
无线传感器网络信息时空融合模型与算法研究*
2012-07-25 05:34鲍必赛伍健荣楼晓俊刘海涛
传感器与微系统 2012年4期
鲍必赛,伍健荣,楼晓俊,刘海涛,2
(1.中国科学院上海微系统与信息技术研究所无线传感器网络与通信重点实验室,上海 200050;2.无锡物联网产业研究院,江苏无锡 214135)
0 引言
无线传感器网络是由大量的能量、计算、存储及通信有限的传感器节点组成[1]。信息融合技术可以有效地降低能耗,解决能量和通信带宽等方面的受限问题,延长网络寿命。同时,信息融合技术也能够解决因环境干扰和传感器节点失效等带来的不确定性,提供信息的准确度[2]。
无线传感器网络中的信息融合一般有2个过程,一是时间序列上的信息融合,称为时间融合;一是分布式空间上的信息融合,称为空间融合。因此,一般将无线传感器网络中的信息融合称为时空融合。时空融合的关键问题是模型设计,本文提出了一种时间和空间多级混合融合的结构模型,根据节点通信和信息融合的能耗,选择适合每个节点的融合结构,从而最大程度地降低整个网络时空融合的能量消耗,并就该模型提出基于DS证据理论的多级时空融合算法。
1 无线传感器时空融合的结构模型
无线传感器网络通常由传感器节点、汇聚节点以及通信网络和应用管理中心组成,结构如图1所示。大量的传感器节点随机部署在检测区域内部或者附近,通过自组织的方式构成网络。传感器节点先采集检测数据,并对监测的数据进行预处理,同时将预处理的结果发送给汇聚节点,由汇聚节点对所有传感器数据进行融合处理,形成决策结果传输到用户管理中心。
目前研究和应用的时空融合的结构模型一般是两级时空融合模型。文献[3,4]采用单节点多测量周期和多节点单测量周期的融合模型。即先在每个节点对检测的时间序列进行融合,得到每个节点对目标的估计,然后,每个节点将时间融合后的估计结果发送给汇聚节点,汇聚节点对各个节点的估计结果进行空间融合,从而得到目标状态的最终结果。该模型虽然减少了通信量,但对于每个节点而言,需要在预处理的结果上,再进行一次时间上的融合判决,增加了每个节点的计算量,从而增加每个节点的计算能耗。
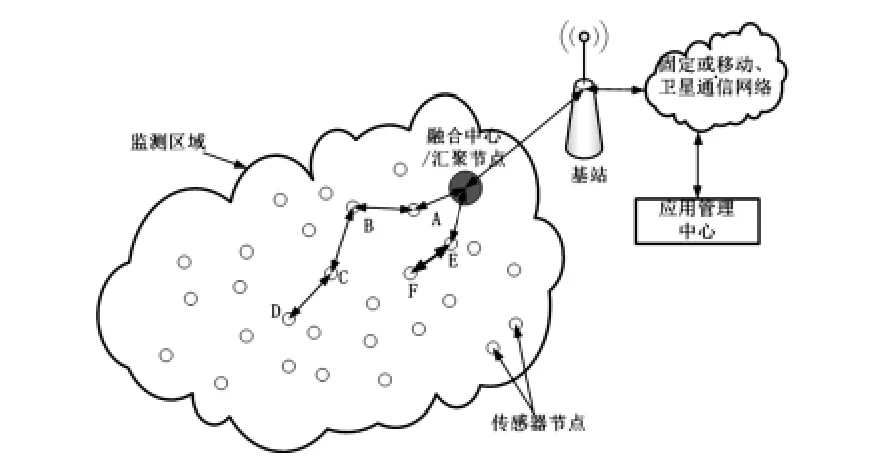
图1 无线传感器网络体系结构Fig 1 System architecture of wireless sensor networks
文献[5]采用多节点单测量周期融合和多节点多测量周期的融合模型。即先在同一时间对不同空间位置的各节点的观测值进行空间融合,空间融合是对传感器信息进行初步的分类,得到各个不同时间的观测目标估计,然后对不同时间的观测目标估计和决策信息按时间顺序进行时间融合。时间融合是对空间融合的再次融合。该模型中,单个节点不需要进行时间上的融合,减少了计算量,但由此提高了信息传输的频率。这个模型中,要求每个节点都要将预处理后的数据发送给汇聚节点进行空间融合。由于节点通信能力有限,且传输的距离和通信带宽都非常受限,距离汇聚节点较远的节点发送的数据需要经过多跳后路由到汇聚节点,从而增加了通信能耗。
针对以上2种模型无法解决无线传感器网络时空融合模型能耗最优的问题,本文提出了一种时间和空间混合的多级时空融合模型,如图2所示。当一个节点采用文献[3,4]的融合模型进行时空融合产生的能耗大于采用文献[5]的融合模型,则称该节点为近邻节点。在该模型中,近邻节点直接将预处理的估计结果发送给汇聚节点,由汇聚节点进行空间融合后进行时间融合;非近邻节点先在每个融合周期上进行时间融合,并将融合结果发送给汇聚节点;最后,在汇聚节点上将近邻节点的时空融合结果和非近邻节点的时间融合结果进行融合,得出最终的决策信息。在该模型中,通过比较不同的融合方式所产生的能耗,选择最优的融合方式,减少了非近邻节点因为多跳转发的次数和近邻节点时间融合增加的计算量,从而达到降低能耗的目的。
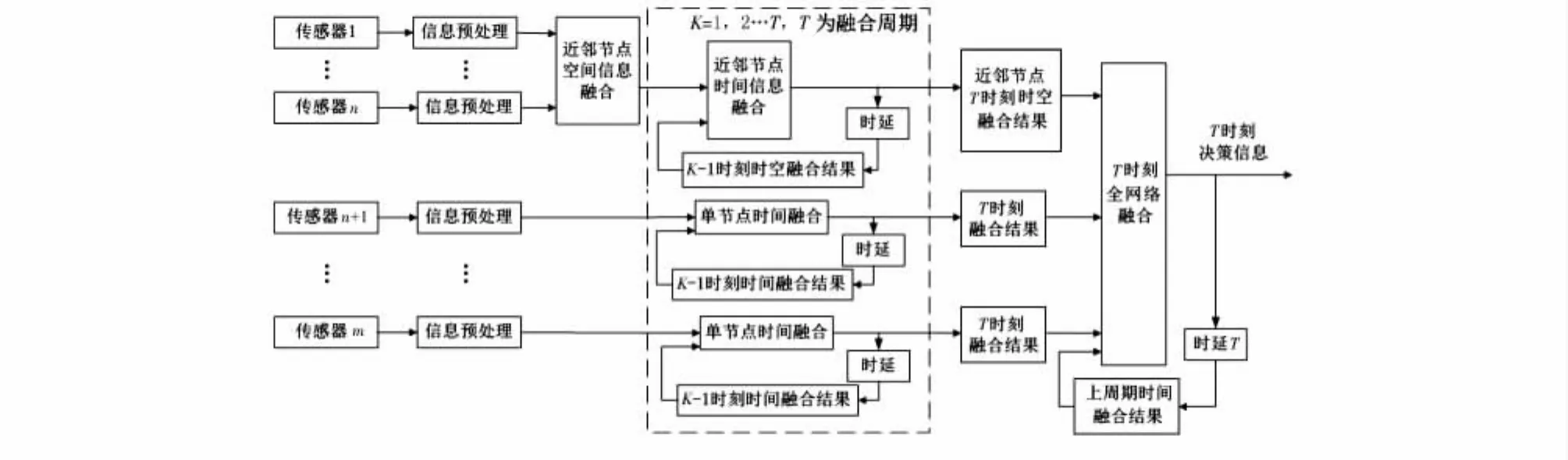
图2 无线传感器网络多级时空融合模型Fig 2 Multi-stage spatio-temporal fusion model of WSNs
2 基于DS证据理论的多级时空融合算法
2.1 融合算法的选择
目前研究的时空融合算法都基于文献[3,4]和文献[5]提出的两类模型,直接将原有的融合算法移植到多级混合时空融合模型将有可能会引起融合结果与原有的融合结果不一致,而且当无线传感器网络的节点状态发生变化,也有可能引起融合结果的不一致。为了确保融合结果的可靠性,且不会随着融合模型的变化而产生不一致的融合结果,多级时空融合算法的选择需要考虑以下两点因素:
1)选择与融合的顺序无关的算法,保证不同模式下时空信息融合结果的一致性;
2)选择具有容错能力,识别率、可靠性高的算法。
鉴于以上两点考虑,选择DS方法作为无线传感器网络混合时空融合的数据融合方法。可以证明,DS证据理论应用与多级时空融合算法,其融合结果与融合的顺序无关,并具有较强的处理不确定信息的能力,可靠性高[5~7]。
2.2 DS证据理论在无线传感器网络时空融合中的应用
在无线传感器网络信息时空融合中,由于传感器数量众多,数据量非常大,所以,可以采用由2个证据结合的计算递推得到的结构。假设:
1)无线传感器网络中有n个节点探测相同的目标;
2)时间融合的周期为T,即最终融合决策信息需要经过T次时间融合;
3)设第i只传感器第t时刻的测量值为mit,其中,i=1,…,n,t=1,…,T;
4)mi(1,T)表示第i个节点在一个融合周期内的时间融合结果;
5)m(i,k)(1,T)表示第i至k个节点在一个融合周期内的时空融合结果,其中,i≤k≤n。
最终融合决策信息的基本概率分配为
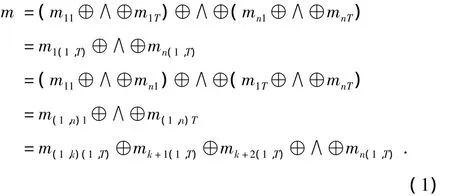
从式(1)可以看出:使用DS证据的融合算法,最终的融合结果与各节点时间—空间的融合顺序无关。将式(1)定义为基于DS证据理论的多级时空融合算法。
理想情况下,无线发射功率P和接收半径R之间的关系为P=R2。为了评估时空融合能耗与时空融合模型的关系,做以下设定:
1)节点接收半径为该节点到下一跳节点的距离;
2)节点发送信息基础能耗(接收半径R=1时)一致,且都为e1。
3)第i个节点将信息发送给汇聚节点需要经过Si(Si≥1)跳,即(Si-1)次转发,每一跳的节点发送信息的接收半径为Rij,其中,1≤j≤Si。
4)每个节点接收信息、算法判决的能耗都是一致的,分别为e2,e3。
节点采用文献[3,4]的融合模型,其融合周期内总能耗为

节点采用文献[5]的融合模型,其融合周期内总能耗为

在无线传感器网络多级混合时空融合模型中,本文提出了如下融合准则:
1)当E'i>E″i时,该节点为近邻节点,选择先空间再时间融合的方式进行时空融合;
2)当E'i<E″i时,该节点为非近邻节点,选择先时间再空间融合的方式进行时空融合;
3)当E'i=E″i时,2种方式的时空融合能耗相等,2种方式任选其一。
设无线传感器网络中有k个近邻节点,其中,k≤n,则基于DS证据理论的多级时空融合算法框架如图3所示。
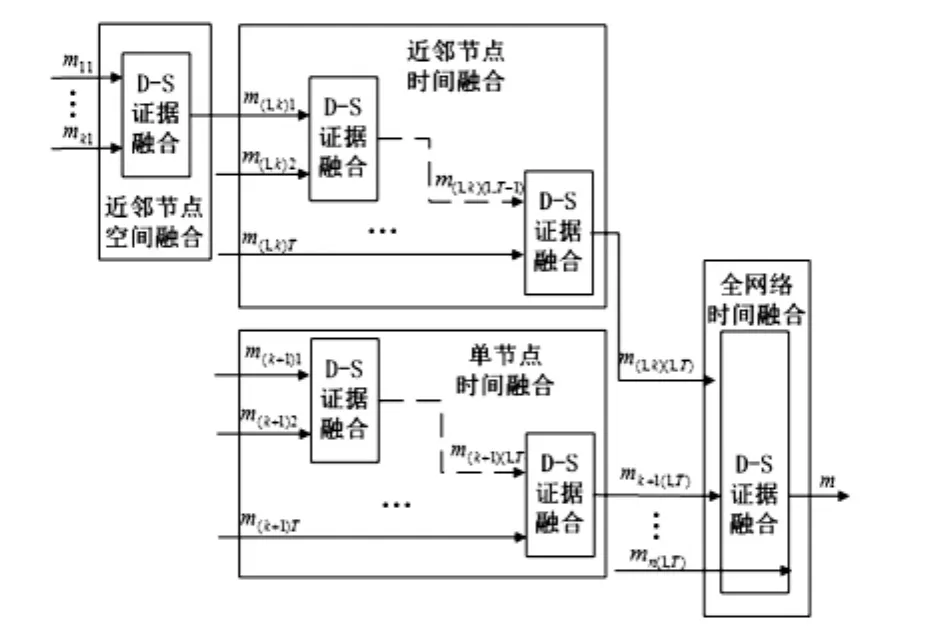
图3 基于DS证据理论的多级时空融合算法框架Fig 3 A framework of multi-stage spatio-temporal fusion algorithm based on theory of DS evidence
网络所有节点采用文献[3,4]、文献[5]以及本文所提出的融合模型进行时空融合,一个融合时间周期的总能耗分别为

与文献[3,4]和文献[5]的融合模型相比,多级时空融合算法节省的能耗分别为
3 应用举例
为了验证多级混合时空融合模型降低能耗的有效性,将多级混合时空融合模型应用如下无线传感器网络,并与文献[3,4]和文献[5]时空融合模型进行比较。
该无线传感器网络总计有10个节点,其e1,e2,e3分别为0.2 ×10-3,0.1 ×10-3,0.5 ×10-3J,融合周期T为 5,如图4所示。
根据式(2),式(3)分别计算节点采用不同融合模型进行时空融合的能耗,如图5(a)所示。根据多级混合时空融合模型的融合规则,得出采用该模型的能耗如图5(b)。使用文献[3,4]的融合模型一个融合周期的总能耗为27.568 ×10-3J,使用文献[5]的融合模型总能耗为30.272×10-3J,而使用多级时空融合算法,其总能耗仅为23.96×10-3J,大大地降低了时空融合的总能耗。

图4 节点分布示意图Fig 4 Distribution map of sensor nodes
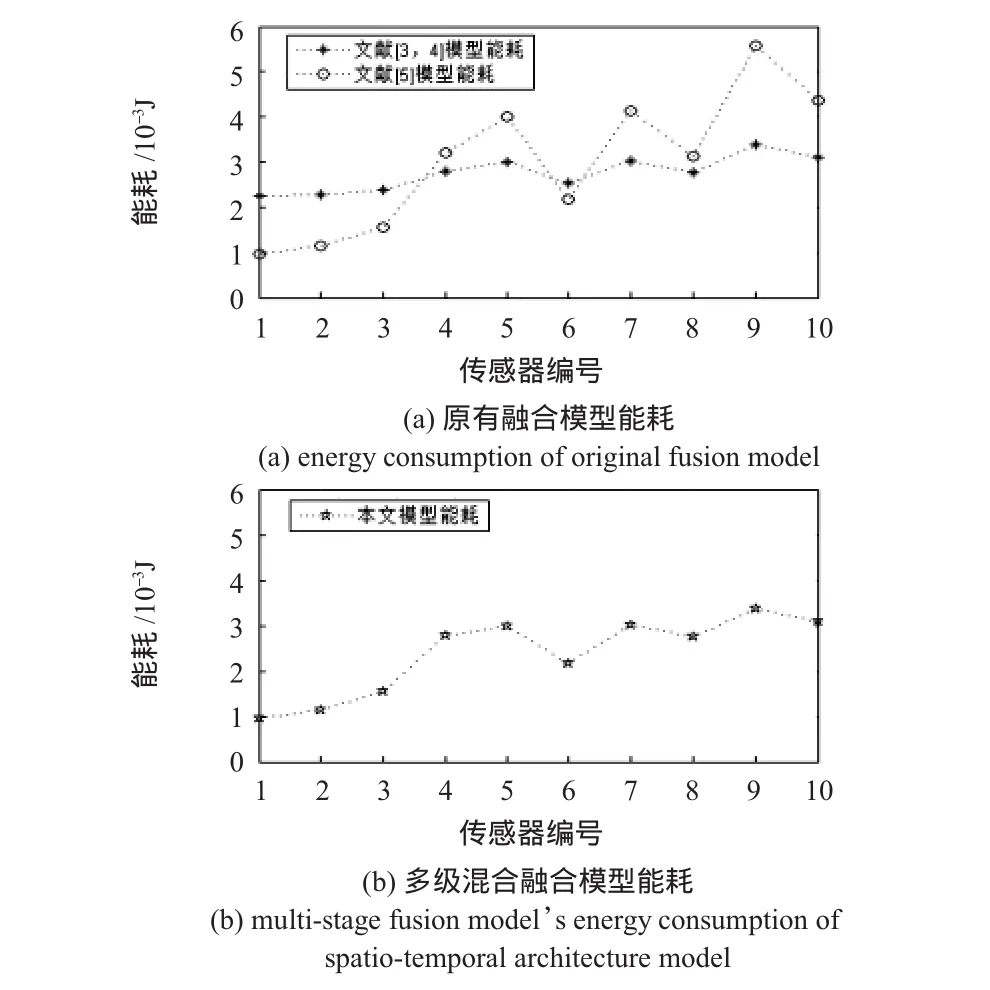
图5 三种融合模型融合能耗比较Fig 5 Comparison of fusion energy consumption of three kinds of fusion models
4 结论
本文从无线传感器网络的信息时间和空间的融合出发,提出了一种无线传感器网络信息时间和空间多级混合融合的结构模型,并就该模型提出了基于DS证据理论的多级时空融合算法。该模型能够结合节点在网络中所处的地理位置,采取不同的时空融合顺序,且不影响最终的融合决策结果。从数据分析结果可以看出:由于运用了多级时空融合,在保证系统识别率和性能的同时,大大地降低了节点的能耗,延长了网络寿命,为无线传感器网络解决资源受限提供了一种新的方法。
[1]Camteps S.A,Yener B.Key distribution mechanisms for wireless sensor networks:A survey[R].Rensselaer Polytechnic Institute,2005.
[2]孙利民,李建中.无线传感器网络[M].北京;清华大学出版社,2005:16-25.
[3]Li Meng,Dong Wei,Lü Bo,et al.Model of multi-sensor data fusion and trajectory prediciton based on echo state network[C]//International Conference on Computer,Control and Electronic Engineering,2010:338 -341.
[4]王杰贵,罗景清.多传感器基于证据理论的机载雷达用途识别[J].系统工程与电子技术,2002,24(6):49 -52.
[5]罗大庸,张 远.多传感器信息时空融合模型及算法研究[J].系统工程与电子技术,2004,26(1):36-39.
[6]蓝金辉,马宝华,蓝 天,等.D-S证据理论数据融合方法在目标识别中的应用[J].清华大学学报:自然科学版,2001,41(2):53-56.
[7]宋建勋,张 进,吴钦章.基于D-S证据理论的多特征数据融合算法[J].火力与指挥控制,2010,35(7):96 -98.
猜你喜欢
昆钢科技(2022年2期)2022-07-08
四川党的建设(2022年8期)2022-04-28
当代水产(2021年10期)2022-01-12
无线互联科技(2021年4期)2021-04-21
建材发展导向(2021年23期)2021-03-08
小学生学习指导(低年级)(2020年11期)2020-12-14
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
作文大王·低年级(2018年10期)2018-12-06
华人时刊(2018年15期)2018-11-10
