基于定子磁链规划的异步电机最优效率控制
2012-09-22 03:19,,
电气传动 2012年1期
,,
(中山大学 物理科学与工程技术学院,广东 广州 510275)
1 引言
在传统的异步电机控制系统中,电机一般运行在额定磁链的条件下,在额定负载状态下,电机的效率较高,然而在轻负载时,由于过多的铁损和铜损,降低了电机的效率[1]。本文研究异步电机效率优化及直接转矩控制性能改善问题,根据电机的效率模型以及定子磁链、转子磁链的关系,提出了基于定子磁链规划的效率优化方法,通过检测比较各个磁链值对应的功率损耗,在线搜索出消耗功率最小的磁链值。仿真结果表明本文提出的定子磁链规划效率优化算法能够减小异步电机轻负载时的输入功率,对电机的稳定运行不会产生显著影响。
2 定子磁链规划的原理和设计
2.1 异步电机的损耗模型
对于笼式异步电机,在d-q坐标系下,转子电压urd=urq=0,由于规定d轴方向为转子磁链的方向,则Ψrq=0,因此,在稳态运行下电机的电压和电磁转矩方程为
式中:下标d,q表示d-q坐标系;下标s,r分别为定子和转子;np为极对数;Lm为互感;ω1为定子角频率;Te为转矩。
定子端的输入功率为

将式(1)代入式(3),得到输入功率为

由Ψrd=Lmisd=Ψr,并把式(2)代入式(4)得到:

在磁链定向条件下转差频率为

其中,Tr=Lr/Rr,将ω1=ω2+npωr代入式(5)得到:

式中:ωr为转子的机械转动角频率。
在异步电机稳态运行时,电机的运行效率表示为

从式(7)可以看出,在异步电机的运行条件不变的情况下,若要电机效率最大,只需要电机定子侧有功功率Pin最小即可[2]。
由∂Pin/∂Ψr=0,则对应于电机损耗最低时的转子磁链值为

由于转子的磁链值不可测,如果在比较计算得到的定子磁通和给定定子磁通的同时,再运用磁链观测器来计算转子磁通会增加系统的冗余。由定子、转子磁链极坐标表示的异步电机的模型可知定子磁链和转子磁链的关系为

由式(9)可知,在稳态运行下定子磁链和转子磁链的关系为

其中

在直接转矩控制中,通过空间电压矢量的选择来调节定子磁链的旋转速度,使得定子磁链和转子磁链之间的夹角在长时间下平均恒定,即k=const,定子磁链和转子磁链具有恒定的比例关系,因此在本文中使用定子磁链来代替转子磁链来实现电机效率的优化控制。
2.2 磁链规划效率优化算法的设计
由以上分析可知,只要寻求到合适的定子磁链值,就可以达到直接转矩控制系统的效率最大。一维搜索最常用的搜索方法是黄金分割法,适用于在一固定区间的任何单峰函数求极小值的问题。在本系统中采用黄金分割法来搜索功率消耗最小时的定子磁链值。电机的额定磁通为1.2 Wb,为了计算的方便,在搜索算法中对磁链值进行正则化无量纲处理,选择磁通比例值的变化范围即搜索范围[a,b]为[0,1],在输出磁通值的时候乘以1.2。
程序运行开始,在T1时刻取a1值为0.382,作为对应定子磁链的值,在程序运行下一时刻T2取a2值为0.618,同时采样得到功率值y1,该值为上一个时刻对应磁链值的输入功率。在T3周期,采样得到输入功率值y2。比较y1和y2,如果y1≥y2,则将搜索范围缩小至[a1,b],重新定义a1和a2的值;如果y1<y2,则将搜索范围缩小至[a,a2]。从搜索流程看出,系统输入功率值总是在下一个周期采样完成的,每经过一次比较,搜索范围缩小到原来的0.618倍。当a1和a2的差值大于ε=0.005时,进行新一轮的采样判断,当a1和a2的差值小于等于ε时,停止搜索,输出为a1和a2的平均。
3 控制系统的设计
用Matlab的Simulink进行仿真,控制系统结构框图如图1所示。为了提高系统的动静态性能、提高系统收敛速度引进了模糊控制模块,在逆变部分采用了单元级联型三电平逆变电路,由更多的空间电压矢量来构造模糊控制规则,实现更精确的控制。逆变模块输出的电流、电压被分别采样,经过克拉克(Clarke)变换,产生两相电流和电压,作为磁链观测、转矩计算的输入。磁链观测完成后根据磁链在α,β轴上的分量计算定子磁链所在的角度。在电机的输入端观测输入功率,作为定子磁链优化模块的输入。给定磁链值、由速度控制器输出的转矩值与磁链观测器观测的磁链值、计算得到的转矩值比较后送入模糊控制器,由模糊控制器产生脉冲选择信号,经Pulse模块产生脉冲,送入逆变模块。

图1 控制系统结构框图Fig.1 Control system block diagram
4 实验结果
系统仿真的电机参数为:额定线电压380V,额定转矩14.6N·m,额定频率60Hz,额定转速1 420r/min,额定功率因数0.85,额定功率2.2 kW,R1=0.877Ω,R2=1.47Ω,L1=4.34mH,L2=4.34mH,Lm=4.34mH,np=2,转动惯量J=0.015kg·m2。
图2a和图2b分别表示负载转矩T1=4N·m和T1=8N·m时的转矩曲线。图3a和图3b分别表示负载转矩T1=4N·m和T1=8N·m时的定子磁链的变化波形。

图2 转矩曲线Fig.2 Torque curves

图3 Ψs变化波形Fig.3 The variable waveforms ofΨs
从图2可以看出,电机的转矩曲线从起始到稳态的时间小于0.1s,系统可以较快稳定,动态性能没有受到显著影响。
由式(8)和式(10)可知,不考虑电机参数,电机控制系统的定子最优磁链值只与电机的转矩有关,而和转速无关。从图3a可以看出,当T1=4 N·m时,最终观测到的定子磁链值Ψs=0.64 Wb;从图3b可以看出,当T1=8N·m时,最终观测到的定子磁链值Ψs=0.88Wb。由式(9)和式(10)得到:

由此证明,用定子磁链的变化来实现磁链规划效率优化是可行的。图4表示在转矩T1=4 N·m时的效率优化过程,即不同定子磁通对应的系统损耗的有功功率(局部放大),从图4中看出,输入功率逐渐逼近到最小。
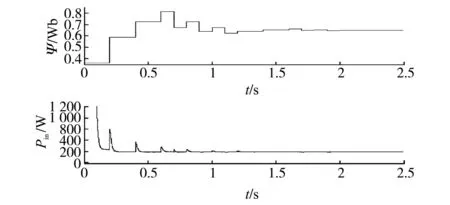
图4 定子磁链和有功功率的变化波形Fig.4 The waveforms of stator flux and active power
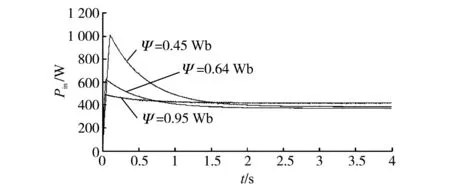
图5 不同磁链下对应的电机输入功率PinFig.5 The waveforms of Pinin different flux
图5表示在T1=4N·m,ωr=100rad/s,其他参数相同情况下,系统在磁链值Ψs=0.45 Wb、最优磁链值Ψs=0.64Wb和磁链值Ψs=0.95Wb时电机控制系统的输入功率Pin波形。初始阶段系统启动需要很大的启动电流,启动后由于励磁电感的滞流特性,系统波动的时间增加。从图5中可以看出,Ψs=0.45Wb时的输入功率为390W,Ψs=0.95Wb时的输入功率为415W,在最优磁链值Ψs=0.64Wb时的输入功率为372 W,相对于前两种磁链值系统输入功率分别减少了4.6%和10.4%。因此,经过磁链规划后的电机控制系统的输入功率明显减小,可以稳定工作在最小的输入功率状态,效率得到提高。
5 结论
本文研究直接转矩控制性能改善及异步电机效率优化问题,对传统的直接转矩控制技术进行了改进。由异步电机的基本模型及效率模型,确定了定子磁链和转子磁链的关系,提出了基于定子磁链规划来实现三相异步电机的最优控制。通过在线检测计算各个磁链值对应的功率损耗,运用黄金分割法进行在线搜索,寻求并逼近消耗功率最小的定子磁链值,达到电机系统损耗最小、效率最大。
仿真分析结果表明,本文定子磁链规划的效率优化算法可行,该方法不依赖电机的模型和参数,能够减小异步电机轻负载时的输入功率,明显提高电机在轻负载情况下的效率,并且收敛速度较快。
[1]Bose Bimal K.现代电力电子学与交流传动[M].王聪,赵金,于庆广,等,译.北京:机械工业出版社,2005.
[2]苗敬利,李华德,胡广大,等.感应电机效率优化的自适应反步控制研究[J].电机与控制学报,2009,13(5):749-753.
[3]杨耕,罗应立.电机与运动控制系统[M].北京:清华大学出版社,2006.
[4]Matsuse K,Katsuta S,Tsukakoshi M,etal.Fate Rotor Flux Control of Direct-field-oriented Induction Motor Operating at Maximum Efficiency Using Adaptive Rotor Flux Observer[C]∥Thirtieth IAS Annual Meeting.Florida:Conference Record of the 1995,IEEE,1995:327-334.
[5]Cao-Minh Ta,Hori Y.Convergence Improvement of Efficiency-optimization Control of Induction Motor Drives[J].IEEE Transactions on Idustry Applications,2001,37(6):1746-1753.
[6]张崇魏,李汉强.运动控制系统[M].武汉:武汉理工大学出版社,2002.
[7]Kirschen Daniel S,Novotny Donald W,Suwanwisoot Warin.Minimizing Induction Motor Losses by Excitation Control in Variable Frequency Drives[J].IEEE Transactions on Idustry Applications,1984,20(5):1244-1250.
[8]Takahashi Isao,Noguchi,Toshihiko.A New Quick-response and High-efficiency Control Strategy of an Induction Motor[J].IEEE Transactions on Industry Applications,1986,22(5):820-827.
[9]Matsuse K,Yoshizumi T,Katsuta S,etal.High-response Flux Control of Direct-field-oriented Induction Motor with High Efficiency[J].IEEE Transactions on Industry Applications,1999,35(1):62-69.
猜你喜欢
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
测控技术(2018年2期)2018-12-09
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电力工程技术(2014年1期)2014-03-20