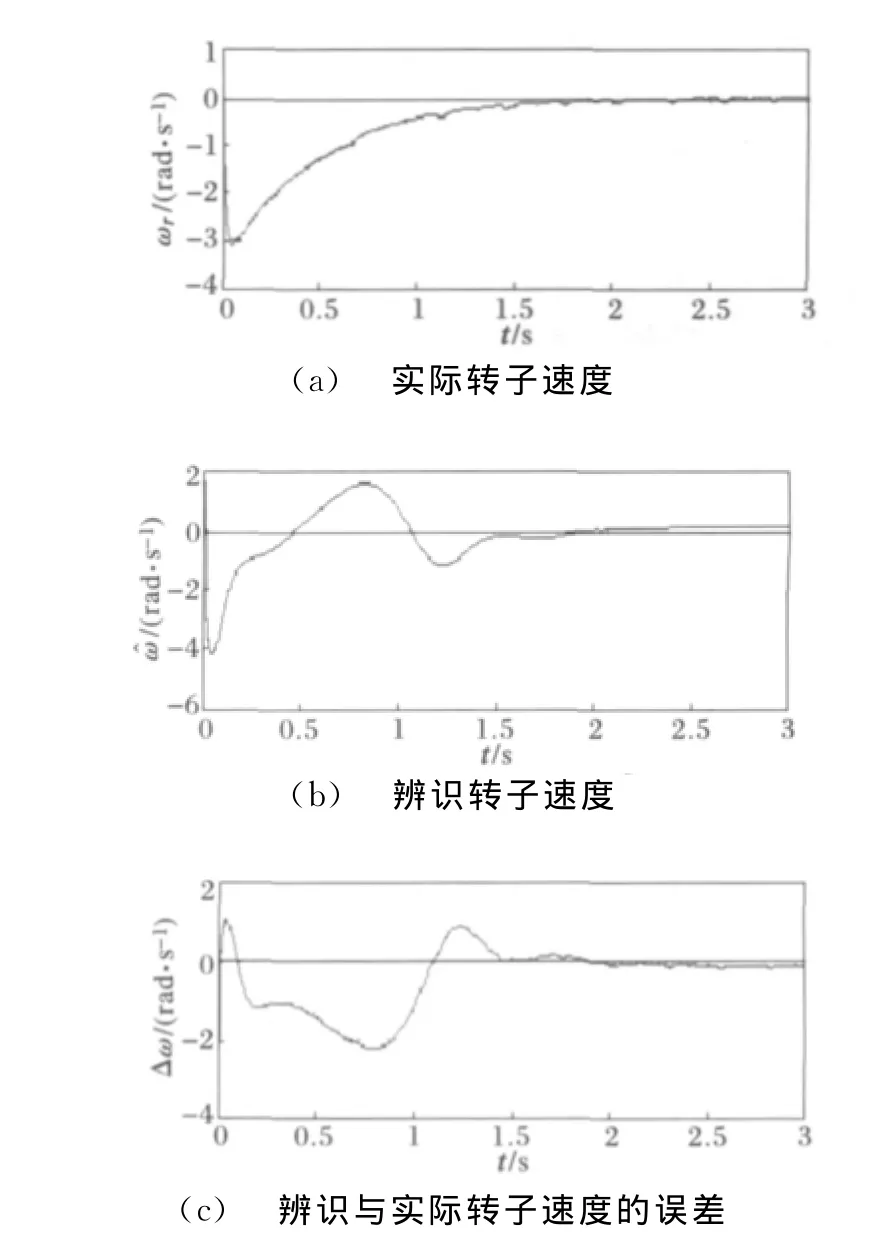
图3 零频时的速度估计Fig.3 Speed estimation at zero-frequency
仿真结果显示感应电机在低速或零速时转子转速能观测,系统有良好的调速性能和稳定性能。
4 结语
基于模型参考自适应方法,在其观测器中引入V信号,采用非线性Lyapunov理论分析和证明了电机的电磁子系统的收敛性,给出交流调速系统的一种具有鲁棒性的自适应控制律,解决低速激励信号不足,达到系统稳定收敛,辨识转子速度,克服了一般矢量控制中在低速段时磁链观测不准的缺点。理论证明该控制方案保证转子磁链、转速都能全局稳定跟踪,同时仿真结果表明系统具有良好的动静态性能,控制系统结构简明,易于实现。
[1] 李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[2] Wang Huangang,Zhang Xiaoping,Xu Wenli,et al.The speed-sensorless control of induction motors at zero frequency[C]∥Fifth International Conference on Electrical Machines and Systems,Shenyang,China:2001.
[3] Yamaguchi N,Hasegawa M,Doki S,et al.A stabilization method for speed sensorless vector controlled induction motors at zero frequency operating condition with multirate adaptive observer[C]∥30th An-nual Conference of IEEE Industrial Electronics Society,Busan,South Korea:2004.
[4] Kubota H,Matsuse K,Nakano T.DSP-based speed adaptive flux observer of induction motor[J].IEEE Trans on Industry Applications,1993,29(2):344-348.
[5] Madadi Kojabadi H,Chang L.Model reference adaptive system pseudoreduced-order flux observer for very low speed and zero speed estimation in sensorless induction motor drives[C]∥33rd Annual IEEE Power Electronics Specialists Conference,Cairns,Australia:2002.
[6] 肖建.现代控制系统综合与设计[M].北京:中国铁道出版社,2000.
[7] 顾德英,季正东,张平(Gu Deying,Ji Zhengdong,Zhang Ping).基于SIMULINK的异步电机的建模与仿真(Modeling and simulation of asynchronous motors based on SIMULINK)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2003,15(2):71-73.
猜你喜欢
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
防爆电机(2020年4期)2020-12-14
中学生数理化·中考版(2020年10期)2020-11-27
中学生数理化·中考版(2018年11期)2019-01-31
传感器与微系统(2018年7期)2018-08-29
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年5期)2016-03-22
铁道科学与工程学报(2015年5期)2015-12-24
电测与仪表(2015年3期)2015-04-09