
基于跨航向稀疏阵列的机载下视MIMO 3D-SAR三维成像算法
2012-07-25 04:10彭学明王彦平谭维贤吴一戎
电子与信息学报 2012年4期
彭学明 王彦平 谭维贤 洪 文 吴一戎
①(微波成像技术国家重点实验室 北京 100190)
②(中国科学院电子学研究所 北京 100190)
③(中国科学院研究生院 北京 100049)
1 引言
下视阵列机载3D-SAR[1]是一种新的3维SAR成像体制,它在方位向通过合成孔径原理获得分辨能力,在波传播方向通过脉冲压缩技术获得分辨能力,在跨航向通过布置一个线性阵列,由孔径综合、波束形成[2]等方法获得分辨能力。由于下视阵列机载3D-SAR采用下视观测方式,能够很好地解决常规2维SAR中的几何失真、左右模糊[3]问题。另外下视阵列机载3D-SAR的下视3维观测能力,使得它在城区测绘、山区搜索和自然环境灾害监测中具有广泛的应用前景。因此,下视阵列机载3D-SAR得到了国内外许多研究机构的重视,中国科学院电子学研究所开展了下视阵列3D-SAR的成像机理验证和成像试验装置研究[4],电子科学技术大学也开展了下视阵列 3D-SAR原理验证和成像算法方面的研究[5-7],法国 ONERA 的 DRIVE 系统[8,9]和德国FGAN-FHR 的 ARTINO 系统[1]也针对下视阵列3D-SAR进行了相关的研究。
下视阵列机载3D-SAR在波传播方向和方位向均比较容易做到高分辨成像,但是其跨航向分辨能力受限于阵列的长度,要想获得跨航向高分辨率,需要在跨航向布置一个很长的线性均匀阵列。这样的线性均匀阵列需要很多的天线单元,提高了系统复杂度和经济成本。解决这一困难的有效方法之一是在跨航向布置稀疏阵列单元,通过相位中心等效原理[10]等效得到跨航向线性均匀分布的相位中心。ARTINO系统和文献[11]都给出了下视3维成像稀疏阵列的设计方法,本文在参考上述工作的基础上将 MIMO Radar[12,13]技术应用到下视阵列机载3D-SAR成像研究中。
在下视阵列机载3D-SAR成像算法方面,文献[4-6]都是针对单发射天线或双发射天线构型的下视阵列机载3D-SAR;文献[10]分析了ARTINO系统的3维成像原理,但是没有分析距离徙动问题,由于下视阵列3D-SAR的距离历程与方位向采样和跨航向采样均有关系,因此文献[9]提到的方法在跨航向测绘带较大的情况下不适用。文献[7]提出了一种多发多收虚拟阵列的3维成像算法,该算法在跨航向采用的是数字波束形成的方法,需要对接收阵列的各阵元沿方位角加权再相加才可以得到该阵列沿方位角的波束形成。在接收阵元数目较多、成像场景较大的场合,该算法计算量非常大。文献[14]给出了机载稀疏阵列下视3维SAR的3维RD算法,文中按照等效阵列进行了距离历程推导,并且对距离历程进行了菲涅尔近似,没有考虑近似对成像性能带来的影响。
本文首先给出了收发天线分置的跨航向稀疏阵列MIMO机载3D-SAR成像几何模型,然后在此几何模型的基础上导出了跨航向稀疏阵列 MIMO机载3D-SAR的3维回波信号模型,针对3维信号模型中的距离历程与方位向采样和跨航向采样均相关的特点,将3维回波信号模型由直角坐标系(波传播方向-方位向-跨航向)变换到柱面坐标系(斜距向-方位向-俯仰向),然后提出了柱面坐标系下的 3维成像算法,最后在柱面坐标系内对仿真回波数据进行斜距向、方位向、俯仰向压缩得到了跨航向稀疏阵列MIMO机载3D-SAR 3维成像结果并分析了成像指标,验证了成像算法的有效性。
2 跨航向稀疏阵列机载下视 MIMO 3DSAR几何模型
我们设定成像场景的3维空间坐标系为O-xyz,如图1所示。飞机飞行高度为H,飞机沿x方向以速度V飞行。图1是跨航向稀疏阵列MIMO机载3D-SAR几何模型(其中圆圈代表发射单元,方框代表接收单元,发射单元位于阵列两端,每端有M个发射单元,接收单元位于阵列中间,总共有N个接收单元)。2M个发射单元和N个接收单元通过相位中心等效原理,总共得到了2MN个均匀的虚拟相位中心。跨航向稀疏阵列虚拟相位中心等效示意图如图2所示。假设天线阵列长度为L,虚拟相位中心长度为Ls,为防止跨航向出现模糊,跨航向采样须满足奈奎斯特采样定理,由此可以推导出发射单元间距d≤De,其中De为发射单元在跨航向上的尺寸。
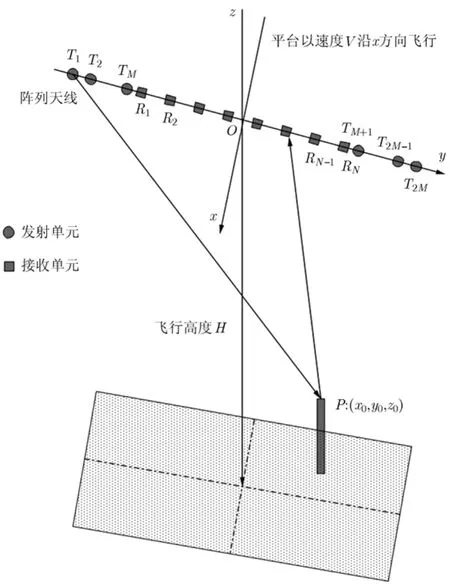
图1 跨航向稀疏阵列机载下视MIMO 3D-SAR几何模型

图2 跨航向稀疏阵列等效相位中心示意图
发射单元指向机下点,成像区域为飞机的正下方场景,设发射单元在方位向和跨航向的波束宽度分别为aT和bT,接收单元在方位向和跨航向的波束宽度分别为aR和bR。为保证发射单元照射范围内的所有回波信号都能被接收单元接收到,须保证接收单元在方位向和跨航向的波束宽度大于发射阵元的波束宽度,即aR≥aT,bR≥bT。
3 跨航向稀疏阵列机载下视 MIMO 3DSAR回波信号模型
本文采用了时间分集的方式来区分各个发射单元之间的信号。并且两个发射信号的时间间隔大于发射信号持续时间和信号接收窗的时间之和。
根据图 1所示的几何模型中采用的直角坐标系,我们假设发射单元的坐标为(x,yT,0),接收单元的坐标为(x,yR,0),对于图1中所示的发射单元和接收单元,

发射单元和接收单元到场景目标P的距离分别为

电磁波由发射单元发射到被接收单元接收到的整个距离历程为

由式(3)看出对于场景目标P的距离历程与方位向采样x和跨航向采样yT,yR均有关,这使得距离单元徙动问题更为严重,距离单元徙动校正也更加复杂。为了简化距离单元徙动校正,我们引入柱面坐标系。图3给出了直角坐标系和柱面坐标系的定义。

图3 直角坐标系和柱面坐标系的定义
场景目标P的直角坐标 (x0,y0,z0)到柱面坐标(x0,r0,q0)的变换为

在柱面坐标系O-xrq中,场景目标P的距离历程为

对地观测中,r0非常大,因此对上述距离历程进行泰勒级数展开并忽略三次及三次以上的高次项。泰勒展开后场景目标P的距离历程为

假设该机载3D-SAR的发射信号p(t)为线性调频脉冲信号

其中Tp为脉冲宽度,fc为发射信号载波频率,Kr为线性调频信号的调频率,线性调频信号的带宽B=Kr Tp, rect(·)表示发射信号的包络,为矩形函数。
经过解调后的机载 3D-SAR回波信号模型如下:

其中s为解调后的回波信号幅度。
4 跨航向稀疏阵列机载下视 MIMO 3DSAR成像算法
采用时分的方式区分不同的发射信号,由于平台的运动,使得不同脉冲下得到的等效相位中心在方位向发生相对运动,一个孔径综合周期内获得的等效相位中心将不在同一条直线上,因此,在成像处理之前,需要对获取的回波数据进行运动补偿,使得孔径综合的相位中心分布在同一条直线上,然后在进行3维成像处理。
需要补偿的相位为[10]

其中i∈ [ 1,2M],k∈ [ 1,2N- 1 ],i代表第i个发射单元,2N-1表示获取的数据在方位向的采样点数,2M表示有2M个发射单元,V为平台的飞行速度,PRF表示脉冲重复频率,Δxi表示在第k个方位向采样点处,第1个发射单元到第i个发射单元期间内平台运动的距离。
结合该机载3D-SAR的距离历程和回波信号模型可以看出:

其中,第1个相位项包含了斜距向信息,第2个相位项包含了方位向信息,第3个相位项包含了俯仰向信息,最后一个相位项对成像没有影响。常规 2维SAR回波信号模型中也存在第2个与第2个相位项,因此3维成像处理中,斜距向和方位向可以采用距离多普勒算法处理,俯仰向信息中存在一个二次相位项,并且yT和yR代表发射单元和接收单元的坐标位置,飞机高空飞行时,跨航向阵列的长度相比斜距r0来说非常小,因此俯仰向的信息满足SPECAN(频谱分析)处理的条件[15],可以使用频谱分析的方法进行俯仰向成像处理,最终得到斜距向-方位向-俯仰向的3维SAR图像。
(1)斜距向处理斜距向压缩是在距离向频域-方位向空域-俯仰向空域通过匹配滤波完成的。回波信号在距离向频域-方位向空域-俯仰向空域的表达式为

斜距向匹配滤波参考函数为

斜距向匹配滤波后的信号经斜距向逆傅里叶变换完成压缩,压缩后的信号为

其中Ar为斜距向压缩后的信号幅度,B为线性调频信号的带宽。
(2)方位向处理 方位向压缩是在斜距向空域-方位向波数域-俯仰向空域完成的。利用驻定相位原理,将斜距向压缩后的信号变换到方位向波数域:
其中Ka= 2 /lr0表示方位向信号调频率,Cr为与方位向压缩无关的项。

由驻定相位原理,求得方位向的时频关系为kx=- 2pKa(x-x0)。
距离历程中方位向的距离徙动项为 (x-x0)2/r0,方位向压缩前先校正该距离徙动项。
方位向距离徙动校正之后的信号为

方位向匹配滤波参考函数为

方位向匹配滤波后经过逆方位向傅里叶变换完成方位向压缩,方位向压缩后的信号表达式为

其中Aa为方位向压缩后的信号幅度,Ba=2a/l为方位向信号带宽。
(3)俯仰向处理 方位向距离徙动校正后得到的距离徙动项为

该距离徙动项与斜距r0和俯仰角q0均有关,针对r0对数据分块,对每一块数据使用场景中心处的斜距在俯仰向校正该距离徙动项。
距离徙动校正参考函数为

俯仰向距离徙动校正后的信号表达式为

其中Ke=cos2q0/lr0为俯仰向信号调频率。
对俯仰向距离徙动校正后的信号进行解斜操作,消除俯仰向的二次相位项,解斜参考函数为

解斜后的信号为

解斜后的信号进行傅里叶变换,完成俯仰向压缩,俯仰向压缩后的信号为

由S_ image可以看出该算法完成了斜距向、方位向、俯仰向的聚焦,最终得到了斜距向、方位向、俯仰向的3维分辨图像。
跨航向稀疏阵列MIMO机载3D-SAR在斜距向、方位向、俯仰向的分辨率为

其中Da为接收天线单元在方位向的尺寸,Ls为整个稀疏阵列等效得到的虚拟阵列的长度(斜距向和方位向的分辨率单位为m,俯仰向的分辨率单位为弧度,也可以换算成角度)。
5 跨航向稀疏阵列机载下视 MIMO 3DSAR成像仿真实验
成像仿真实验参数示于表1。成像结果分辨率、峰值旁瓣比、积分旁瓣比指标示于表2。
仿真的场景是空间中分布的7个点目标,使用本文提出的成像算法对回波数据进行处理,7个目标的-33 dB 3维成像结果如图4所示,从图4可以看出目标的脉冲响应比较符合理论情况;图5~图7分别为目标在斜距-方位向、方位-俯仰向、斜距-俯仰向的2维剖面成像结果,从图4~图7结合成像指标分析可以看出,该成像算法可以精确重建场景目标的3维图像。从上述仿真结果可看出,采用收发天线分置的跨航向稀疏阵列 MIMO机载 3DSAR,不仅减少了天线数目,降低了系统复杂度,还能获得较理想的3维成像结果。

表1 仿真实验参数
6 结束语
本文首先给出了跨航向稀疏阵列 MIMO机载3D-SAR的成像几何,并推导了该成像几何条件下的3维回波信号模型。然后结合场景目标的距离历程和回波信号模型提出了柱面坐标系中的3维成像算法。最后通过仿真实验精确重建了场景目标的 3维图像,并给出了成像结果的分辨率、峰值旁瓣比、积分旁瓣比,通过这些成像指标验证了算法的有效性。在实际的3维成像系统中,线性阵列的各个通道之间会存在通道间相位误差,对成像造成一定影响,这也是使用本文的算法在处理实际数据时需要进一步研究的内容。

表2 成像结果分辨率、峰值旁瓣比、积分旁瓣比指标

图4 3维成像结果(-33 dB结果)

图5 斜距-方位向成像结果

图6 方位-俯仰向成像结果图

图7 斜距-俯仰向成像结果
[1]Klare J, Brenner A R, and Ender J H G. A new airborne radar for 3D imaging-image formation using the ARTINO principle[C]. 6th European Conference on Synthetic Aperture Radar, Dresden, Germany, May 16-18, 2006: 16-18.
[2]Gierull C H. On a concept for an airborne downward-looking imaging radar[J].International Jounal of Electronics and Communications, 1999, 53(6): 295-304.
[3]保铮, 刑孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005: 103-105.
[4]杜磊. 阵列天线下视合成孔径雷达三维成像模型、方法与实验研究[D]. [博士论文], 中国科学院电子学研究所, 2010: 61-86.
[5]成晨, 张晓玲. 基于MUSIC算法的超分辨率三维SAR成像方法[OL]. 中国科技论文在线. http://www.paper.edu.cn/index.php/default/releasepaper/content/201012-1046. 2011.1.
[6]Zhang Dong-hao and Zhang Xiao-ling. Downward-looking 3-D linear array SAR imaging based on Chirp scaling algorithm[C]. Asia-Pacific Conference on Synthetic Aperture Radar 2009, Xi’an China, Oct. 26-30, 2009: 1043-1046.
[7]李伟华, 张晓玲. 一种基于多发多收的虚拟阵列的三维SAR成像模型[C]. 第十届全国雷达学术年会, 北京, Oct. 31-Nov.2, 2008: 1308-1311.
[8]Nouvel J F, Roques S, and Ruault du Plessis O. A low-cost imaging radar: DRIVE on board ONERA motorglider[C].IEEE International Geoscience and Remote Sensing Symposium 2007 (IGARSS 2007), Barcelona, Spain, July 23-27, 2007: 5306-5309.
[9]Nouvel J F, Ruault du Plessis O, Svedin J,et al.. Along track interferometry on rhone river [C]. 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany,2008: 495-497.
[10]Hou Ying-ni, Li Dao-jing, and Hong Wen. The thinned array time division multiple phase center aperture syhthesis and spplication[C]. IEEE International Geoscience and Remote Sensing Symposium 2008 (IGARSS 2008), Boston,Massachusetts, USA, 2008: 25-28.
[11]Xie Wen-cheng, Zhang Xiao-ling, and Shi Jun. MIMO antenna array design for airborne down-looking 3D imaging SAR[C]. Signal Processing Systems(ICSPS) 2010 2nd International Conference, Dalian, China, July 5-7, 2010, Vol 2: 452-456.
[12]Li Jian. MIMO Radar Signal Processing[M]. Hoboken, New Jersey, John Wiley & Sons, Inc., 2009: 65-77.
[13]Klare J, Ceruttii-Maori D, Brenner A,et al.. Image quality analysis of the vibrating sparse MIMO antenna array of the airborne 3D imaging radar ARTINO[C]. IEEE International Geoscience and Remote Sensing Symposium 2007 (IGARSS 2007), Barcelona, Spain, July 23-27, 2007: 5310-5314.
[14]叶荫, 刘光炎, 孟喆. 机载下视稀疏阵列三维SAR系统及成像[J]. 中国电子科学研究院学报, 2011, 6(1): 96-100.
[15]Reigber A. Airborne polarimetric SAR tomography[D].[Ph.D.dissertation], University of Stuttgart, 2001: 65-70.
猜你喜欢
党员文摘(2022年14期)2022-08-06
舰船科学技术(2022年10期)2022-06-17
党员文摘(2022年7期)2022-04-28
电力勘测设计(2022年2期)2022-03-08
党员文摘(2022年1期)2022-02-14
党员文摘(2022年3期)2022-02-12
新世纪智能(高一语文)(2021年3期)2021-07-16
中国惯性技术学报(2019年5期)2020-01-07
民用飞机设计与研究(2019年4期)2019-05-21
测绘通报(2017年2期)2017-03-07
