直线超声波电动机定子和夹持元件的一体化设计
2012-07-23 06:35姚志远耿冉冉
微特电机 2012年5期
胡 宁,姚志远,耿冉冉,叶 明
(南京航空航天大学,江苏南京210016)
0引 言
直线超声波电动机具有结构简单、重量推力比大、直接驱动、动子惯性小、响应快、断电自锁、可控性好和定位精度高等特点,它在精密驱动、航空航天和武器装备等领域有着广泛的应用前景[1]。
直线超声波电动机的运行机理和结构设计首先受到关注。1983年,指田年生提出了两种行波型直线超声波电动机[2]。1998年,Kurosawa等人研制了一种驻波型直线超声波电动机[3]。该电机最大输出力达 51 N,最大速度为 3.5 m/s。2004年,T.Hemsel,J.Wallaschek等人研制出了一款新型的基于面内振动的直线电动机[4],该电机也有良好的输出特性。
随着对直线超声波电动机运行机理的理解和定子结构设计方法的完善,直线超声波电动机的输出力和速度进一步提高。下一步的研究重点是如何提高电机结构的稳定性、运行平稳性和运行效率,以便提高电机的控制精度。
V型直线超声波电动机是典型的利用兰杰文振子设计的直线超声波电动机。由于该振子利用了连续变幅杆和压电陶瓷的d33效应,因此具有好的输出特性,受到关注。但是,该电机是由驱动足、压电陶瓷片、配重块和夹持件元件组成,它通过施加预紧力把这些配件组装起来的。各配件的加工误差和定子的装配误差使得装配后定子的振动特性不一致,影响电机运行的运行效率和运动稳定性。
本文研究提出利用柔性铰链代替弹簧提供预压力,并将通过把驱动足、定子配重块和柔性铰链夹持元件设计为一整体,利用贴片的方式粘贴压电陶瓷片。该设计方式将消除加工误差和定子的装配误差对振动特性的影响,提高超声波电动机的输出效率和运行稳定性。
1电机定子的结构设计
V型直线超声波电动机由配重块、驱动足、夹持件、陶瓷片、电极片和内六角螺栓组成。驱动足的端面有螺纹孔,用于旋入螺栓。它将驱动足、配重块、电极片、陶瓷片和夹持元件装配为一体,构成直线超声波电动机定子。上述装配过程需要施加足够大的预紧力。受施加预紧力的方式限制,定子的2个兰杰文振子的预紧力存在偏差,导致定子的两相振动模态不一致。
夹持元件有直径为4 mm的孔(在定子的结构对称轴上),通过孔穿在滑动螺栓上,用于夹持定子结构。在滑动螺栓上有弹簧元件,用于施加预压力。图1是V型直线超声波电动机的样机。在上述夹持方式中,夹持点仅有这一个点,使得定子的结构稳定性差。另外,通过弹簧施加预压力,必然在夹持元件和滑动螺栓之间存在间隙,导致定子振动的非线性。

图1 V型直线超声波电动机的样机
为了使提高定子结构振动特性的一致性,改善定子结构夹持的稳定性,消除非线性振动边界,本文提出将驱动足、配重块和支持元件设计为一体,通过线切割一次加工完成。一体化加工的定子结构如图2所示。

图2 压电陶瓷片的极化布置方案
所设计定子两个面上分别黏贴4片压电陶瓷片。压电陶瓷片在其厚度方向极化,其极化方向由黏贴面直线定子的内部。每个兰杰文振子上有4片压电陶瓷片,它们分别构成电机的A、B两相。

图3 压电陶瓷布局及施加电压
A、B 两相分别施加 sin ωt和 cos ωt信号。经电场的作用,定子激发出对称模态和反对称模态。在对称和反对称模态响应的作用下,在驱动足处形成椭圆运动轨迹。
2定子结构的设计
2.1定子的振动模态
利用有限元法建立电机定子模型并通过调节定子尺寸使得对称模态和反对称模态频率一致性更好。计算中,45#钢部分采用solid45单元,压电陶瓷部分采用solid5单元。划分网格如图4所示。

图4 网格划分
通过有限元模态分析,在超声频率范围内,找出所需要的对称模态频率和反对称模态频率,如表1所示。

表1 定子模态频率对比
2.2柔性夹持设计
柔性夹持的柔性片段设计为圆弧形,通过采用不在同心两个圆弧,设计成柔性圆弧夹持在两端的厚度(2 mm)大于柔性圆弧夹持中部厚度(0.7 mm),保证柔性夹持结构强度同时保证其弹性作用。运用有限元分析其弹性系数k=156 N/mm。考虑到定子的振动模态,柔性铰链夹持连接在配重块的节面处,减少对电机振动影响。根据理论与经验,在定子中间用柔性铰链连接在一起,保证定子在受预压力时,两相定子不会出现大的变形,同时电机在运行时,保持结构稳定性。
3实验研究
3.1定子模态实验
根据设计与计算所得到合适的定子结构参数,并加工电机样机,如图5所示。用Polytec公司的PSV300F-B型高频扫描激光测振系统测试定子振动模态,并与有限元模态计算结果相比较。表1为振动模态频率实验和计算的结果。

图5 所设计的直线超声波电动机样机
实验与有限元计算结果吻合较好。主要原因是超声波电动机一体化设计消除了装配误差,整个电机定子为一体结构,使得定子模态参数更接近于理论值,也使得各个电机定子之间模态频率相差很小,有利于超声波电动机的批量生产。同时扫频试验表明,该设计消除了电机定子两相干扰模态,使得电机模态扫频只存在一个波峰。
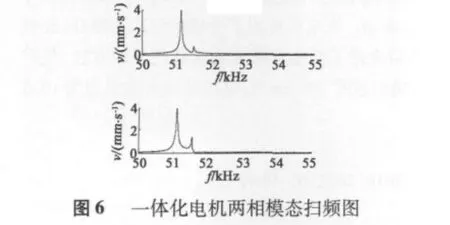
图6是一体化设计的电机定子的两相模态扫频图,从图7是原V型电机定子的两相模态扫频图。图6、图7中可以看出:相比较于传统电机,一体化电机两相模态频率比较纯,没有干扰模态频率,两相频率一致;但是工作频率更高,工作频带更窄。

3.2机械输出特性
图8表明,电机的最佳工作频率为51.4 kHz,但是它的工作频带较窄,不利于速度调节。图9是电机速度随相位差的关系曲线,它表明电机在相位差为90°时,其运行效果最好,同时在25°~140°的相位差范围内均可工作。图10是电机空载速度随激励电压的变化规律。它表明电机速度随电压呈线性增加。它说明了电压越大,电机获得能量越大,电机运行速度便会加大。

图8 电机速度频率特性
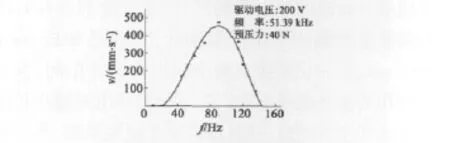
图9 电机速度相位差特性
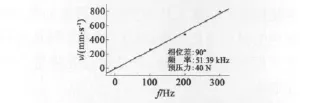
图10 电机速度电压特性
经测试,预压力为40 N,驱动电压200 V时,电机最大输出力15 N,空载速度为471 mm/s,定子质量为125 g,推重比达12。
4结 语
针对V形直线超声波电动机因装配误差导致的两相频率不一致的问题,本文提出超声波电动机定子和夹持元件一体化设计的方法。通过有限元分析,设计出具有柔性夹持元件的定子,该定子和夹持元件构成一个整体结构,并通过线切割一次加工而成。
研制了具有柔性夹持的直线超声波电动机样机,并开展了实验研究。实验表明,该设计方法消除了V形直线超声波电动机因加工装配导致的两相频率不一致的问题,并确保定子两相模态频率一致性。
在200 V电压下,该电机最大输出力为15 N,最大空载速度达到471 mm/s,推重比为12。它表明一化设计方法能够用于电机设计,它减少了加工装配程序,保证定子两项模态频率的一致性,更有利于批量生产。
[1] 赵淳生.超声电机技术与应用[M].北京,科学出版社,2007.
[2] 见诚尚志,指田年生.超音波モ-タ入门[M].东京:总和电子出版社,1991:16-23.
[3] Wakai T,Kurosawa T K,Higuchi T.Transducer for an ultrasonic linear motor with flexible driving part[C]//IEEE Ultrasonic Symposium.Miyagi,Japan,1998:683-685.
[4] Hemsel T,Mracek M,Wallaschek J,et al.A novel approach for high power ultrasonic linear motors[J].IEEE Ultrasonics ymposium,2004,2:1 161-1 164.
[5] 黄国庆,刘群亭,黄卫清,等.直线型超声电机的现状[J].微特电机,2003,31(2):24-26.
[6] 李朝东,姚华,裴仁清,等.仿生步行小型直线超声电机[J].微特电机,2001,29(6):10-11.
[7] 杨东,姚志远.双变幅杆V形直线超声电机研究[J].压电与声光,2009,31(5):685-688.
[8] 姚志远,杨东,赵淳生.杆结构直线超声电机的结构设计和功率流分析[J].中国电机工程学报,2009,29(24):56-60.
[9] 吴鹰飞,周兆英.柔性铰链的设计计算[J].工程力学,2002,19(6):136-140.
[10] Lee W M,Kim W S.A high power and precision ultrasonic linear motor with lateral flexible[J].Towards Synthesis of Micro Nano systems,2007(A4):101-106.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年4期)2021-07-28
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10