
一种DC-DC变换器的控制策略及仿真分析
2012-07-04 02:45徐百汇闻琦史振宇
船电技术 2012年8期
徐百汇 闻琦 史振宇
(1. 海军东海舰队装备部,浙江宁波 315122; 2. 中国人民解放军92730部队装备部,海南三亚572016;3. 海军驻438厂军事代表室,武汉430064)
0 引言
PWM 变换器本质上属于时变的、强非线性系统,其精确模型较难建立,基于线性反馈控制的变换器在动态响应和鲁棒性上很难取得满意的控制效果[1]。近年来,国内外学者将一些非线性控制方法引入 PWM 变换器中,如滑膜控制[2],单周控制[3]等。模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,具有算法简单、易于软件实现、鲁棒性强和适应性好等特点并且可以很好的解决被控对象参数的不确定问题。此外,模糊控制能够处理时变、非线性、精确模型难以确立的系统[4,5],已被广泛地应用于DC-DC变换器中。
PID控制是严格基于对象的数字模型,它可确保系统的稳定性、可靠性等。PID控制理论是一种较为成熟的理论。已广泛用于工业控制和自动化领域。然而,对于非线性系统,PID控制并不太适合。因此.对DC-DC变换器这种强非线性系统,简单的PID控制越来越难以满足其不断提高的性能指标要求。提出了一种混合模糊PID控制。而通过模糊控制对传统PID控制器进行增益调节:通过对DC/DC变换器建立近似线性小信号模型得到优化的PID参数,以达到闭环控制系统的性能要求。
1 模糊控制原理
模糊控制[6]的概念首先是由加利福尼亚大学著名教授L.A.Zadeh首先提出的。它是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,他是从行为上模仿人的模糊推理和决策过程的一种智能控制方法。该方法首先将操作人员或专家经验编成模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。

图1 模糊控制的基本原理框图
如图1所示,它的核心部分为模糊控制器[7],图中线框部分的控制规律由计算机程序实现。其实现模糊控制算法的过程描述如下:微机经中断采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E,一般选误差信号E作为模糊控制器的一个输入量,把误差信号E的精确量进行模糊化变成模糊量。误差E的模糊量可用相应的模糊语言表示,得到误差E的模糊语言集合的一个子集是一个模糊矢量),再由和模糊控制规则(模糊算子)根据推理的合成规则进行模糊决策,得到模糊控制量
2 SEPIC变换器的小信号模型及传递函数的确定


3 SEPIC变换器模糊自适应 PID控制器参数整定算法研究
3.1 模糊自适应PID控制器参数整定原理
模糊自适应 PID控制就是运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况,运用模糊推理,既可自动实现对PID参数的最佳调整。在国内外,已经有很多学者将模糊自适应PID控制应用于直流变换器上,无论理论上的分析和研究,还是实践上的应用与实现,都得到了良好的效果[9-12]。
模糊自适应PID控制器的结构如图2所示,其中rin为系统输入,yout为系统输出,error为系统输入与输出的差,ec为误差的变化率。

图2 模糊自适应PID控制器的结构
设PID控制器的输出量为u(t),输入量为e(t),它们的关系为:

式中:KP为比例增益,KI为积分增益,KD为微分增益。模糊自适应参数整定就是寻求该三个参数与e、ec之间的关系。整个系统在运行中不断检测e和ec,然后根据一定的原理对PID的三个参数进行修改,以满足不同e和ec对控制参数的不同要求,从而使被控对象有良好的性能。
3.2 模糊自适应PID控制器参数整定算法
通过多次操作的经验总结或多次操作的数据处理,结合理论分析可以归纳出偏差 e、偏差变化率ec跟PID调节器的三个参数KP、KI、KD间,存在如下关系。
基于以上总结出的输入变量 e与三个参数间的定性关系,结合工程技术人员的分析和实际操作经验,考虑偏差变化率的影响,建立合适的模糊控制表,就是调节修正PID调节器三个参数的模糊规则。
将系统误差 e和误差变化率 ec变化范围定义模糊集上的论域,

其模糊子集为:

设 e,ec和 KP,KI,KD均服从正态分布,因此可导出各模糊子集的隶属度,根据各子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代入下式计算:

在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正,其工作流程如图3所示。
经仿真可得,系统的Bode图为图4所示[6,9]。
对于一个稳定的电压可调系统,其增益裕量应大于6 dB,相角裕量应大于45°[13],而该系统的相角稳定裕量仅为y=2.236°。因此,可以采用PID控制器来提高系统的稳定性,其传递函数为:

令 KP=1,KI=0.001,KD=0.03,补偿后的相角裕量约为89°,增加了系统的稳定性。
但对DC/DC变换器这种强非线性系统,单一PID调节往往不能满足系统性能的要求,因此采用模糊自适应PID控制器。下面对模糊自适应PID控制器与单一PID控制器对系统的输出进行MATLAB仿真比较。
由图5所示,系统在无任何控制时,输出时会产生较大的振荡,应用PID控制可以较好的解决上述问题,但是输出达到稳态的时间较长。而采用模糊自适应PID控制,可以使系统尽快进入稳定工作状态,具有良好的工程实践意义。
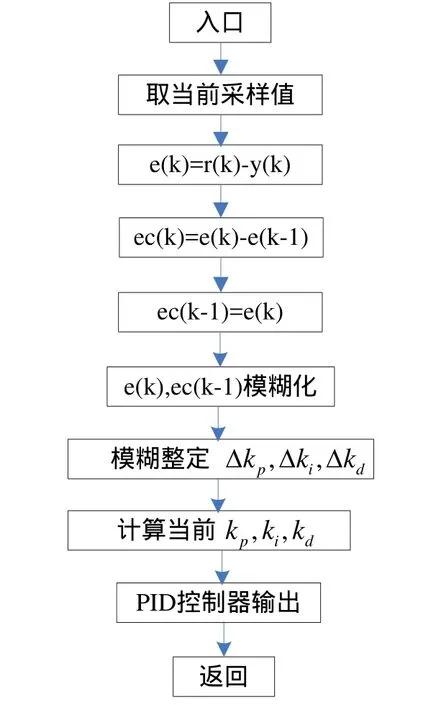
图3 工作流程图

图4 系统Bode图

图5 控制方式不同时,系统启动的输出波形
4 结论
针对宽幅压工况下的输入电压扰动以及SEPIC电路自身的强非线性特点,本章尝试性地将模糊自适应PID控制运用到SEPIC变换器上,经过仿真,得到了理想的效果。该控制策略具有如下特点:
(1)模糊自适应 PID控制以 PID控制为核心,可以对系统的传递函数进行补偿,有助于降低系统输出纹波、变换器启动时的输出冲击,优化各元件参数以及提高变换器的稳定性。
(2)模糊自适应 PID控制在 PID控制的基础上,根据误差的改变,对PID控制器的三个参数进行实时调节,增强了系统的快速调整性、鲁棒性和可靠性,为变换器稳定工作奠定了基础。
[1]宋受俊, 刘景林, 张智慧. BUCK变换器建模及其先进控制方法仿真[J]. 计算机仿真, 2006, 21(3):294-300.
[2]Venkataramanan R, Sabanovic A, Cuk S. Sliding mode control of DC-to-DC converter[C]. Industrial Electronics Society,Montreal,Que,Canada: IEEE,1985,2: 251-258.
[3]Smedly K M, Slobodan C. One-cycle control of switching converters[J]. IEEE Transation on Power Electron Vonics, 1995, 10(6): 625-633.
[4]张化光, 路文赜. 基于电流模式的Buck变换器的模糊控制[J]. 控制工程, 2009, 16(4): 472-474, 501.
[5]郭唐仕, 尹华杰. Buck变换器的数字模糊PID控制[J]. 电源技术应用, 2002, 5(5): 181-184.
[6]刘金琨. 先进PID控制的MATLAB仿真[M]. 北京:电子工业出版社, 2004.
[7]李友善, 李军. 模糊控制理论及其在过程控制中的应用[M]. 北京: 国防工业出版社, 1993: 78-85.
[8]黄友锐, 曲立国. PID控制器参数整定与实现[M].北京: 科学出版社, 2010: 22-25.
[9]王宝瑛, 朱方明, 曹秉刚等. 电动汽车用DC/DC变换器模糊自整定PI控制[J]. 电力电子技术, 2007,41(1), 48-50.
[10]任碧莹, 余健明, 同向前等. 混合式自调整模糊控制在DC/DC变换器中的应用[J]. 电力电子技术,2001, 35(6), 23-25.
[11]Arnaldo M, Miguel S. SEPIC Type DC-DC Converter Fuzzy Model[C]. ICROS -SICE International Joint Conference, Japan: Fukuoka International Congress Center, 2009: 891-895.
[12]许会军, 王萍. 移相全桥变换器的模糊PID预测控制[J]. 计算机仿真, 2007, 24(1): 246-249.
[13]王萍, 辛爱芹, 邹宇. 高性能模糊PID控制DC/DC变换器[J]. 电力电子技术, 2007, 41(8): 102-103.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
数学大世界(2021年4期)2021-03-30
山东农业大学学报(自然科学版)(2020年5期)2020-11-02
电子制作(2019年19期)2019-11-23
西华大学学报(自然科学版)(2018年6期)2018-11-24
电子制作(2018年19期)2018-11-14
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
电测与仪表(2016年23期)2016-04-12
通信电源技术(2016年5期)2016-03-22
