
基于方位走向的潜艇亮点分布特征提取与仿真
2012-09-19 02:04苑秉成
水下无人系统学报 2012年6期
徐 瑜, 赵 军, 苑秉成
基于方位走向的潜艇亮点分布特征提取与仿真
徐 瑜, 赵 军, 苑秉成
(海军工程大学兵器工程系, 湖北武汉, 430033)
针对传统的潜艇目标回波亮点特征提取方法, 只计算有限个峰值点处的方位值来分析目标亮点特征, 存在鲁棒性较差的不足, 本文基于目标回波与背景干扰相比幅值较大, 子回波所体现的方位/距离信息相近等特征, 同时结合双通道短时互谱法, 提出了一种基于方位走向的潜艇目标回波亮点特征提取方法。首先, 采用双通道短时互谱法提取目标回波方位走向特征。然后, 通过采用能量判决和利用子回波方位/距离信息, 对子回波序列进行分类, 从而得到潜艇目标回波亮点的空间分布特征。经仿真验证, 该方法与传统方法相比具有更好的鲁棒性。本文的研究结果可为分析潜艇目标声学特性与水声对抗提供参考。
分裂波束; 亮点; 尺度识别; 互谱; 目标方位
0 引言
现代鱼雷自导与引信的发展方向是智能化及高精度化, 主要体现在: 1) 在远距离上(≥1 km)发现目标; 2) 在中距离上(300~1000m)识别真假目标; 3) 在近距离上(≤300m)识别目标的要害部位。
智能鱼雷识别目标和攻击目标要害部位时, 恰处在目标的近场区。识别目标需要目标整体近场回波特性, 识别目标的要害部位需要从目标近场回波中提取要害部位参数。对目标的尺度信息获取是建立在目标反射回波亮点结构基础上的。目前鱼雷的目标识别基本上为模式识别, 即目标的尺度识别和亮点识别。
方位走向法是一种常用的潜艇目标尺度识别方法。主动声纳的目标回波是潜艇目标上的多个散射亮点回波的合成, 在一定舷角观测时, 观察到的方位表现出随时间的有序分布。
在分裂波束体制下, 可利用分裂波束二通道互谱方法估计目标的短时方位, 从而得到目标的方位走向向量, 估计目标空间视在角度扩展量。但采用分裂波束的方法, 单个亮点回波被分割成了多个子回波, 因此, 单从方位走向特征上很难提取具体的亮点特征信息, 必须作进一步的处理。对于分裂波束定向系统, 当发射信号形式为线性调频(linear frequency modu- lation, LFM)时, 目前一种通用的做法是对两通道信号做副本相关处理, 进而在相关峰点处提取目标回波方位信息。但该方法涉及到峰值点搜索, 因此算法实现起来较为复杂, 且忽略了大量弱亮点回波和亮点背景等有益信息。
基于此, 本文重点研究了采用双通道短时互谱法估计进行目标回波方位走向特征提取, 在此基础上研究对子回波序列进行分类的方法, 进一步提取目标回波亮点的空间分布特征。
1 分裂波束互谱法定向原理
采用分裂波束定向, 一是可增加阵元间距, 从而提高对时延的估计精度, 二是可提高输入信噪比。均匀线列阵的分裂波束系统示意图见图1。图中,为信号的入射角, 由第1至个阵元输出求和后得到左波束输出, 由第+1至2个阵元输出求和后得右波束输出。把和看作是2个假想基元的输出, 2个假想基元的位置称之为等效声学中心。目的是要计算2个等效声学中心的相对时延和信号入射角的关系。
互谱法主要用于分裂波束系统的精确方位估计, 最初由Allan G Piersol提出, 一般的主动声纳情况下多用于窄带信号处理。其基本原理是利用接收基阵的分裂波束对目标回波及干扰进行空间采样, 由采样得到的双通道数据中提取短时相位差,并由此对目标方位走向进行估计, 根据目标的视在张角估计量进行检测和识别目标。
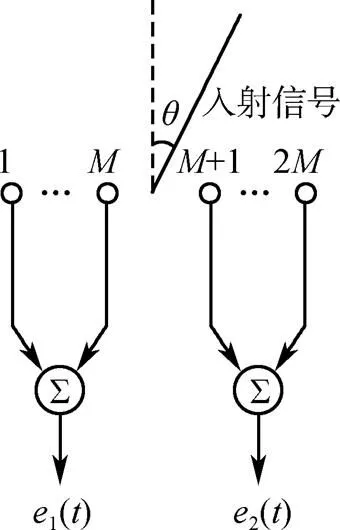
图1 线列阵的分裂波束示意图
(2)

(4)
对于数字系统, 其输入时离散的时间序列, 可用快速傅立叶转换(fast Fourier transform, FFT) 算法完成两路信号的互功率谱, 估计时延并求出其方位。要对像潜艇一类的体目标反射回波信号取得一系列子回波的方位, 其具体实现方法就是对目标回波的时域信号进行分割。将目标回波和采样后, 得到离散采样时间序列和, 并将其分成段, 每段长为, 则有序列
(6)
式中:表示段序号;表示在第段中的第个采样点。对每段进行FFT变换
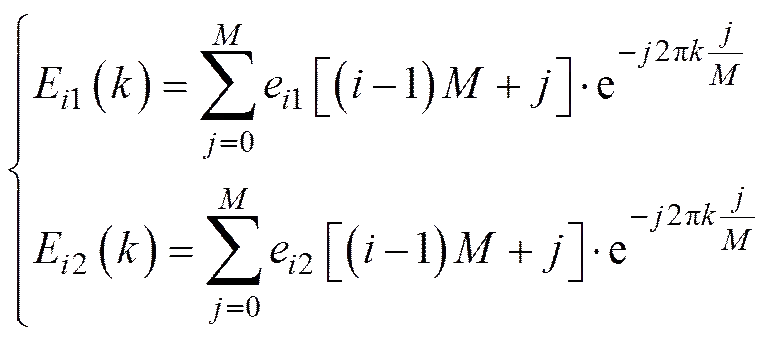
式中:=0, 1, 2,…,-1,表示频率序号。其互谱为
(8)

从而得到各条谱线所包含的时延信息
(10)
2 潜艇目标回波亮点空间分布特征提取
在鱼雷自导频率下, 潜艇目标的回波可看作若干个等效散射中心(亮点)发出的回波, 在采用短时分裂波束互谱法分析目标回波方位走向过程中, 单个亮点回波被分割为多个子回波段, 因此有必要对子回波段进行分类判决以进一步得出潜艇目标回波强亮点的空间分布。
对于来自同一个强亮点回波的子回波段而言, 具备以下2个较为明显的特征: 目标回波与背景干扰相比幅值较大; 子回波所体现的方位/距离信息相近。这里采用以下步骤对潜艇目标回波强亮点的空间分布特征进行提取。
2.1 能量判决
能量积分处理一般采用滑动平均的方法, 其目的是为了平滑信号能量, 防止起伏, 以便有利于检测。设积分长度为, 信号为(), 其中=1, 2,…,, 积分过程如下
由于来自强亮点的子回波序列通常能量较大, 因此可以通过设置一定的阈值对子回波序列进行初步判决, 大于阈值的归为来自于强亮点回波的子回波, 小于阈值的则归于弱亮点及亮点背景。
2.2 子回波序列分类与亮点特征提取
对于来自同一个强亮点回波的子回波而言, 子回波所体现的方位/距离信息接近。假设经过能量判决后的子回波序列的方位值为,为子回波序列号。子回波的序列号, 对应了子回波的距离信息。因此, 对于能量判决后的子回波序列首先按照序列号以(为发射脉冲宽度, floor为取整,为子回波中的样本数)为间隔进行初次分类, 假设分类后的结果为(,为类的数量), 则可求取每一类子回波序列的平均方位值, 记为。
定义样本距离
3 数值计算与仿真
3.1 潜艇目标几何建模
为方便计算, 本文以标准潜艇模型(BeTSSi-Sub) 为主要研究对象。该模型将潜艇目标模拟为几个简单形状目标的组合, 用半椭球体来模拟艇艏, 圆柱体模拟艇体, 艇艉为圆锥体, 指挥台围壳前半部为半椭圆体, 后半部为锥体, 水平艉舵与垂直艉舵端面均为前半部半椭圆体, 后半部锥体。具体参数如下: 艇全长62 m, 艇体直径7.5 m, 前端半椭球体的长度为7m, 中段圆柱体的长度为44.6 m, 后端锥体的长度为11.4 m。舰桥中心距艇艏顶点22.85 m处, 前端半椭球体长半轴为3.85 m, 短半轴为2.2 m。在实际建模时, 先借助AutoCAD软件对目标进行几何建模, 然后再将数据导入Ansys软件进行网格划分。图2给出了AutoCAD建模后的结果, 并根据声纳系统与目标之间的相对位置关系, 建立了直角坐标系。
3.2 仿真结果与分析
以标准潜艇目标模型为研究对象, 采用板块元方法进行目标回波预报, 仿真不同入射角情况下各通道回波数据, 根据各通道仿真回波采用互谱法分析目标回波方位走向特征, 同时针对目标回波亮点分布进行分析。
仿真参数设置: 发射信号为矩形包络的LFM波, 中心频率为25 kHz, 带宽为1 K, 脉冲宽度为10 ms, 周期为2 s, 采样率, 声速, 信噪比SNR=10 dB, 声纳基阵形式为6元水平线阵, 阵元间隔为中心频率的半波长, 声纳系统距目标中心的距离为500 m。
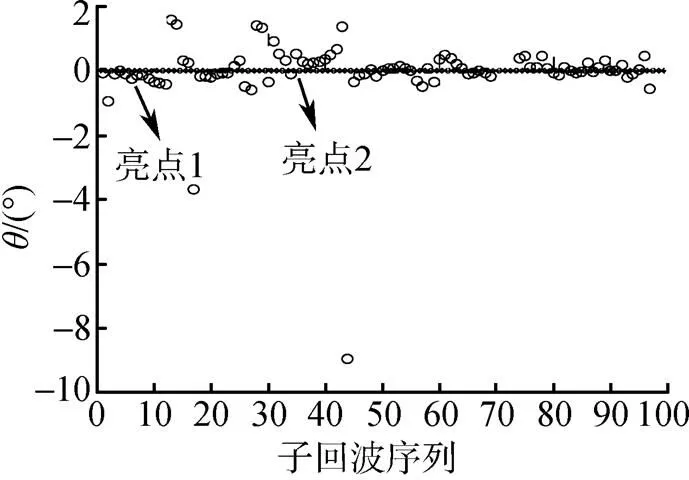
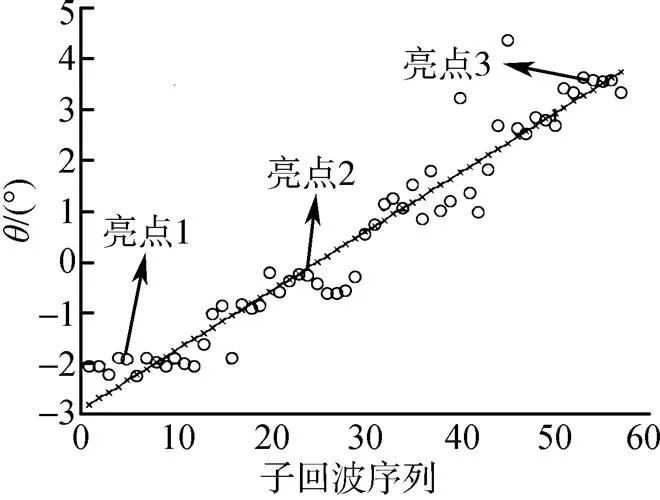
图3(a)和(c)分别是入射角(基阵法线与目标航向的夹角)为0°和60°时目标回波方位走向仿真结果, 最佳检测时间区间分别为: 635~720 ms和650~700 ms, 每段子回波样本数为500。同时在仿真过程中对每一段子回波进行能量检测, 得到了子回波序列的能量分布图。
(a) 入射角为0°方位走向
(b) 入射角为0°子回波序列能量分布
(c) 入射角为60°方位走向
(d) 入射角为60°子回波序列能量分布
图3 标准潜艇目标回波方位走向仿真结果
Fig. 3 Simulation results of azimuth trend of BeTSSi-Sub model
基于亮点出现的距离和角度来看, 可以判断对应的分别是艇艏、指挥台围壳和艇艉; 目标亮点之间的相对位置呈现出一定的斜率, 反映出换能器基阵法线与目标轴线的夹角姿态特性; 从子回波能量分布图可以看出, 艇艉亮点的局部目标强度较大, 相对应的亮点回波幅度也较大。
4 结束语
目前, 鱼雷自导系统常用的目标方位估计方法多采用基于常规波束的多波束技术和基于分裂波束系统的互谱法定位技术, 多阵元分裂波束的互谱测向法是等效二元阵最大似然测向系统的次最佳实现, 具有结构简单, 运算量小, 定向精度高等优点, 适用于对目标的高精度定位。本文重点研究了采用双通道短时互谱法估计进行目标回波方位走向特征提取, 然后在此基础之上研究对子回波序列进行分类的方法, 进一步提取目标回波亮点的空间分布特征。本文的研究对于分析潜艇目标的声学特性以及水声对抗具有一定的应用价值。
[1] 易红, 周殿宝, 陈春玉. 声自导鱼雷进行尺度目标识别的试验方法研究[J]. 鱼雷技术, 2005, 13(4): 50-53.
Yi Hong, Zhou Dian-bao, Chen Chun-yu. A Test Method for Scaling Target Recognition of Acoustic Homing Torpedo[J]. Torpedo Technology, 2005, 13(4): 50-53.
[2] 汤渭霖. 声纳目标回波的亮点模型[J]. 声学学报, 1994, 19(2): 92-100.
Tang Wei-lin. Highlight Model of Echoes from Sonar Targets[J].Acta Acustica, 1994, 19(2): 92-100.
[3] 刘朝晖, 付战平, 王明洲. 基于方位走向法和互谱法的水中目标识别[J]. 兵工学报, 2006, 27(5): 932-935.
Liu Zhao-hui, Fu Zhan-ping, Wang Ming-zhou. Under- water Target Identification Based on the Methods of Bearing and Cross-spectrum[J]. Acta ArmamentarII, 2006, 27(5): 932-935.
[4] 石勇, 石敏, 蒋兴舟, 等. 基于方位走向识别目标尺度的仿真与特性分析[J]. 鱼雷技术, 2003, 11(1): 27-30.Shi Yong, Shi Min, Jiang Xing-zhou, et al. Simulation and Characteristics Analysis of Target Scale Recognition Based on Azimuth Trend[J]. Torpedo Technology, 2003, 11(1): 27-30.
[5] 王明洲, 郝重阳, 黄晓文. 基于相关法方位分析的水下主动目标尺度识别研究[J]. 西北工业大学学报, 2003, 21(3): 317-320.
Wang Ming-zhou, Hao Chong-yang, Huang Xiao-wen. On Underwater Target Dimension Recognition Based on Bearing Analysis of Signal Correlation Feature[J]. Journal of North- western Polytechnical University, 2003, 21(3): 317-320.
[6] 卜考英. 水下目标回波特性预报模型验证研究[D]. 上海: 上海交通大学, 2006.
Bo Kao-ying. Validation Research on the Echo Characteristics Prediction Model of Underwater Target[D]. Shang Hai: Shang Hai Jiao Tong University, 2006.
[7] 范军, 汤渭霖. 声纳目标强度(TS)计算的板块元方法[J]. 声学技术, 1999, 33(增刊):31-32.
Fan Jun, Tang Wei-lin. The Planar Element Method for Computing Target Strength(TS) of Sonar[J]. Technical Acoustic, 1999, 33(z): 31-32.
[8] 刘成元, 张明敏, 程广利. 一种改进的板块元目标回声计算方法[J]. 海军工程大学学报, 2008, 20(1): 25-31.
Liu Cheng-yuan, Zhang Ming-min, Cheng Guang-li. Improved Planar Element Method for Computing Target Echo[J]. Journal of Naval University of Engineering, 2008, 20(1): 25-31.
(责任编辑: 杨力军)
Distribution Feature Extraction and Simulation of Submarine Echo Highlights Based on Target Azimuth Trend
XU Yu, ZHAO Jun, YUAN Bing-cheng
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
Due to the feature extraction method of conventional submarine echo highlight calculates only the azimuth on limited peak points to analyze the target highlight feature, and the robustness is poor. This paper proposes a distribution feature extraction method of submarine echo highlights based on target azimuth trend, by mainly using the characteristics that the amplitude of target echo signal is larger than that of noise and the sub-echo signals from the same strong highlight signal embody approximate azimuth and distance information, and combining with the technique of double-channel short-time cross-spectrum. Firstly, the feature of target azimuth trend is obtained with the technique of double-channel short-time cross-spectrum. Secondly, the sub-echo signal series is classified by mainly using energy decision and the sub-echo signals′ azimuth and distance information, and then the spatial distribution feature of submarine echo highlights is achieved. Simulation results show that the proposed method is more robust than the conventional method. This study may provide a reference for analysis of submarine acoustic characteristics and acoustic countermeasure system.
split beam; highlight; scale identification; cross-spectrum; target azimuth
TJ630.34; TN911
A
1673-1948(2012)06-0419-05
2012-03-11;
2012-04-26.
国家自然科学基金项目资助(61074191).
徐瑜(1983-), 男, 博士, 研究方向为军用目标特性与制导技术.
猜你喜欢
信息通信技术(2022年2期)2022-05-31
幼儿园(2021年12期)2021-11-06
教育周报·教研版(2021年14期)2021-06-20
成都信息工程大学学报(2021年6期)2021-02-12
物理通报(2020年2期)2020-05-18
舰船科学技术(2020年3期)2020-04-22
中学数学研究(广东)(2019年12期)2019-07-18
弹箭与制导学报(2018年3期)2018-08-28
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
