
微型燃气轮机发电系统孤岛及并网运行的建模与控制策略
2012-08-07 08:13臧海洋
电工技术学报 2012年1期
杨 秀 郭 贤 臧海洋 郭 贺
(1.上海电力学院电力与自动化工程学院 上海 2000902.上海交通大学电子信息与电气工程学院 上海 2002403.上海发电设备成套设计研究院 上海 200240)
1 引言
随着经济社会的不断发展,分布式发电技术以其高效、节能、环保的显著优势,越来越受到人们的广泛关注。其中,微型燃气轮机(Micro-Turbine,MT)作为分布式发电能源的典型代表,不仅可以输出恒定的功率,具有其他新能源所难以比拟的独特优势,且发展时间早、技术上更为成熟,因而有着更为广阔的商业应用前景[1]。
微型燃气轮机(MT)一般是指功率在几十kW到几百kW的燃气轮机。按照动力涡轮和发电机是否同轴,可以分为单轴和分轴两种形式,为了简化分析,本文以单轴微型燃气轮机为研究对象,其主要由燃气轮机、压气机、燃烧室、回热器、发电机组成[2]。微型燃气轮机发出的中压中频的交流电必须经过大功率电力电子器件变换后,输出额定电压为 380V的工频交流电,可直接供给负荷使用,这样就形成了典型的微型燃气轮机发电系统(MTGS),其结构框图参见文献[3]。
为了研究MTGS的相关问题,国内外相关学者进行了一系列建模的探究[3-6]。Rowen[4]建立了典型的机电一体化仿真模型,实现了系统间的协调控制设计。文献[5]基于MTGS各个主要组成部分的工作原理,建立了系统的数学仿真模型,并进行了仿真实验。但数学模块建立的模型较为繁琐,且难以实现与微网等其他系统的灵活连接,不便于孤岛及并网运行策略的研究,所以本文中对于发电机和电能变换部分均采用了Matlab/Simulink中的现成模块,以建立MTGS的仿真模型,进一步实现孤岛及并网控制策略。
2 微型燃气轮机发电系统的模型
2.1 微型燃气轮机
本文中的微型燃气轮机是基于W.I.Rowen提出的单轴单循环的重型燃气轮机,控制系统主要包括转速控制、温度控制和加速度控制三个方面。其中,转速控制使得微型燃气轮机在一定负荷时维持转速基本不变,而温度控制保证了透平的入口温度不至于过高,影响到透平的安全性和系统的寿命,加速度控制则主要是用于机组的启动过程。其整体仿真模型如图1所示,参数的具体选取均来自于文献[4]。

图1 微型燃气轮机本体的仿真模型Fig.1 Simulation model of microturbine
2.2 发电机及电能变换部分
为了简化分析,便于孤岛及并网运行控制策略的实现,本文对于发电机及电能变换部分的建模采用SimPowerSystems中的现成模块。其中,由于永磁同步发电机模块只能选取特定容量、转速和输出电磁功率的模块,使仿真条件受到了限制,大多数条件下不能满足对于设定特殊参数观察响应特性的要求,所以本文采用了励磁电压一定的普通交流同步发电机来代替永磁交流同步发电机,较好地解决了这一问题。整流器则是采用普通的三相不可控整流器模块,逆变器是 PWM触发电压型模块,可以控制其输出电压和输出功率。
3 微型燃气轮发电系统的控制策略
为了使MTGS具有良好的运行性能,需要依据系统运行方式的不同加入相应的控制模块。在微型燃气轮机发电系统孤岛运行时,控制其输出的电压和频率满足负荷的要求,而并网运行时,控制其输出的功率满足系统的要求。本文在孤岛运行时采用常规的V-f控制策略,并网时使用PQ解耦的双闭环控制,使系统可以满足相应的要求。
3.1 孤岛运行的MTGS的控制策略
逆变器出口的电压频率即为50Hz,输出频率不需要加装相应的控制。而电压调节器的控制原理如图2所示,即将输出电压从三相静止坐标系abc转换到dq0坐标系后,再进行简单的PI调节,输出与参考值相同的 PWM波形,从而控制逆变器出口电压维持在220V左右[7]。
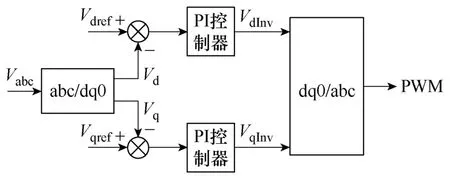
图2 输出电压控制原理框图Fig.2 Block diagram of voltage control model
3.2 并网运行的MTGS的控制策略
3.2.1 PQ解耦的双闭环控制
为了实现 PQ的解耦,逆变器采用电流型逆变电路,且控制模块的参数选取基于dq0旋转坐标系。其控制原理如图3所示。锁相环PLL用来获取所需要的相位值,电压环主要用来稳定直流电压,电流环则提高了逆变器网侧电流的动、静态性能[8]。
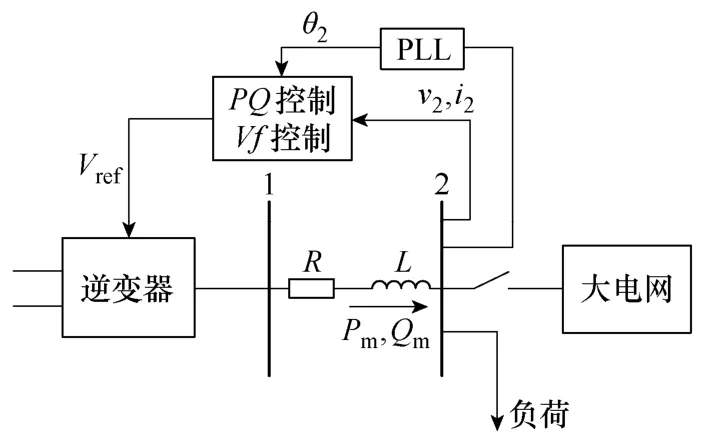
图3 并网逆变器及控制系统原理图Fig.3 Grid-connected inverter and its control system model
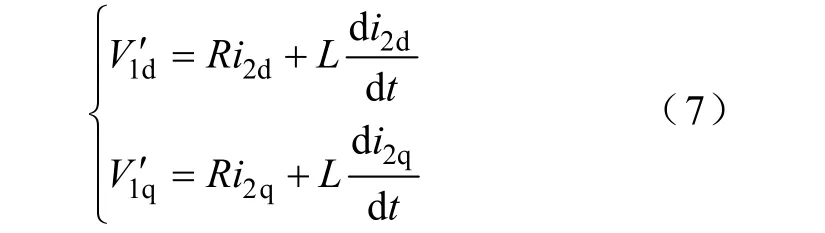
由基本的电路原理,可得

对式(1)进行Park变换,将其转化到dq0坐标系下,得


式中,ωn表示系统额定角速度。
在与电网电压保持同步的条件下,可以认为V2q(t)=0,这样一来,则有

从而通过 PQ的参考值和测得的电网电压,就可以得到dq坐标系下电流的参考值。

定义

则受控系统可以表示为
并考虑到空间矢量的表达式为

所以可得逆变器电流控制原理框图如图4所示。

图4 逆变器的电流控制原理图Fig.4 Current control of inverter block diagram
为了满足系统稳定性的要求,并尽可能地减小稳态误差,本文使用了两阶PI控制器,通过调节各个参数,使系统获得最佳响应,即实现了电流内环的控制。
逆变器侧直轴和交轴电压的参考值表示为

根据式(9)可以得到dq坐标系下电压的输出,将其转化到abc坐标系后,作为逆变器PMW控制脉冲波的输入,即可以控制逆变器的输出功率。具体框图如图5所示。
3.2.2 一种新型的并网控制策略
PQ解耦的双闭环控制采用瞬时功率控制,有良好的响应性能,但其调节结果仍存在不可避免的较大误差,且对于常见的不平衡负载系统,控制调节效果不理想。由此,本文提出一种新型控制策略。

图5 PQ双闭环控制的基本原理框图Fig.5 Block diagram for P-Q control of inverter
由于并网逆变器负荷侧电压始终维持额定运行水平不变,输出功率的变化间接反映为输出电流的变化,基于此,本文将电流控制和并网逆变器的电压控制相结合,从而实现微型燃气轮机并网运行时对其输入电网功率的控制。其控制框图如图6所示。输出电压采用与 3.1节相类似的控制原理,只是将输出电压转化到αβ两相静止坐标系,对于不平衡负载的小扰动也具有良好的响应特性。

图6 滞环控制与αβ控制相结合的并网控制框图Fig.6 Combined hysteresis-band current and voltage based on αβ control architecture
电流采用了滞环控制,广泛用于控制并网逆变器的输出电流。其基本原理是:与电网同频率的电流参考值,经滞环比较器对并网电流反馈信号与参考电流比较后,得到电流偏差控制信号,从而使逆变器的电流输出可以与电网要求的电流保持一致。本文中采用的是三相电流的两态电流滞环控制。其控制框图参见文献[9]。
4 仿真结果
基于Matlab/Simulink软件,本文建立了微型燃气轮机发电系统的相应仿真模型,并进行了MTGS孤岛运行时小扰动响应性能的研究,且分别采用PQ解耦的双闭环控制及新型控制策略,研究了并网系统功率输出的响应。
4.1 孤岛运行的微型燃气轮机发电系统的动态响应
采用SimPowerSystems中现成的模块,搭建如图7所示的微型燃气轮机发电系统的模块仿真图。进行动态响应特性的实验,即在 0.4s时,通过断路器的切换,将负荷从120kW变为60kW,系统仿真时间为 1s,观察逆变器出口电流 Ia、Ib、Ic、负载电压Uab、整流输出直流电压Udc的波形如图8所示。

图7 微型燃气轮机发电系统的仿真模型Fig.7 Simulation model for MTGS

图8 微型燃气轮机发电系统动态仿真波形Fig.8 Dynamic simulation results for MTGS
4.2 PQ解耦的双闭环控制策略下MTGS并网仿真
基于3.2.1节所述的双闭环控制的基本原理,在图7孤岛运行的微型燃气轮机发电系统的整体仿真模型中,将电压控制模块替换为 PQ解耦的双闭环控制模块,建立的仿真模型如图9所示。其中,交流发电机采用额定功率为120kW、频率为500Hz、线电压为 600V的交流发电机模型,大电网仍是用三相交流电压源来表示。

图9 MTGS并网仿真模型(双闭环控制)Fig.9 Simulation model for grid-connected MTGS with P-Q control
P-Q loop_control子系统基于图5中PQ控制框图搭建而成,参数选取文献[3]中的典型参数。
设置系统基准容量为 60kW,为了使观察结果更为明显,P、Q的参考值在不同时刻分别发生变化,即逆变器输出有功功率 P的参考值,在 1.35s时从 0.7(pu)(42kW)阶跃为0.5(pu)(30kW),无功功率参考值 Q在 1.5s时从 0变为 0.1(pu)(6kvar),在系统仿真1.7s后,a相的相应参数U、I、P和Q的响应如图10所示。
由仿真结果可以看出,在整个变化过程中,相电压Ua均维持在额定参考值220V左右,相电流Ia在 1.35s时发生了波动,幅值变小,这是由于输出有功功率的减少造成的。而三相有功功率在 1.35s时从42.45kW变为30.45kW,即从0.7075(pu)变为 0.5075(pu);三相无功功率从 1.5kvar变为7.5kvar,即从 0.025(pu)变为 0.125(pu),误差约为2.5%。在误差允许的范围内,可以认为这与参考值的变化相同,且PQ是分开控制的,实现了PQ的解耦,说明了 PQ双闭环控制可以很好地调节输出功率使其发生相应的变化。
4.3 新型MTGS并网控制策略的仿真
采用3.2.2节所示的新型控制策略,来调节微型燃气轮机发电系统在并网运行时输入电网的功率。其仿真模型如图11所示。其中,电网用三相交流电压源来代替。

图10 MTGS并网仿真波形(双闭环控制)Fig.10 Simulation results for grid-connected MTGS with P-Q control
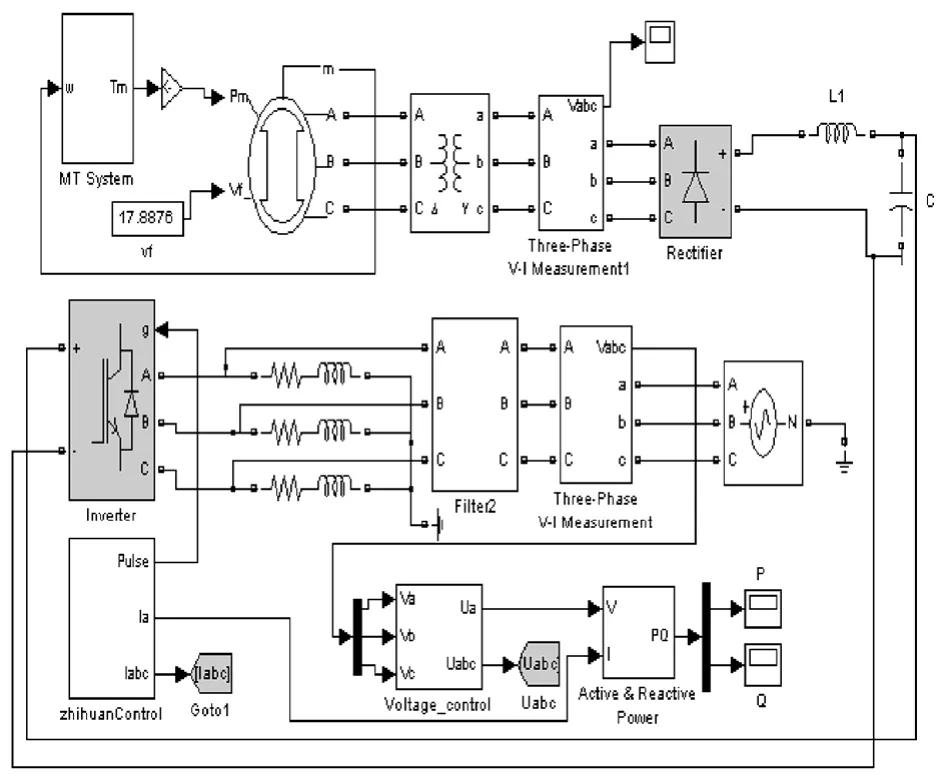
图11 MTGS的并网仿真模型(新型控制策略)Fig.11 Simulation model for grid-connected MTGS with the new control strategy
负载阻抗角为30°时,经过计算,为使微型燃气轮机发电系统的输出功率P/Q为60kW/34.64kvar、30kW/17.32kvar,应使电流滞环控制中每相电流的参考幅值相应设为 149A、74.5A(其内部附带了计算电流幅值的模块,只需输入功率参考值变化的阶跃),且在 1.35s时输出功率发生变化。1.7s的仿真后,得到负荷电压 Ua、Ub、Uc,逆变器出口电流 Ia以及逆变器输出单相功率Pa、Qa的波形如图12所示。
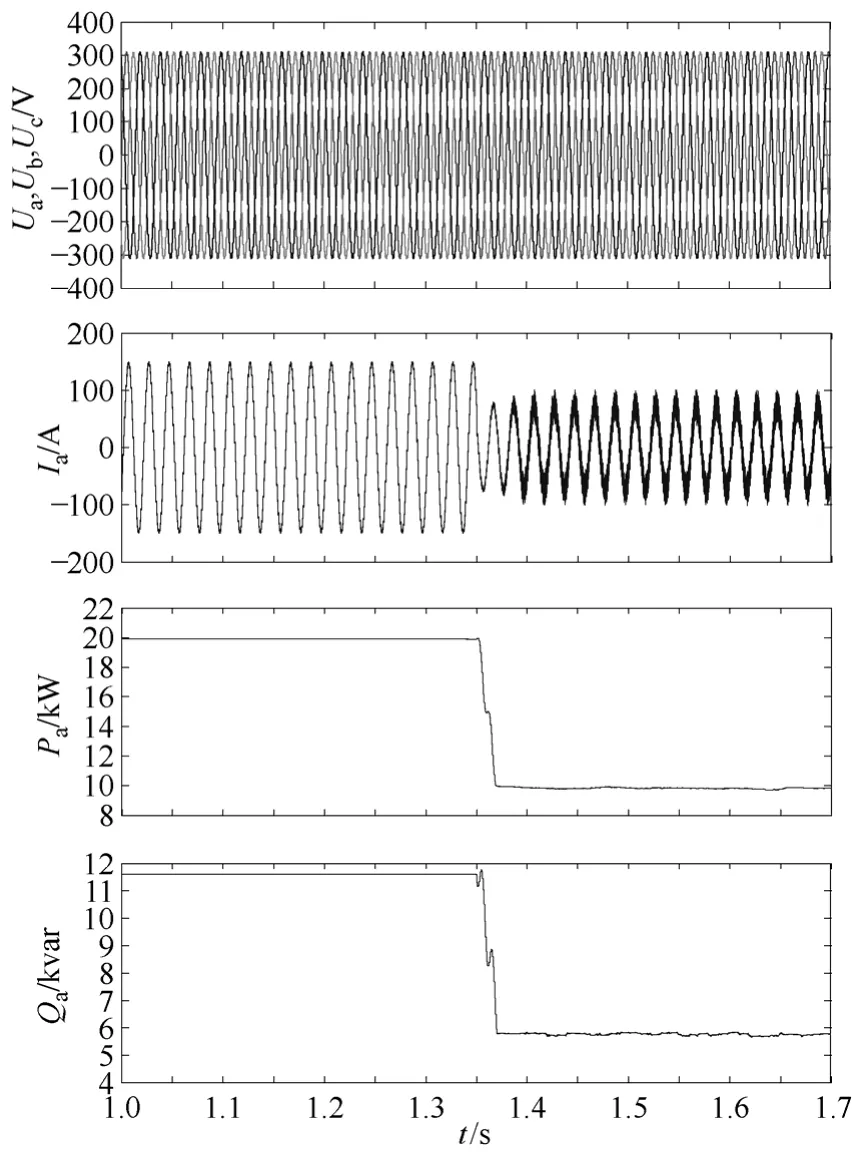
图12 MTGS系统并网运行的稳态响应波形Fig.12 Simulation results for MTGS with the new control strategy
由图可以看出,在新的控制策略下,逆变器输出电流确实是与参考值相同,且初始状态时向电网输出60kW/35kvar的功率,在负荷波动后,经过0.02s的短暂过渡过程,即达到了新的稳定,输出功率为30kW/17.3kvar,误差几乎为 0,在这一过程中,负荷侧电压很好地维持在幅值为 311V的额定运行电压,达到了并网MTGS系统进行功率控制的目的,说明了该种并网控制策略的可行性。
5 结论
(1)在详细阐述 MT模块化控制模型的基础上,建立了包括微型燃气轮机、永磁发电机、整流器、逆变器在内的MTGS机电一体化仿真模型。
(2)将建立的MTGS的各个模型基于Matlab/Simulink,加入输出电压控制策略,进行了孤岛运行的MTGS负荷波动的仿真分析,仿真结果表明其可以快速跟踪负荷变化。且整个仿真过程很好地体现了微型燃气轮机发电系统作为一个整体的特点,表现出了整个系统电气变换部分的动态特性及相互间的影响与制约作用。
(3)在研究了并网MTGS的PQ解耦控制的基础上,提出将电流滞环控制与αβ坐标系下电压控制相结合进行并网控制,并通过实际的仿真,验证了该策略的可行性,误差分析说明了该策略的调节性能更佳,且对不平衡负载有着更好的响应效果。
下一步将结合微网系统,并考虑微型燃气轮机的热电联供等功能进行控制策略研究。
[1]殷桂梁, 杨丽君, 王珺.分布式发电技术[M].北京:机械工业出版社, 2008.
[2]赵士杭.新概念微型燃气轮机的发展[J].燃气轮机技术, 2001, 14(2): 8-13.Zhao Shihang.The development of microturbine with new concept[J].Gas Turbine Technology, 2001, 14(2):8-13.
[3]王志群.基于微型燃气轮机的分布式发电系统的研究[D].北京: 清华大学, 2004.
[4]Wi Rowen.Simplified mathematical representations of heavy-duty gas turbines[J].The American Society of Mechanical Engineers, 1983, 105(4): 865-869.
[5]余涛, 童家鹏.微型燃气轮机发电系统的建模与仿真[J].电力系统保护与控制, 2009, 37(3): 27-31.Yu Tao, Tong Jiapeng.Modeling and simulation of the microturbine generation system[J].Power System Protection and Control, 2009, 37(3): 27-31.
[6]D N Gaonkar, R N Patel, GNPillai.Dynamic model of microturbine generation system for grid-connected/islanding operation[C].IEEE International Conference on Industrial Technology, 2006:305-310.
[7]李明娟.微电网中并网逆变器控制研究[D].北京:北京交通大学, 2009.
[8]Zhou Yunhai, Jürgen Stenzel.Simulation of a micro-tur-bine generation system for grid connected and islanding operations[C].Asia-Pacific Power and Energy Engineering Conference, 2009: 1-5, 9.
[9]顾和荣, 杨子龙, 邬伟扬.并网逆变器输出电流滞环跟踪控制技术研究[J].中国电机工程学报, 2006,26(9): 108-112.Gu Herong, Yang Zilong, Wu Weiyang.Research on hysteresis-band current tracking control of gridconnected inverter[J].Proceedings of the CSEE, 2006,26(9): 108-112.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
医学新知(2019年4期)2020-01-02
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
电测与仪表(2015年3期)2015-04-09
西南国防医药(2015年7期)2015-02-28
现代检验医学杂志(2015年1期)2015-02-06
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16
