
基于角速率和速度增量的捷联惯性导航算法研究
2012-08-12 18:06王伟鹏
航天控制 2012年3期
王伟鹏 杨 博 李 方
1.北京航空航天大学宇航学院,北京 1001912.空军工程大学工程学院,西安 710038
基于角速率和速度增量的捷联惯性导航算法研究
王伟鹏1杨 博1李 方2
1.北京航空航天大学宇航学院,北京 1001912.空军工程大学工程学院,西安 710038
捷联惯性导航算法一般是基于惯性器件输出为角速率、比力或角增量、速度增量进行设计的,不能直接应用于陀螺输出为角速率、加速度计输出为速度增量的捷联惯性导航系统。为了解决此问题和满足精度要求,重新设计了一套捷联惯性导航算法:姿态更新算法采用了经典的四阶龙格-库塔法,推导出了一种新的速度更新算法,该算法可以有效补偿速度计算中的划桨效应误差。仿真结果表明,该种速度更新算法仿真速度快、精度高,具有一定的工程实用价值。
角速率;速度增量;四阶龙格-库塔法;划桨效应
捷联惯性导航系统(Strap-down Inertial Navigation System,简称SINS)广泛应用在飞机、舰船、坦克、导弹等海、陆、空、天惯性导航与制导领域。为了提高系统的精度,满足各种载体的导航与制导要求,出现了很多捷联算法研究[1-6]。
由于陀螺仪输出有角速率和角增量两种方式,如微机械陀螺输出为角速率或角增量方式、激光陀螺输出为角增量方式、光纤陀螺输出为角速率方式等;加速度计输出有比力和速度增量两种方式。因此,SINS的解算有以下组合方式[7]: 1)角速率和比力; 2)角增量和速度增量; 3)角增量和比力; 4)角速率和速度增量。在实际惯性导航系统中,因工作环境、技术指标及成本等方面的限制,需要选择不同等级的惯性器件,使得常规的角速率与比力、角增量与速度增量输出方式为主的SINS导航算法不能满足实际系统的设计需求。因此,有必要研究其它不同输出方式的SINS算法,以适应惯性器件多元化的发展[7]。对于惯性器件输出为角速率和速度增量组合方式的SINS算法,目前尚未有文献对其报道,若通过角速率提取角增量后再利用基于增量信号SINS算法解算会带来较大误差。本文针对这种组合方式的SINS算法进行了速度补偿算法方面的研究,鉴于角速率信号能直接连续得到,本文从算法精度和计算量方面综合考虑,选用四阶龙格-库塔法[8]进行姿态更新,详细推导出了一种新型速度更新算法,该算法可以补偿速度解算中的划桨效应[9],并进行了仿真验证,为后续工程化实现提供了一定的理论依据。
1 新型SINS算法
设i为惯性坐标系,e为地球固联坐标系,n为导航坐标系(文中取东北天地理坐标系),b为载体坐标系,T为系统采样周期。
1.1 姿态更新
通常姿态更新算法有龙格-库塔法(Range-Kutta)和旋转矢量法[5]。龙格-库塔法直接利用角速率计算载体的姿态四元数;旋转矢量法先利用角增量计算旋转矢量, 再通过旋转矢量计算载体的姿态四元数。因此,对陀螺仪以角速率方式输出的指北方位捷联惯导系统,姿态更新算法采用龙格-库塔法计算载体的姿态四元数较为合理。
设q为四元数,则四元数微分方程为[7]
(1)

(2)
1.2 速度更新和补偿
取地理坐标系为导航坐标系,速度方程[9-10]为
(3)

在[tk,tk+1]对上式进行积分,得tk+1时刻载体在导航坐标系内的速度为
(4)

(5)
(6)
式中,Δθ(t)为角增量,ΔV(t)为速度增量,ΔVrotk为速度的旋转效应补偿项,该项由运动载体的线运动方向在空间旋转引起;ΔVsculk为速度的划桨效应补偿项,该项由运动载体沿纵轴作线振动和沿横轴作同频同相的角振动引起。对于以角速率和速度增量的方式为输入的捷联惯导系统,速度计算时必须考虑旋转效应和划桨效应补偿项,则不能直接应用式(6),需重新推导速度的划桨效应补偿项。
(7)
其中,拟合系数分别为a,b,c,A,B,C。
在t∈[tk,tk+1]内,对(7)式积分则
(8)
(9)
在ΔT,2ΔT和3ΔT3个时间段内,速度增量的三子样采样值分别为
=AΔT+3BΔT2+7CΔT3
=AΔT+5BΔT2+19CΔT3
(10)
联立式(9)和(10),求解得拟合系数
(11)
将式(7)和(8)分别代入(6)式计算得
(12)
(13)
式中ωk(1)、ωk(2)和ωk(3)分别为tk+ΔT、tk+2ΔT和tk+13时刻的角速率采样值;Vk(1)、Vk(2)和Vk(3)分别为[tk,tk+1]内速度增量的3个等间隔采样值。
2 仿真验证
整个系统仿真分为两步进行,首先设计轨迹发生器[11]模拟出一条载体的航迹,除了输出载体的姿态、速度和位置等导航参数,还要输出陀螺仪和加速度计的采样值,作为SINS系统解算的输入值。然后以陀螺的角速率、加速度计的速度增量作为仿真输入,将系统仿真的结果和模拟出的载体航迹相比较,检验算法的正确性和补偿效果。
假设载体初始位置为北纬34°14.763′,东经108°54.579′,高度380m,初始速度为0,初始俯仰角为90°,航向角、横滚角为随机角度。在1500s的仿真时间内,前126s为上升阶段,第126s~129s为退出爬升、改平阶段,第129s~900s为匀速直线平飞阶段(巡航段),巡航段飞行速度(沿纵向)为4.0Ma。
姿态误差、速度误差仿真结果分别如图1和图2所示。从仿真结果中可以看出,在导航飞行全过程中由于算法导致的姿态误差在0.001角分量级,速度误差在0.01m/s量级。
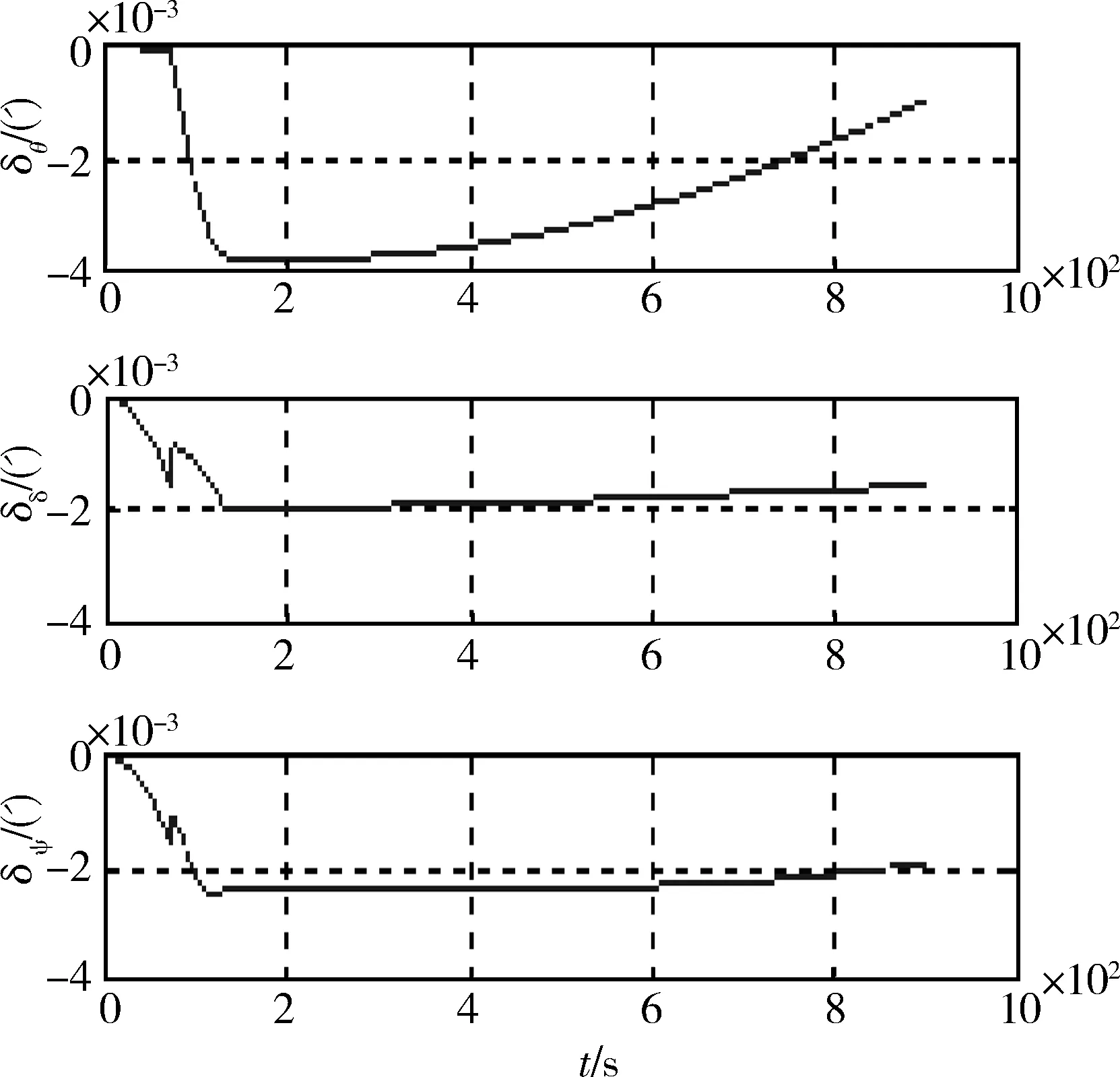
图1 姿态误差
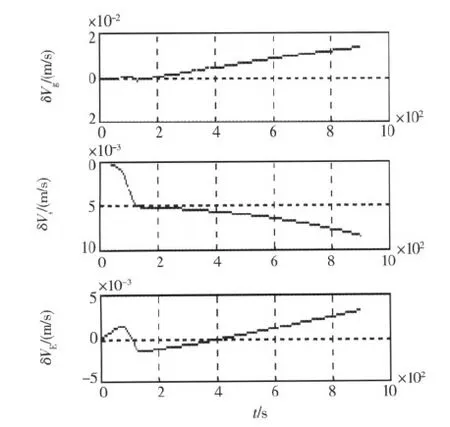
图2 速度误差
3 结论
本文提出了一种惯性器件输出以角速率和速度增量为组合方式的SINS算法,采用经典的四阶龙格-库塔法进行姿态更新,并推导出了一种新的速度更新算法,有效补偿速度计算中的划桨效应误差项。完成了对捷联惯导系统的数字全仿真,从轨迹发生器、捷联解算等方面很好的模拟了捷联惯导系统的工作过程。
仿真结果表明, 文中采用的导航算法可行,具有较好的精度,满足实际系统的要求。
[1] Brotz J E.A New Mathematical Formulation for Strapdown Inertial Navigation [J].IEEE Trans.on Aerospace and Electronic System, 1971,7(1):61-66.
[2] Paul G.Savage.Strapdown Inertial Navigation Integration Algorithm Design part1: Attitude Algorithms[J].Journal of Guidance, Control, and Dynamics,1998,21(1):19-28.
[3] Paul G.Savage.Strapdown Inertial Navigation Integration Algorithm Design part2: Velocity and Position Algorithms[J].Journal of Guidance, Control, and Dynamics,1998,21(2):208-229.
[4] Paul G.Savage.A Unified Mathematical Framework for Strapdown Algorithm Design [J].Journal of Guidance, Control, and Dynamics,2006,29(2):237-249.
[5] 刘危,解旭辉,李圣怡.捷联惯导系统的圆锥误差补偿算法研究[J].南京航空航天大学学报,2004,36(3):348-352.(LIU Wei,XIE Xu-hui,LI Sheng-yi.Coning Algorithm for Strap-Down Inertial Navigation System[J].Journal of Nanjing University of Aeronautics & Astronautics,2004,36(3):348-352.)
[6] 耿延睿,王养柱,崔中兴.捷联惯导系统划船效应补偿算法研究[J].北京航空航天大学学报,2001,27(6):694-697.(GENG Yan-rui,WANG Yang-zhu,CUI Zhong-xing.Optimal Design for Sculling algorithms of SINS[J].Journal of Beijing University of Aeronautics and Astronautics,2001,27(6):694-697.)
[7] 秦永元.国际惯性器件发展现状和趋势[J].航空制造技术,2008,(9):68-69.(QIN Yong-yuan.Current Status and Development Trend of International Inertial Instrument[J].Aeronautical Manufacturing Technology,2008,(9):68-69.)
[8] 王蕴会,赵忠.捷联惯导算法设计和仿真[D].西安:西北工业大学, 2009.
[9] 陈哲.捷联惯导系统原理[M].北京:宇航出版社,1986.
[10] 秦永元.惯性导航[M].北京:科学出版社,2006.
[11] 张 磊,汪 渤.高精度游移方位捷联惯导系统的数字仿真[J].微计算机信息(测控自动化),2008,22:238-239.(ZHANG Lei,WANG Bo.Digital Simulation of Highly Accurate Free-Orientation SINS[J].Control& Automation,2008,22:238-239.)
[12] 张宗麟.惯性导航与组合导航[M].北京:航空工业出版社,2000.
[13] 颜庆津.数值分析(第三版)[M].北京:北京航空航天大学出版社,2006.
The New Algorithm for Strap-down Inertial Navigation System
WANG Weipeng1YANG Bo1LI Fang2
1.School of Astronautics,Beijing University of Aeronautics and Astronautics,Beijing 100191,China2.Engineering College,Air Force Engineering University,Xi’an 710038,China
Theangularrate,specificforceorangularincrementandvelocityincrementareoftenusedinthealgorithmsofstrap-downinertialsystem.Thealgorithmcannotbeappliedtostrap-downinertialsystemwhoseoutputsignalsareangularrateandvelocityincrement.Inordertosolvetheproblemandmeetprecisionrequirements,asetofnewnavigationalgorithmsaredeveloped.Thefour-orderRange-Kuttamethodisadoptedinattitudeupdate.Anewvelocityupdatealgorithmisdeducedwhichcancompensatescullingeffect.Theobtainedsimulationresultsshowtheeffectivenessofthisapproach.
Angularvelocity;Velocityincrement;Four-orderRange-Kuttamethod;Scullingeffect
2011-12-01
王伟鹏(1982-),男,山西汾阳人,硕士研究生,主要研究方向为导航制导与控制;杨 博(1963-),女,北京人,副教授,主要研究方向为导航制导与控制;李 方(1982-),男,西安人,讲师,主要研究方向为武器系统和制导控制。
V324.2+3
A
1006-3242(2012)03-0003-04
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
测控技术(2018年2期)2018-12-09
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
中国惯性技术学报(2015年1期)2015-12-19
计算机工程(2015年4期)2015-07-05
