
非等齿耦合位移传感器的研究*
2012-07-25 05:35郭增强王先全袁亚辉
传感器与微系统 2012年2期
朱 革,郭增强,王先全,罗 静,袁亚辉
(重庆理工大学机械检测技术与装备教育部工程研究中心,重庆 400054)
0 引言
基于文献[1]中提出的“时空坐标转换”理论,设计了多种用于位移测量的时栅位移传感器,包括测量角位移和直线位移的传感器,并且取得了一定的成果。前期研究的时栅位移传感器经中国测试计量研究院测试,32对极可达±0.8″,24 对极可达 ±1.0″[2]。通常,传感器的空间刻线槽越多,极对数越多,空间刻划越细,传感器的精度就越高,但是增加开槽数就增加了加工难度。基于这种现状在时栅位移传感器的基础上进行改进,旨在不增加最大开槽数的前提下获得更多的极对数和测头数,从而利于提高测量的精度[3]。
1 非等齿耦合位移传感器的原理
由于提出的这种结构是在时栅位移传感器基础上的改进,故其原理和时栅相似,采用控制电机型的线圈绕组结构,利用定子和转子的线圈绕组的互感随位置而变化的电磁感应原理,将机械转角精确地转换成电信号。所不同的是提出了转子绕组激励,定子绕组绕线槽间距为电气角度非常规300°的三相感应输出的新结构,这样其极对数为n/2(一周槽数n),测头数为3n/5,从而使极对数和侧头数增多[4]。
通过给传感器的激励绕组施加余弦激励信号(E=Emcosωt),在感应绕组上形成包含空间角度α和激励信号频率ω的感应信号

通过比较激励信号和感应信号的相位差α,实现位移(或角度)的检测[5]。
图1是两相非等节距时栅位移传感器的信号模型示意图。在5个周期内,它有均匀分布的6个测头,每个测头间电气角度为300°。传感器在E=Emcosωt信号的激励下,其感应信号为
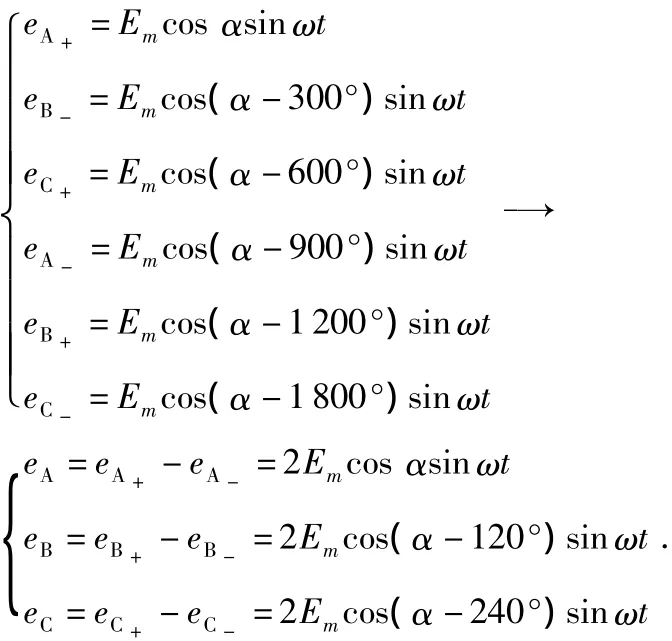
将闭合线圈A,B,C的感应电动势分别在时间上延迟0°,120°,240°,然后叠加,即

所得感应信号是与激励信号同频率的正弦信号。可以通过鉴相,检测位移[6]。

图1 非等齿时栅传感器的信号模型图Fig 1 Signal model of time grating sensor with unequal-tooth
2 非等齿耦合位移传感器的结构
为了在不增加最大开槽数的条件下得到更多的极对数,本文提出了非等齿耦合位移传感器的结构,如图2,(考虑传感器对材料导磁性,剩磁的要求和加工工艺及经济性,采用45钢作为定转子的材料),在转子和定子上分别均匀开取一定数目的槽,在转子上绕制连续的一相绕组,定子上绕制三相绕组;在转子上施加余弦激励,当转子随转台转动时,一个对极内在转子周围形成5个周期的正弦磁场,如图3。由于电磁感应作用,在定子的感应线圈上就会产生相应的三相感应信号,通过上述的信号调理过程,将感应信号叠加成为可用于测量的感应信号E=Emsin(ωt-α)[6]。
该传感器结构的特点是,定子和转子分别均匀开槽,定子槽距和转子槽距分别相等,定子槽距是转子槽距的5/3倍,定子槽数是转子槽数的3/5倍。

图2 非等齿耦合位移传感器的结构Fig 2 Structure of the displacement sensor with unequal-tooth coupling

图3 传感器的展开示意图与磁场沿空间分布Fig 3 Unfold illustration of sensor and magnetic-field distribution
此种结构在最大开槽数相同时与其他电磁感应传感器相比获得的极对数和测头数是不同的。在最大开槽数一定的情况下,非等齿耦合位移传感器的极对数可以达到感应同步器采用印刷电路式的极对数,并且测头数要比感应同步器多。故在同一直径的圆上,加工最大开槽数相同,非等齿耦合位移传感器可以得到较多的极对数和测头数。
3 实验测量结果
待标定传感器最大开槽数为360(定转子槽数分别为216,360)。以高精度光栅为基准,传感器和光栅通过转台的中心轴相联接,传感器和光栅的外壳固定在机架上。当转台转动时,光栅和传感器以同样的角度转动[5,6]。利用光栅作为标准,每转一个角度,分别读出光栅和传感器的角度值,两者的差值就是传感器的误差(本实验取一对极内0°~10°,每 0.2°取一个点)。多次测量,取一组误差数据:
(5.9,-1.5,6.0,- 1.7,5.9,- 2.2,6.5,- 2.5,6.3,-3.1,6.1,-5.1,4.9,-4.7,4.1,- 3.8,5.2,- 3.3,4.3,-2.2,3.0,-3.2,4.8,- 5.1,4.2,- 5.5,3.7,- 5.3,3.3,-6.3,2.7,-5.0,1.3,- 4.2,2.2,- 4.9,2.1,- 3.2,2.7,-5.0,1.3,-4.2,2.2,- 3.4,1.5,- 3.2,1.3,- 3.6,1.8,-2.9),利用工具软件对误差数据处理得到传感器的角位移误差曲线如图4所示。可见传感器的角位移误差在±6.5″。而最大开槽数为360(定转子槽数分别为360,120)的三相时栅的角位移误差在±4″,拟合后的误差在±0.8″。
由于实验采用的信号处理电路是基于三相时栅的信号处理电路,故其精度与时栅相比有一定差距。
4 结论
通过上述实验和分析表明:该传感器可以在不增加最大开槽数的情况下最大限度增加极对数和测头数,达到感应同步器采用印刷电路式的极对数,从而利于提高测量精度。另外,在相同直径的圆周上,最大开槽数相同时非等齿耦合位移得到的极对数和测头数要多的多。

图4 测量误差Fig 4 Measurement error
虽然目前精度较三相时栅位移传感器偏低,但通过优化信号处理电路和其他参数优化改进,可以得到比时栅更高的测量精度,具有一定的研究前景。
[1]彭东林,刘成康.时空坐标转换理论与时栅位移传感器研究[J].仪器仪表学报,2000(4):340-342.
[2]彭东林,张兴红,刘小康,等.场式时栅位移传感器研究[J].仪器仪表学报,2003,24(3):329 -331.
[3]李 谋.位置检测与数显技术[M].北京:机械工业出版社,1993.
[4]胡虔生,胡敏强.电机学[M].北京:中国电力出版社,2009.
[5]陈锡侯.新型时栅位移传感器研究[D].重庆:重庆大学,2007:44-47.
[6]王先全,吴 敏,彭东林,等.两相非等节距时栅位移传感器[J].西南大学学报:自然科学版,2009,31(5):162 -167.
[7]强锡富.传感器[M].2版.北京:机械工业出版社,1994.
猜你喜欢
数学物理学报(2022年2期)2022-04-26
新世纪智能(数学备考)(2021年9期)2021-11-24
湖北畜牧兽医(2021年11期)2021-02-23
新世纪智能(数学备考)(2020年9期)2021-01-04
电脑报(2020年19期)2020-06-30
浙江畜牧兽医(2020年3期)2020-06-22
中学生数理化·高一版(2018年10期)2018-11-08
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
物理与工程(2014年4期)2014-02-27
