
架控制动系统可靠性模型研究
2012-08-03 03:19朱士友
铁道机车车辆 2012年3期
朱士友
(广州地下铁道总公司,广东广州510310)
随着计算机技术和网络技术的发展,我国城市轨道车辆制动系统20世纪90年代后均采用了微机控制的直通式电空制动系统。城市轨道交通车辆由于停车频率高,停车精度要求高,微机控制直通电空制动机由于具有良好的运算与控制性能而得到了广泛的应用。从制动力控制的对象上,制动系统在以车辆为控制单元的制动控制系统(简称车控)基础上,又产生了基于转向架控制的制动系统(简称架控)。国外轨道交通制动企业相继推出了各自的架控制动机,特别是以Knorr公司的EP2002为代表。同时随着轨道交通装备自主创新步伐的加快,2009年3月中国铁道科学研究院机车车辆研究所研制具有完全自主知识产权的架控制动系统EP09,并在广州地铁3号线北延段列车上装车应用。由于行车密度大和单向载客能力大,使得架控制动系统的可靠性成为至关重要的问题。
建立可靠性模型是可靠性研究的基础,根据系统特点,可以有多种可靠性建模方法,如可靠性框图、网络可靠性模型、故障树模型、事件树模型、马尔可夫模型、Petri网模型、GO图模型等[1]。为预计或估算产品的可靠性所建立的可靠性方框图和数学模型成为可靠性框图模型,它是对系统方案进行比较优化方案分析最直观和通用的方法,得到了广泛的应用。拟以国产架控制动系统为例,探讨用可靠性框图法建立系统可靠性模型的方法,为提高架控制动系统的可靠性提供参考。
1 制动系统结构分析
广州地铁3号线北延段列车为6辆编组,采用由2个动力单元组成的6辆编组列车,-A+B+C=A+B+C-。其气路和制动系统由供风装置、辅助控制装置、制动控制装置、基础制动装置、升弓装置、悬挂装置和联挂装置等组成。其中与制动功能最为密切的是供风装置、制动控制装置和基础制动装置,由于可靠性框图法是一种仅考虑最主要因素的粗线条描述工具,因此本文将制动系统抽象为由上述3个装置构成。
国产制动系统的供风装置主要由两台空压机(Air Co mpressor,简称AC)组成,采用螺杆式空气压缩机,可以连续工作且噪声更低。两台空压机互为冗余,均可单独为制动系统提供充足的风源。
制动控制装置是制动力的计算和控制的核心装置,它根据制动指令和车辆载荷产生相对应的制动控制气压值。广州3号线北延段采用架控方式,每个转向架具有1个架控制动控制装置(BCU),全列共有12个BCU。
基础制动装置是制动的执行机构,它将BCU输出的气压值转换为制动摩擦力。广州3号线北延段的基础制动装置选用盘形制动单元(Disc Brake Unit,简称DBU),每个转向架有4个DBU,其中有两个具有停放制动功能,对常用制动功能来讲,工作机构和原理一样,可以认定常用制动功能的可靠性指标一样故将其统称为DBU。
从以上分析可以看出,制动系统各部件从功能上可分为供风子系统(Air Suppl y Subsystem,简称ASS)和架控制动子系统(Bogie-base Brake Subsystem,简称BBS),系统功能分解如图1所示。

图1 制动系统功能分解
2 制动系统故障判据
对于制动系统,其任务是“使列车减速或阻止其加速”[2],使列车产生预定大小的减速度。空气制动系统的任务流程是首先由供风装置产生压缩空气,压缩空气作为制动的原动力经制动控制装置进行计算和转换,然后由基础制动装置将其转换为制动力,如图2所示。

图2 制动系统任务流程
空气制动通常由盘形制动承担,属于黏着制动,制动力的发挥受轮轨间黏着的限制。虽然制动系统功能的发挥受多种因素的影响,例如轮轨间的黏着系数、制动盘的热容量以及制动功率。但热容量和制动功率为制动系统的内部限制,是可以通过制动系统的设计来进行选择和控制的。而轮轨黏着属于线路制动系统的外部环境,对制动系统来说是不可控的。因此,制动系统的故障判据要从轮轨间的黏着限制入手进行分析。
国内的黏着系数曲线如图3所示[3],其中干轨的黏着系数以μ_d(v)表示,湿轨的黏着系数以μ_w(v)表示,基准黏着系数通常按湿轨黏着系数上浮20%计算,以μ_s(v)表示。

图3 国内的黏着系数曲线
根据国内的黏着系数曲线,结合广州3号线的线路特点与气候条件,以0.15作为制动系统的最低设计黏着系数,记为μ0。对于黏着制动,黏着系数是制动减速度的主要限制条件。最大黏着对应的列车制动减速度a0为:

根据用户需求,列车需要的常用制动最大减速度a sb为1.0 m/s2,设最少需要n0个转向架均达到黏着允许的最大制动减速度,才能满足全列12个转向架的制动需求,得到最少转向架单元数:

从以上计算可以看出,制动系统在黏着限制条件下,12个转向架中至少需保证8个转向架功能正常才能使列车获得需要的制动减速度。由此得到制动系统的故障判据为“5个或更多转向架制动功能故障”,并以此作为建立制动系统可靠性模型的依据。
3 制动系统可靠性模型
3.1 子系统可靠性模型
根据广州3号线北延段制动系统耗风量计算[4],单台空压机(AC)可满足制动系统的用风需求。因此,全列两台空压机中正常工作的空压机数不小于1,即可保证供风正常,因此两台空压机构成的供风子系统的可靠性模型为1/2(G)表决结构,如图4所示。
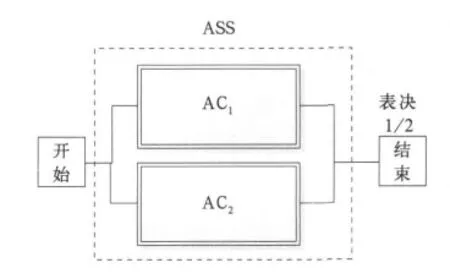
图4 供风子系统可靠性模型
在工程应用中,可认为制动系统部件的可靠度是时间的函数,假设空压机的寿命服从故障率为λAC的指数分布,则供风装置的可靠度RASS(t)为:

式中表示从2个不同元素中取出i个元素的组合数,下同。
每个转向架的4个盘形制动单元(DBU)都进行了降额设计,在制动能力上具有冗余。但考虑到制动力具有对称性要求,单个DBU故障可能造成转向架两侧制动不均匀,因此要求4个DBU功能均正常,任何一个发生故障均会导致FBR功能不能实现,即它们为串联结构。如图5所示。
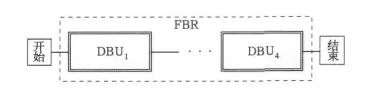
图5 基础制动装置可靠性模型
设单个DBU的故障率为λDBU,根据串联结构的可靠性模型,得基础制动装置(Foundation Brake Rigging,简称FBR)的故障率λFBR为:

对于架控制动单元(Bogie-based Brake Unit,简称BBU)来说,转向架制动力的发挥需要BCU和FBR均正常,任何一方有故障都会导致BBU的故障,因此两者为串联结构,其可靠性模型如图6所示。

图6 架控制动单元可靠性模型
设单个BCU的故障率为λBCU,根据串联结构的可靠性模型,得BBU的故障率λBBU为:

根据前述对制动系统故障判据的分析,全列车的12个架控制动单元中,正常的单元数不小于8个时,系统就不会发生故障。
列车电空制动力的配合有两种方案,即在全列车12个转向架之间进行配合的全列混合方案,以及制动力在每个A、B和C车构成的单元中进行混合的单元混合方案。本文分别对这两种方案进行可靠性建模。
对于全列混合方案,BBU1……BBU12为1个制动力分配单元,其中BBU1和BBU12包含网关阀制动控制单元,负责从全列车制动指令的接收以及全列车电空制动力的分配,两者互为冗余,需至少1个完好。BBU2、BBU3……BBU11计算自身需要的制动力并进行制动控制,根据故障判据,需至少7个完好。因此,全列混合的可靠性模型如图7所示。
根据混联结构的可靠性模型,得全列混合架控制动子系统(简称BBS_T)的可靠度为:

图7 架控制动子系统电空全列混合可靠性模型

对于单元混合方案,BBU1,……,BBU6为1个制动力分配单元。其中,BBU1和BBU6均包含网关阀制动控制单元,负责从全列车制动指令的接收以及全列车电空制动力的分配,两者互为冗余,需至少1个完好。BBU2、BBU3、BBU4和BBU5计算自身需要的制动力并进行制动控制,根据故障判据,及车辆对称性原则,需至少3个完好。BBU7,……,BBU12与BBU1,……,BBU6对称,可靠性模型相同。单元混合的可靠性模型如图8所示。
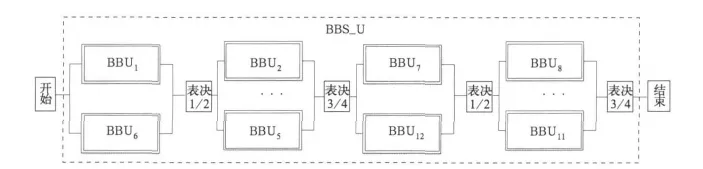
图8 架控制动子系统电空单元混合可靠性模型
根据混联结构的可靠性模型,得单元混合架控制动子系统(简称BBS_U)的可靠度为:

3.2 系统可靠性模型
根据前述分析,列车制动系统由供风子系统ASS和架控制动子系统BBS构成。在子系统可靠性模型的基础上,即可以建立列车制动系统的可靠性模型。
制动功能的发挥需要供风子系统能够正常提供系统所需的压缩空气,同时需要架控制动子系统能够产生合适的制动驱动力,任何一个子系统的故障都会导致系统故障。因此,上述两个子系统为串联结构,制动系统可靠性模型如图9所示。

图9 制动系统可靠性模型
根据串联结构的可靠性模型,得广州3号线北延段制动系统采用电空全列车混合方案时的可靠度RS_T(t)为:

同理可得广州3号线北延段制动系统采用电空单元混合方案时的可靠度RS_U(t)为:

按照可靠性工程的常规要求,在广州3号线北延段车辆能够积累充分的可靠性运营数据之前,对国产电子部件采用 GJB/Z 299B—1998[5],对进口电子部件采用MIL—HDBK—217F[6],对机械部件采用 NPRD1991[7],并根据同类产品的实际运用情况修正后,得到制动部件的故障率数据如表1所示,故障率的单位FIT表示每109h发生的故障次数。
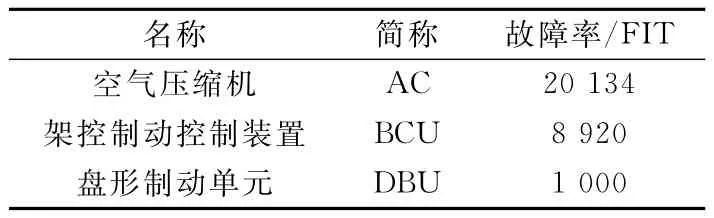
表1 制动系统主要部件故障率数据
将上述故障率数据代入式(3)~式(9),进行仿真计算后得到电空全列车混合和单元混合的可靠度曲线如图10所示。

图10 全列车混合与单元混合制动系统可靠度曲线
根据可靠性工程中平均故障间隔时间TBF与R(t)的关系:

计算获得全列车混合制动系统的平均故障间隔时间TBF_T为:

同理,可得单元混合制动系统的平均故障间隔时间TBF_U为:

进口架控制动系统在广州地铁3号线RAMS计算中,通常假定制动系统及部件每年的运营时间为3 000 h。按此折算,国产架控制动系统的平均无故障工作时间分别为约10年和7年。广州地铁的架修期为6年,架修时将对制动系统主要部件进行大修或更换。因此,国产架控制动系统无论采用电空全列车混合或单元混合方案,均能满足运营需求。鉴于全列车混合的系统平均故障间隔时间大于单元混合,在同等条件下推荐全列车混合方案。
4 结束语
从可靠性模型的计算过程可以看出,制动系统的平均故障间隔时间TBF与部件的可靠性指标和系统结构设计密切相关。前者可以从改进部件加工工艺、完善质量保证体系入手,后者可以从严格执行设计验证和设计确认环节,完善设计评审制度予以保证。
以广州地铁3号线北延段所用架控制动系统为研究对象,从轮轨间黏着入手,分析了制动系统的冗余结构与故障判据。建立了供风子系统和架控制动子系统的可靠性模型,以子系统的可靠性模型为基础,分别搭建了电空全列车混合与单元混合时制动系统的可靠性模型。借助制动系统的可靠性模型,进行了制动系统的可靠性分析,为制动系统方案选择、优化和可靠性分析与优化提供了参考。
[1]曾声奎,赵廷弟,等.系统可靠性设计分析教程[M].北京:北京航空航天大学出版社,2001.
[2]张开文.制动[M].北京:中国铁道出版社,1981.
[3]中华人民共和国铁道部.TB/T 1407-1998列车牵引计算规程[S].
[4]广州地铁三号线制动计算和耗风量计算V2[R].中国铁道科学研究院机车车辆研究所,2010.
[5]GJB-Z 299B-1998.电子设备可靠性预计手册[S].中国人民解放军总装备部,1998.
[6]MIL-HDBK-217F.RELIABILll Y PREDICTION OF ELECTRONIC EQUIPMENT[S].DEPART MENT OF the AIR FORCE,1991.
[7]MIL-HDBK-217F.RELIABILll Y PREDICTION OF ELECTRONIC EQUIPMENT[S].DEPART MENT OF the AIR FORCE,1991.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
铁道通信信号(2020年3期)2020-09-21
哈尔滨铁道科技(2020年4期)2020-07-22
制造技术与机床(2019年12期)2020-01-06
电子制作(2018年23期)2018-12-26
铁道通信信号(2018年8期)2018-11-10
西南交通大学学报(2018年5期)2018-11-08
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年2期)2017-05-17
电子制作(2017年2期)2017-05-17
