
基于减速电机的微量药物输送系统的研制
2012-07-25 05:36侯雅萍吕坤勇谷雪莲
传感器与微系统 2012年2期
侯雅萍,吕坤勇,谷雪莲
(1.上海理工大学医疗器械与食品学院,上海 200093;2.上海微创生命科技有限公司,上海 201318)
0 引言
微量药物输送装置主要应用于麻醉剂、治疗肿瘤用的止痛药物、生长激素类药物、胰岛素等药物的微量注射,从而达到精确控制药量、保证治疗效果、保障患者安全的目的[1]。相对于普通药物输送,微量输送对系统的精度、可靠性等要求更高,同时还应考虑系统的功耗、价格以及便携性[2]。目前,国内外微量药物输送装置面临的主要问题是精度不够和成本较高[3]。临床上常见微量药物输送装置多采用步进电机作为驱动,价格较高,步进电机产生的微小抖动、噪音大、耗电量大等缺点会导致药量控制的误差,不适于大批量产业化的生产[4]。本文阐述了一种以直流电机为驱动原件的微量药物输送装置的研制,此装置实现了药量的微量精确控制,同时兼具整体尺寸小、价格低廉等优势,适于此类产品的微型化。
1 输注系统设计
1.1 总体基本组成
输注系统由直流电机、驱动机构、控制系统、储液器等机构组成,如图1所示。
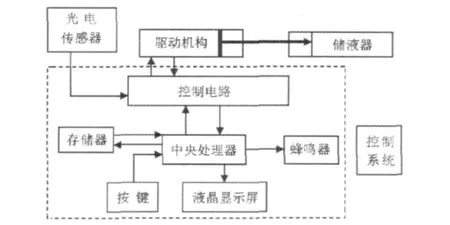
图1 输注系统基本组成示意图Fig 1 Schematic diagram of drug delivery system
按键与液晶显示器构成人机交换的输入与输出;存储器用来储存输注记录与时间;蜂鸣器在系统出现液尽、低电等异常情况时发出警报。通过操作按键,进行输出剂量的设置、输注记录的查询及工作情况查询。在操作按键的同时,液晶显示屏同时有相应的指示信息。
驱动机构是由直流电机、光电传感器、减速齿轮箱、丝杆等组成。输注机构的作用是将直流电机的旋转运动转变成直线运动,并且用大的减速比提高输注机构的扭矩,以满足推动储液器活塞排出药液的力矩要求。光电传感器用于计量电机旋转的圈数,通过计算可以得到输出药液的量与电机圈数的关系。
1.2 驱动机构
驱动机构采用直流电机驱动齿轮箱,通过齿轮箱的最终齿轮与丝杆的配合,将齿轮的旋转运动转化成直线运动。图2是驱动机构的示意图。
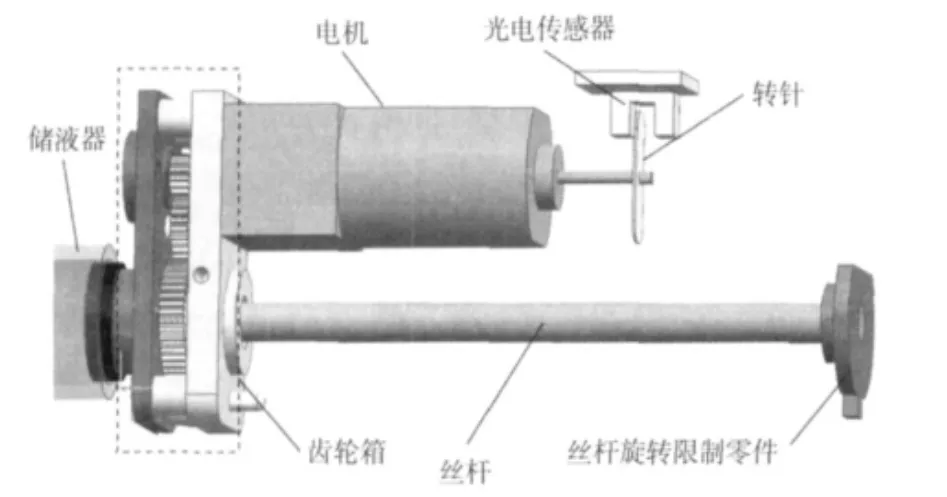
图2 驱动机构示意图Fig 2 Schematic diagram of driving mechanism
齿轮箱由3个齿轮和两侧夹板构成,3个齿轮相互啮合。电机通电后,电机带动与其输出轴相配合的齿轮箱第一齿轮,由于齿轮的啮合作用,相继带动齿轮箱的中间齿轮和最终齿轮转动。
丝杆通过螺纹配合穿过最终齿轮,丝杆的尾部固定一个丝杆旋转限制零件,当最终齿轮旋转时,丝杆能够沿其轴向进行往复运动。丝杆的前端安装有推板,推板随丝杆的往复运动,可以推动储液器的活塞,将液体排出储液器,完成输注。
除此之外,系统还包含用于固定用的螺钉螺母,与丝杆相配合的定位装置。
1.3 直流电机计圈方式与计算
1.3.1 光电传感器的原理
本系统采用直射式光电传感器检测电机转动的圈数,通过对红外发射光的阻断和导通,在接收端感应到电流的变化,从而来实现开与关的判断[5]。光电传感器检测电机尾部转针转动的圈数,电机转过一圈,转针随之转动一圈,阻断光信号两次。因此,通过单片机检测阻断光信号的次数,即可算电机转动的圈数。
1.3.2 药物输注的计算
直流减速电机是很常见的一种电机,它由直流电机和减速齿轮箱构成,通常减速比可达几百比一甚至更高[6]。本系统采用的是ZXD—FF—N20电机,减速比记为n1。自主设计的齿轮箱减速比为n2,设计齿轮箱的目的一是为了增加减速比,二是为了将丝杆与电机平行放置,缩短装置的长度。与齿轮箱的最终齿轮相配合的丝杆螺距为p。因此,丝杆前进的距离(l)与电机转动的圈数(Rmotor)的关系如公式(1)所示[7]

假设储液器的内径是d,则注射的药物的量(V)与电机转动的圈数的关系式如公式(2)所示

根据对光电传感器的介绍,可以知道单片机检测到一次阻断信号,电机转动半圈。因此,注射药物的量与单片机检测到的阻断信号数(N)的关系如公式(3)所示

2 实现方法
2.1 零部件加工与组装
系统组装过程中所用的齿轮利用线切割加工而成,所用材料为黄铜或不锈钢。其余零部件用雕刻机加工而成,所用材料为有机玻璃。按照图2所设计的结构,用螺钉螺母安装固定。图3是装配完成的装置图,装置通过光电传感器引出的线与PCB板相连,PCB板在这里没有给出。
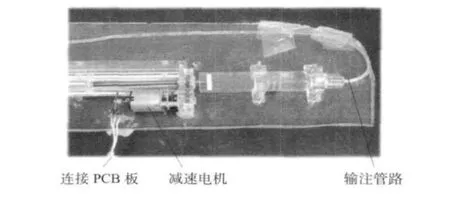
图3 药物输送系统Fig 3 Drug delivery system
2.2 软件实现方法
系统采用MSP430F149单片机控制,药物输送程序实现如下:操作者通过按键设置所要输注剂量,所设置的剂量可以在液晶显示器上反映出来;控制程序根据所设置的预设量,依照公式(3)计算出需要转针阻断光电传感器的次数N;当操作者按下执行以后,单片机启动电机,同时开始监测并记录转针阻断光电传感器的次数,当阻断次数达到N后,停止电机供电,完成一次输注,并将输注记录与实际阻断次数存储起来,供查询。
3 实验与分析
3.1 系统的精确性测试实验
为了验证药物输送的准确性,在软件中增加了记录转针阻断光电传感器次数的程序。采用微量天平称量系统输注出的液体的质量,除以液体的密度即可以得到液体的体积,实验中采用蒸馏水做输注介质。最终结合理论计算,验证系统的精确性。本实验所用到的一些参数主要有:n1=298∶1,n2=3∶1,p=0.5 mm,d=9.65 mm。表 1 记录了分别输注0.05~0.4 mL 液体的实际输注量(间隔 0.05 mL),理论值与误差。
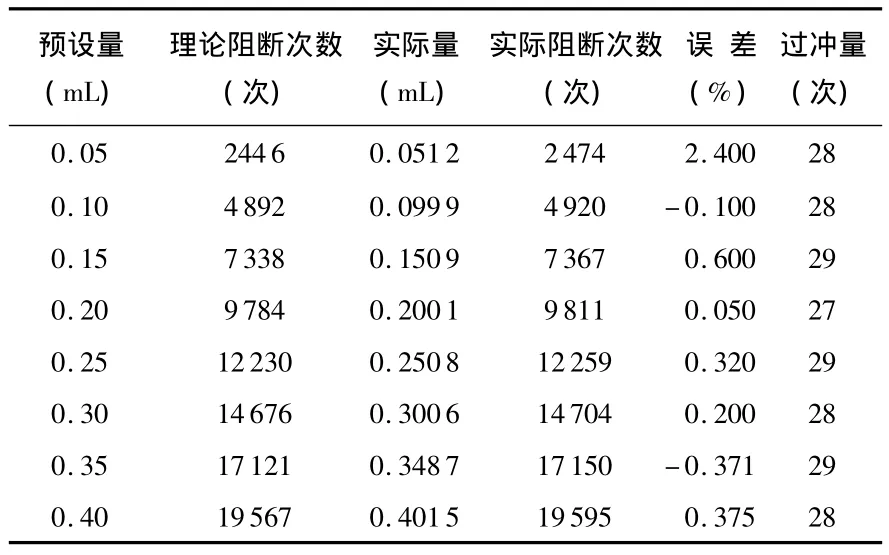
表1 实验结果Tab 1 Experimental result
从表1中可以看出:实际测试的液体的量大都比预设量大。通过监测转针阻断光电传感器的次数(如表1第4列),可以得知实际阻断次数比理论阻断次数要大。在程序控制时,单片机监测到转针转动次数达到理论值时,开始断电,但是断电后电机会继续转动一会,这是由于惯性所引发的过冲。过冲量如表1最后一列所示,大约为28次,即过冲14圈。
根据这个数据,可以通过修改程序,补偿因电机过冲所引起的药物输送误差。具体作法是,当转针转数达到光电传感器理论次数减去28的数值时,即停止电机供电,由惯性来补偿剩余部分。
关于系统的误差问题,可以通过表1中实际阻断次数计算出理论输注量,用其与实际量相比即可,输注误差为-0.68%~1.24%。
3.2 系统稳定性测试实验
为了验证系统的稳定性,实验将系统的预设值固定在0.1 mL,将储液器里的液体依次排出,储液器容量3mL,为了保证数据的有效性,记录25个数据。每天测试一组,持续5d进行。测试结果如图4所示。
其中,最大值为 0.1048 mL,最小为 0.0996 mL,平均值为0.101 9 mL。根据这些数据计算出系统输注量为0.1019 mL时的精度在 -2.3%~2.9%。连续 5 d的输注结果无序地分布在0.1019 mL附近,系统的精度与稳定性都比较理想。

图4 系统稳定性测试曲线Fig 4 Test curve of system stability
4 结论
本文提出一种药物输送系统,阐述其基本组成与实现方法,并进行了实验研究。通过实验验证,该系统在一定范围内输注和固定量输注时均有很好的精度,且稳定性很高,易于应用在临床或微型药物输送器械。
同时,实验表明:本系统存在电机过冲现象,虽然文中提出了一种修正补偿的方法,但尚存在风险,如果输注阻力不同,电机断电后的过冲量可能会有所不同。另外,在极微小量的药物输送应用方面还存在风险,输注极微小量的药物时,电机只需转动几十圈甚至几圈,在电机还没有达到其额定转速时就已经完成了预设量的输注,此时断电所引起的过冲量又是一个不同的值。该系统需要进一步的完善,确保其实际应用的安全性。
[1]Hartley F T.Miniature peristaltic pump technology and applications[J].Journal of Advanced Materials,2000,32(3):16 - 22.
[2]王恩刚.人体便携式自动输液器的研制[D].哈尔滨:哈尔滨工业大学,2006.
[3]黄丹飞.医用微量注射仪的研究[D].长春:长春理工大学,2004.
[4]藏 庆,王琪民.胰岛素泵的研究及其对人工胰腺发展的展望[J].国外医学:生物医学工程分册,2005,28(2):98 -102.
[5]杨 燕.各种光电传感器的不同应用方式[J].可编程控制器与工厂自动化,2009,2(6):44 -48.
[6]朱立圣.直流电机闭环控制技术研究[D].哈尔滨:哈尔滨工业大学,2010.
[7]朱孝录.齿轮传动设计手册[M].北京:化学工业出版社,2010:325-330.
猜你喜欢
大电机技术(2022年5期)2022-11-17
橡塑技术与装备(2022年10期)2022-10-03
有色金属材料与工程(2021年4期)2021-11-27
装备维修技术(2020年4期)2020-11-23
科学与财富(2020年24期)2020-10-27
家庭医药·快乐养生(2018年9期)2018-09-27
恋爱婚姻家庭·养生版(2018年12期)2018-01-15
电子制作(2017年1期)2017-05-17
文体用品与科技(2016年5期)2016-04-08
淮南师范学院学报(2015年3期)2015-03-22
