基于ARM触摸屏的无刷直流电动机控制系统设计
2012-07-20 04:00王严伟李声晋
微特电机 2012年1期
王严伟,卢 刚,李声晋,周 勇
(西北工业大学,陕西西安710072)
0 引 言
无刷直流电动机具有结构简单、线性机械特性、易于维修、调速范围较宽、稳定性高、起动转矩大等诸多优点,在军事、精密加工等对电机性能要求较高的场合应用日益广泛。由于采用霍尔位置传感器、旋转变压器等技术,便于实现无刷直流电动机的换向,而且将采集的位置信号传至控制单元以实现闭环控制,系统性能得到大大提高。目前,无刷直流电动机的控制大都采用了功能较少的微处理器芯片,无刷直流电动机的控制技术基本停留在前台操作后台运行模式。随着系统复杂性的增加,除了系统的可靠性之外,系统对扩展性、操作简单化、实时性、可视化操作提出了更高要求。8位或16位微处理器难以满足上述性能的要求,而采用LPC2290之后不仅可以实现对无刷直流电动机的控制,更重要的可以实现电机控制的可视化,而且在移植μC/OS-II后,更容易扩展系统功能、提高系统可靠性和加快软件开发周期。为了系统操作简单化、电机运行可视化和便于系统功能扩展,本文给出了一种基于32位ARM7微处理器LPC2290、通用型嵌入式应用图形软件μC/GUI和实时操作系统μC/OS-Ⅱ的无刷直流电动机数字控制方法,将运动控制、故障检测和人机交互集成于一体,实现系统控制。
1 硬件设计
1.1 LPC2290 结构特点
LPC2290是一款基于ARM7TDMI-S内核的32位RISC嵌入式微处理器,具有功耗低、价格便宜、性能高的特点。LPC2290带有256 k字节嵌入的高速Flash存储器可以使得芯片达到较高的读写速度;多个物理接口,便于应用于工业现场控制;8路A/D转换器;2个32位定时器;最多可支持76个输入/输出口,这些引脚均可以用来驱动发光二极管、检测开关信号和键盘输入信号以及与片外信号通信等;基于时钟匹配的6路脉宽调制器PWM。LPC2290同样有着ARM的其它特点,正是这些优点使得它可以嵌入实时操作软件μC/OS- Ⅱ 和 图 形 软 件 μC/GUI。正 是 由 于LPC2290的6路PWM使得实现无刷直流电动机控制成为了可能。
1.2 无刷电机驱动电路设计
主功率电路采用MOSFET三相全桥逆变电路。LPC2290输出六路PWM信号至IR2130,然后经过三相逆变电路到电机三相星型绕组,无刷直流电动机的霍尔传感器将转子位置信号传回LPC2290实现闭环控制。图1为逆变桥六个MOSFET中的Q1和Q4驱动电路。IR2130输入端接有上拉电阻使得在无信号输入时能够准确关断功率 MOSFET。FAULT管脚与ARM的外部中断管脚连接,由ARM来实现故障中断。三相逆变桥电路原理图如图2所示。由于逆变桥的Q4、Q5、Q6三个MOSFET是可以共地的,而Q1、Q2、Q3共地导致短路,故需要自举电路来驱动。在MOSFET关断时为了减小关断损耗在逆变桥中与MOSFET并联了RC串联缓冲电路。
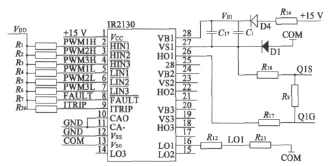
图1 MOSFET驱动电路原理图

图2 三相逆变桥电路原理图
1.3 彩色液晶触摸屏驱动电路设计
本设计要对电机运行状态进行图形显示和滑动条框初始化设置,故采用5.2英寸彩色液晶屏。S1D13503F为液晶驱动芯片,该驱动芯片支持在液晶屏上显示文本和图形,最多可支持640×256点阵的液晶屏,完全兼容本设计采用的320×240液晶屏。彩色液晶驱动电路图如图3所示。电路主要包括控制部分、接口部分、地址总线和时钟晶振等。为了有良好的图形显示效果,选用了20 MHz晶振。本设计采用了8 bit数据总线,故没将VD0接上拉电阻。由于LPC2290发出的图像数据不能够达到显示满屏的要求,需要外扩存储器。IS61C1024是一种高速低功耗8位COMS静态存储器,读写速度可以达到40 MHz,满足对数据显示的要求。当图形数据从LPC2290传至显示模块时首先存储到IS61C1024,达到一屏数据时由S1D13503F驱动显示到液晶屏上。
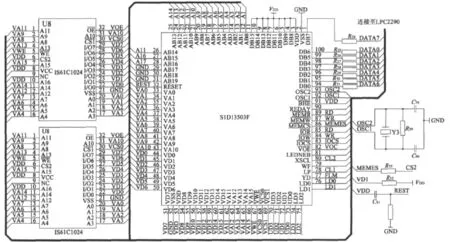
图3 彩色液晶驱动电路原理图
在触摸屏控制中,采用FM7843触摸屏控制芯片,该芯片最大可达125 kHz模数转换速率完全达到对系统实时性的要求。需要采集触摸屏信号时,LPC2290要提供时钟信号CLK、片选信号CS和数据信号DIN,当模数转换完成后中断信号INT使得产生中断数据通过DOUT传至LPC2290完成触摸屏信号采集。触摸屏接口电路图如图4所示。
2 软件设计
触摸屏、液晶显示及电机控制需要一个很好的操作内核和图形显示软件。图5给出了总体软件系统分层体系结构图。最上层为协调控制层,主要实现触摸屏信号捕捉、液晶屏的显示等。中间层为运动控制层,主要实现PWM信号输出,控制电机转速、正转、反转等。最下层为传感反馈层,主要将无刷直流电动机霍尔位置传感器的反馈信号经过AD转换回传至 LPC2290,此时信号经过微处理器解算,发出信号,控制电机和实现液晶屏显示,达到闭环控制的目的。
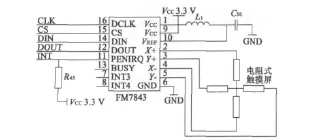
图4 触摸屏接口电路图
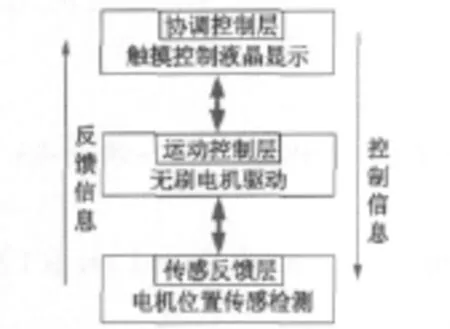
图5 软件系统分层体系结构
系统采用μC/OS-II操作系统作为软件应用平台,μC/GUI用于图形用户接口。实时多任务的操作内核μC/OS-II的优点很多文献资料都有论述,本文不再叙述。μC/GUI软件设计思想是模块化分层,使用ANSI C语言编写,因此具有很强的移植性,几乎适用于所有的CPU。
2.1 应用软件的移植
编写应用软件之前要移植μC/OS-II和μC/GUI图形库软件。系统中的LPC2290微处理器和开发环境ADS 1.2完全满足移植要求。由于μC/OS-II操作系统自身的特点,要移植到一个微处理器上时一般要修改三个文件:OS_CPU.H(C语言头文件),OS_CPU_A.S(汇编语言源文件)和OS_CPU_C.C(C程序源文件)。在这些文件中要修改的包括数据类型、常量、函数、中断服务程序等。
由于μC/GUI提供了源代码,可以很容易地移植到LPC2290平台下。μC/GUI的系统构架从上至下分为用户层、μC/GUI系统层、LCD驱动层和硬件操作层。μC/GUI的移植需要配置的文件有GUIConf.h 和 LCDConf.h。在 GUIConf.h 中,需要配置好指定的开关参数,包括一些最基本的GUI图形预定义控制。在LCDConf.h文件中指定了LCD屏的宽高320×240、使用8位来表示一个像素。
2.2 液晶触摸屏驱动程序设计
液晶触摸屏程序主要包含基准点的测试、触摸屏校准、触摸屏信号的滤波、以及将触摸点显示在液晶屏上。触摸程序采用两次触摸坐标,如果两次采样的坐标相差超过设定阈值,那么坐标值被抛弃;如果在设定阈值内,那么这两个坐标值均值滤波后返回。只要有数据到达控制寄存器,驱动器就会选通液晶控制器内部寄存器片选信号,依次向16个内部控制寄存器中写入正确的参数。图6为液晶触摸屏起动和设置界面,设置电机转速信号。图7为速度实时显示和数据保存界面,显示电机转速信息和数据保存。实际测试表明,界面上各控件均能对触摸笔作出反应,回调函数能够及时得到执行,速度信号能及时在显示界面上显示。

图6 液晶触摸屏起动和设置界面
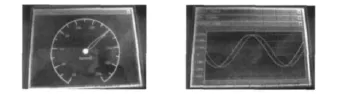
图7 速度实时显示和数据保存界面
显示屏系统模块初始化后,首先用示波器检测三个信号,分别是FLM处的扫描起动脉冲信号、XSCL处的X轴驱动数据移位时钟信号、CL1处的锁存脉冲信号。待检测到的信号正确后,便可以对液晶显示屏操作。一个FLM帧信号表示更新一屏数据,一个CL1信号表示更新一行数据,每更新一行数据需要120个CL2时钟信号。编写液晶显示程序首先要找出需要显示数据的目标地址(a,b),定义最左上角为坐标原点,然后向指的坐标点写入要显示的数据。目标地址的计算公式和输出数据的格式如下:
(1)需要显示数据的目标地址
addr=b*320+a;
DAT_Point=(void*)S1D13503F_DAT;
DAT_Point+=addr;
(2)输出数据
*DAT_Point=gui_disp_buf[y][x];
2.3 电机驱动程序设计
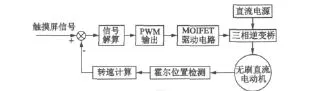
图8 无刷直流电动机转速控制软件框图
无刷直流电动机转速控制软件框图如图8所示。触摸屏给出转速控制信号后与霍尔位置传感器上传的信号在LPC2290中解算,将信号传给PWM模块,此时MOSFET驱动电路输出触发电压,三相逆变桥中相应功率管导通,实现无刷直流电动机转速的位置闭环控制。
3 实验测试
在实验室中系统进行了测试,试验中得到了初步的验证,电机调速、正反转及实现触摸屏控制液晶显示。为了实现电机转速闭环控制,系统使用双极性PWM控制。功率器件斩波频率为20 kHz,时基计数为向上向下模式,设定死区时间。电机的PWM双极性控制中,同一桥臂的PWM(如PWM1H和PWM1L、PWM2H 和 PWM2L、PWM3H 和 PWM3L)是互补输出的,示波器测得的PWM波形如图9所示。为了防止逆变器中同一桥臂的功率MOSFET在开关过程中出现同一桥臂的两个MOSFET都处于开通状态,在这种情况下将会出现短路现象,电路中电流剧增、器件损坏需要在其间插入一个死区时间,确保不发生短路,如图10所示。
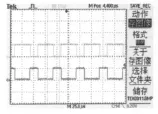
图9 同一桥臂MOSFET栅极PWM互补驱动信号
图10 IR2130输出的PWM死区时间
4 结 语
本文给出了基于触摸屏的无刷直流电动机控制系统硬件电路图、液晶触摸屏驱动程序和电机驱动程序设计方案,移植图形库软件μC/GUI和实时多任务操作系统μC/OS-II到LPC2290中,使无刷电机控制与操作简单化、可视化。由于嵌入式特有的优点,在此基础上完成功能扩展,结合具体工程要求可以应用于数控机床和各种电机控制等。
[1] 田海波,方宗德,杨坤,等.轮腿式机器人设计及其运动特性分析[J].机械设计,2010,27(6):42 -47.
[2] 陈荣,芦刚,李声晋.一种基于ARM的多任务的BLDCM控制系统设计[J].测控技术,2007,26(8):37 -39.
[3] 韩山,郭云.ARM微处理器应用开发技术详解与实例分析[M].北京:清华大学出版社,2007:268-299.
[4] 周立功.ARM嵌入式MiniGUI初步与应用开发范例[M].北京:北京航空航天大学出版社,2006:129-247.
[5] 徐军.嵌入式μC/GUI的移植与平台开发[J].自动化与仪表,2007(3):76-79.
[6] 刘滨,刘静静,曹旭阳.嵌入式图形接口 μC/GUI在 μC/OSⅡ上的移植[J].2007,23(2):23-25.
猜你喜欢
数学物理学报(2021年6期)2021-12-21
液晶与显示(2020年8期)2020-08-08
液晶与显示(2020年5期)2020-05-06
装备制造技术(2019年12期)2019-12-25
电子制作(2018年19期)2018-11-14
知识就是力量(2018年7期)2018-07-11
山东工业技术(2017年20期)2017-10-17
科教导刊·电子版(2016年36期)2017-04-22
电脑知识与技术(2016年17期)2016-07-23
液晶与显示(2015年1期)2015-02-28