
阈值分割算法在医用药瓶溶液杂质检测中的研究
2012-09-29 03:19李彬谢云
自动化与信息工程 2012年5期
李彬 谢云
(广东工业大学自动化学院)
0 概述
现代的安瓿瓶是用玻璃管烧制的,广泛运用于盛放注射制剂和必须隔绝空气的高纯度化学药品。由于使用明火熔化玻璃管,并通过冷却使瓶口密封,为了避免该生产工艺可能存在密封不严和封装过程中带有杂质而影响瓶内封装试剂的质量,因此需要采用一种合理的检测方法来剔除生产过程中的不合格产品。整个检测过程分为三个步骤:图像处理、图像分析和图像理解,其中图像分割是图像分析中最重要的环节。
针对医用溶液杂质检测算法,国内外有很多学者进行了研究。如Akira等[1]提出了基于视频图像的帧间差分法,实现了塑料瓶内异物检测。李伟[2]在TMS320DM642上做出了尝试,在分析了Harris角点检测和Susan角点检测方法后,利用图像配准的方法消除了由于机械臂带来的振动,用差分法将图像分割出来。肖方良等[3]提出图像差分提取运动目标和粒子滤波跟踪运动目标方法来完成对异物的实时视觉检测。
本文针对安瓿瓶内溶液杂质的特点,提出一种改进的二维 Otsu 阈值分割法。改进后的算法提高了抗噪性,有效避免了错误划分,加强了图像的分割效果,提高了药瓶溶液杂质的分割,处理时间也比传统的二维Otsu算法少。
1 阈值的图像分割算法
假设原图像为f (x,y),该图像可分为目标像素和背景像素。从背景上提取对象可以选取一个阈值T来分离这两种模式。任何满足f (x,y)≥T的点(x,y)称为对象点,其它点则称为背景点。经阈值处理后的图像g (x,y)定义为式(1)

式中:0表示其像素为黑色;1表示其像素为白色。若像素的灰度值小于阈值T,则该像素用黑色显示;若该像素的灰度值大于或等于阈值T,则用白色显示。如此得到一个二值图像,将目标区域和背景区域分别用白色和黑色显示出来。
1.1 一维Otsu法阈值选择
设n为图像中的像素总数;nq是灰度级为rq的像素数目;L是图像中所在可能的灰度级数;pr为离散概率密度函数的归一化直方图,则有式(2)和式(3)
假设选定阈值T,C0是一组灰度级为[0,1,…,T-1]的像素;C1是一组灰度级为[T,T+1,…,L-1]的像素。Otsu方法选择最大化类间方差σ2B的阈值T,类间方差定义为式(4)

整幅图像的均值为式(5)

C0和C1的均值为式(6)

计算它的直方图,找到最大化2
例如,教师可以从最基本的启蒙诗词《静夜思》入手,通过为幼儿讲解著名诗人李白创作这首古诗的背景,进而激发幼儿的阅读兴趣。具体来讲,教师可以如是说:“小朋友们,今天我们来一起学习一首古诗,诗的名字叫做《静夜思》,这首诗由我国著名诗人李白所作,李白在创作这首诗的时候,正处于一个皓月当空的深夜,你们想知道作者怎样结合深夜意境创作出这首诗的吗?”幼儿异口同声:“想。”如此,便可以有效激发幼儿的阅读兴趣,继而培养幼儿良好的阅读习惯。
Bσ的阈值,即为最佳阈值。阈值返回为0.0和1.0之间的归一化值。
1.2 二维Otsu阈值分割法
为改善一维 Otsu算法在处理过程中噪声干扰等产生的严重分割错误。刘健庄等[4]提出了灰度图像的二维Otsu自动阈值分割法,简称为二维Otsu法。
如图1所示,对任意给定的一个阈值(s,t),可将二维直方图分成区域1、区域2、区域3、区域4。目标区域为区域 1,背景区域为区域3,远离对角线的区域2和4对应图像的噪声和边缘。假设二维直方图存在两类C0和C1,分别代表目标与背景,且具有两个不同的概率密度分布函数。设阈值为(s,t),那么两类的概率分别为:

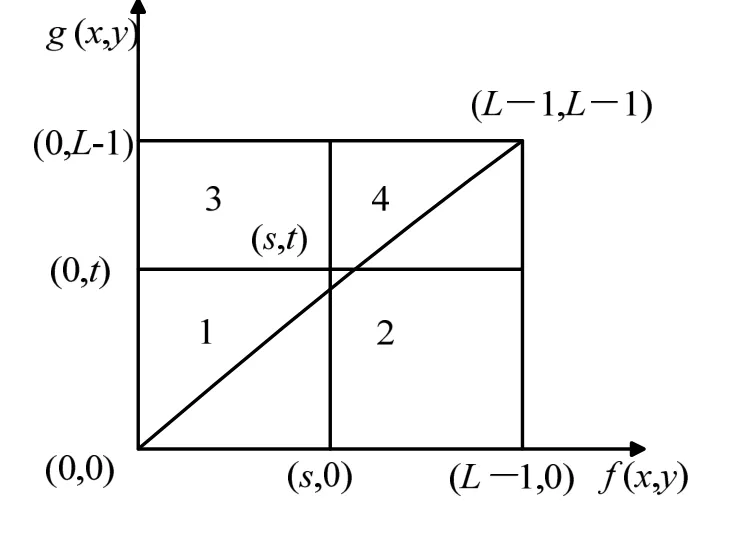
图1 二维直方图
两类对应的均值矢量为
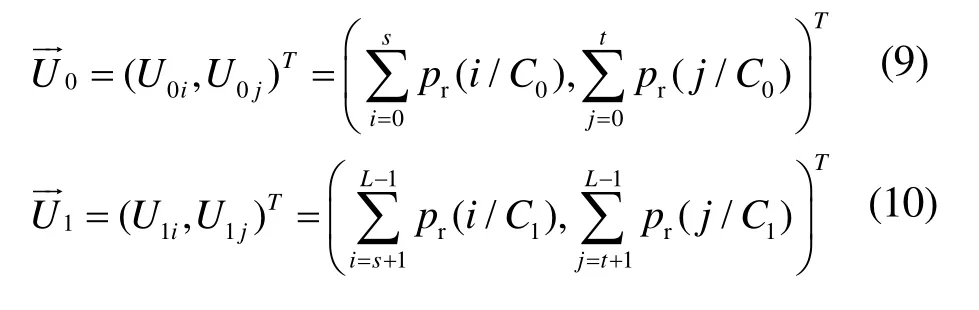
二维直方图上总的均值矢量为

所以可合理地假设在两个区域:i=s+1,...,L-1;j=0,…,t和i=0,...s;j=t+1,...,L-1 有 pij≈ 0 。此时关系式成立。
定义一个类间的离散度矩阵

使用SB的迹作为类间离散测度,有
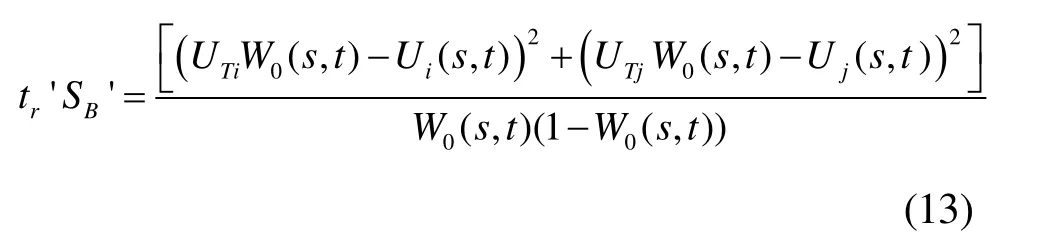
当trSB(s',t')= max{ trSB(s,t)}时,二维 Otsu阈值分割法的阈值为(s', t')。
1.3 改进的二维 Otsu 阈值分割法
改进后的二维直方图如图2所示。
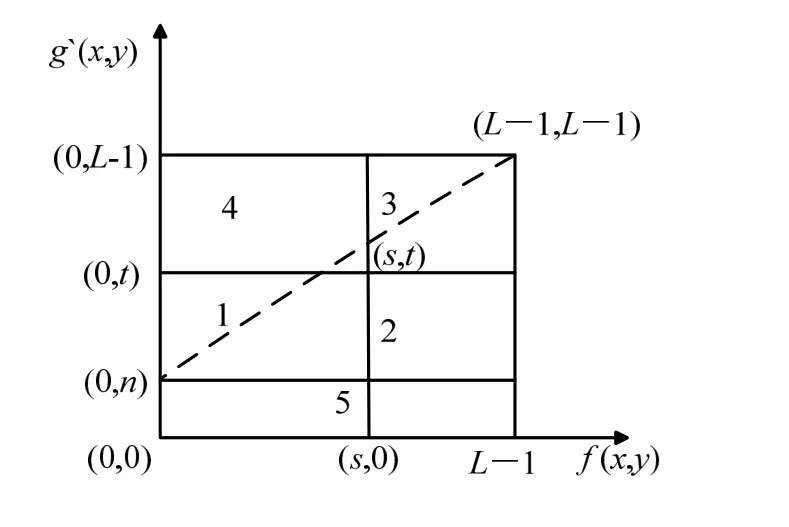
图2 改进后的二维直方图
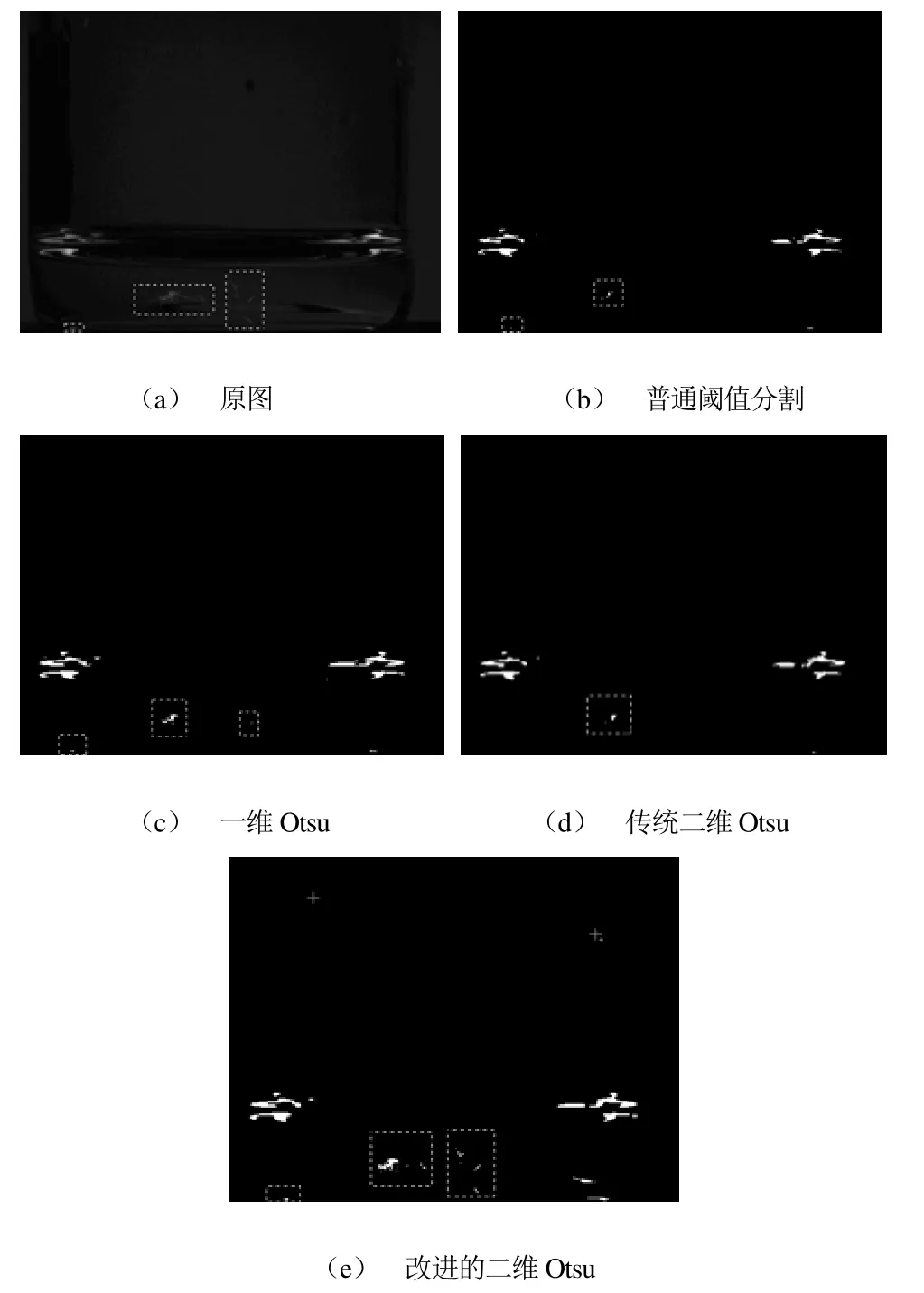
设横坐标f (x,y)为中心像素点的灰度值,g (x,y)为全邻域最大或最小的灰度值。纵坐标采用5×5全邻域中心像素点灰度值与邻域的灰度最大值(或灰度最小值)之差的绝对值的最大值 g`(x,y),则 g`(x,y)=max{|f (x,y)-g (x,y)|}。当f (x,y)和邻域像素点都表示目标像素或背景像素时,把它们相减,得到的绝对值较小。此时,在对分割效果没有影响的情况下,为了减小运算时间,对于t 图3 判断算法流程图 首先判断像素(x,y)是否被标记为待定点,如果不是,寻找下一个符合条件的像素;如果是将判断5×5邻域内是否有目标点,如果没有,寻找下一个符合条件的像素;如果有,先计算中心像素点的灰度值与目标点的最大差值a0,再计算中心像素点的灰度值与所有背景点的最大差值 a1;然后判断两者的差值,若a0>a1,说明中心像素点的灰度值与目标点偏差较大,则将其归属于背景点;若a0 医用药瓶溶液杂质的主要成份为玻璃碎屑、纤维、毛发、蚊虫、药渣等异物。本次使用的仿真图片是由实际灯检机采集的(图4(a))。为了方便描述,对含有杂质的区域使用虚线矩形进行了标识。从图4(a)可以看出,本次杂质主要为纤维等悬浮物,此类溶液杂质的特点为微小、与背景灰度值相差不大、液面噪声较大等。改进的二维 Otsu算法考虑到噪声影响,加强了抗噪性,对目标分割效果有所提高。本次仿真主要是对目标杂质进行图像分割处理,仿真实验环境使用Matlab7软件,仿真结果如图4所示。 图4 各种阈值分割算法 从仿真结果可以看出,普通的阈值分割效果最差,且由于阈值需要手动给出,要重复多次试验才能得到较合理的阈值,实际中不常用,但其运算时间最少;一维 Otsu由于噪声干扰等会产生分割错误,如果采集到的图像清晰,噪声较小也能得到较好的效果,其运算时间也比较短;传统二维 Otsu阈值分割法简单地认为位于阈值附近且像素灰度值与其邻域平均灰度值相差不大的区域出现的概率为零,从而使得算法不够准确,使用二维直方图增加了处理的时间,其所用时间最长;改进的二维 Otsu可以有效地将边缘和噪声中的一些目标像素点区分出来,并分割到目标区域,提高了算法的抗噪性,减小了错误划分,加强了图像的分割效果。 本文分析和比较了一般的阈值分割、一维 Otsu和传统二维 Otsu的图像分割算法,进一步提出了一种改进的基于二维 Otsu分割算法。可以有效地将边缘和噪声中的一些目标像素点区分出来,并分割到目标区域,提高了算法的抗噪性。无论是从理论上分析,还是从仿真实验结果来看,都表明该算法具有较强的抗噪性能,与传统二维 Otsu相比,处理时间也有所减少。 [1] Akira I,Takayuki M,Shigehiko T,et al.Detection of foreign substances mixed in a plastic bottle of medicinal solution using real-time video image processing [C], Proc 14th International Conference on Pattern Recognition. Australia:IEEE Computer Society,1998,2:1646-1650. [2] 李伟.基于机器视觉的安瓿内可见异物检测系统的研究[D].北京:清华大学,2010. [3] 肖方良,王耀南,章捷,等.安瓿制剂中的可见异物实时视觉检测系统研究[J].计算机测量与控制,2010,18(2):295-298. [4] 刘健庄,栗文青.灰度图象的二维Otsu自动阈值分割法[J].自动化学报,1993,19(1):101-105. [5] 梁光明,刘东华,李波,等.二维Otsu自适应阈值分割算法的改进[J].自动化技术与应用,2002,21(5):43-47. [6] 郝颖明,朱枫.二维Ostu自适应阈值的快速算法[J].中国图像图形学报,2005,10(4): 484-488.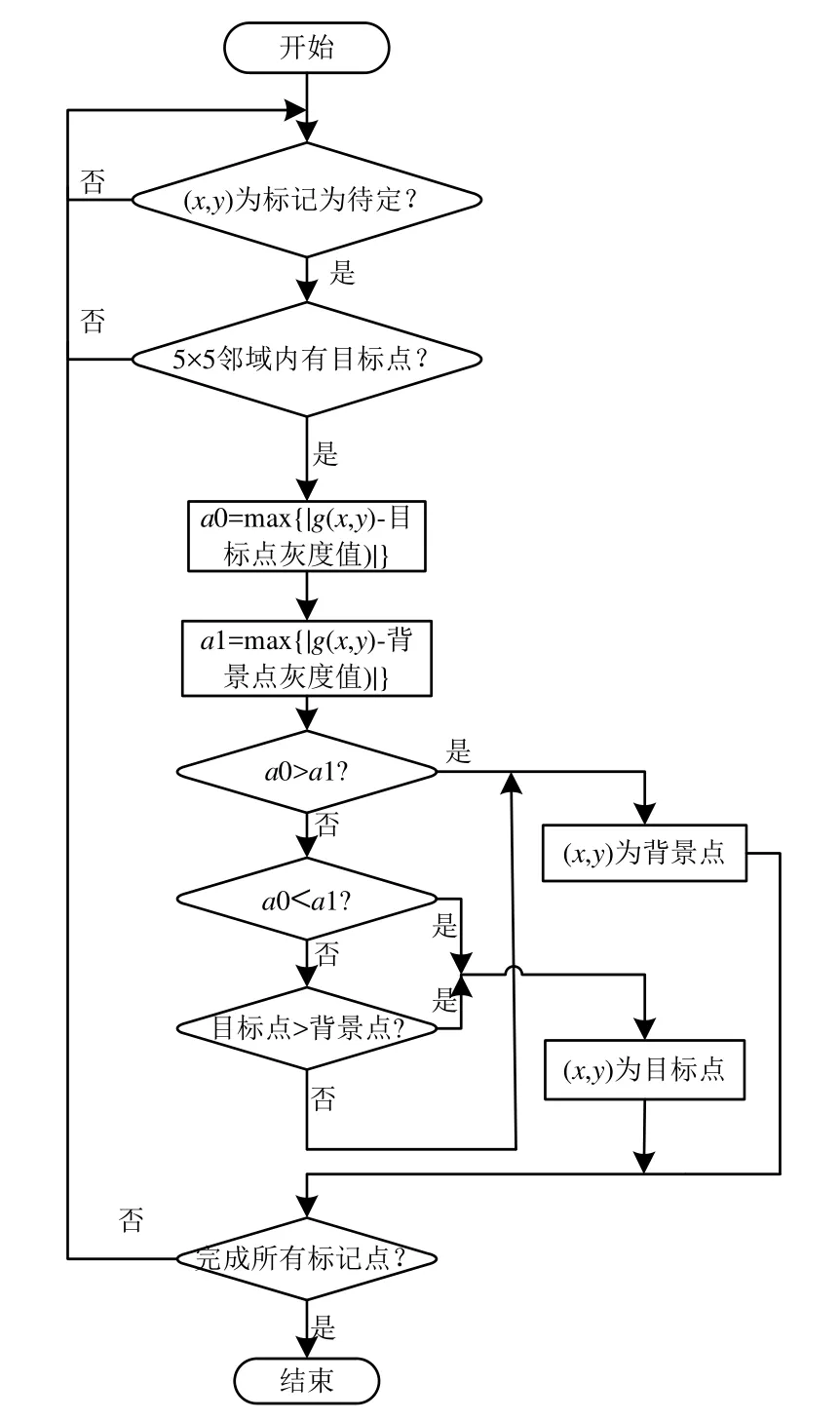
2 仿真实验结果及分析
3 结论
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28农业工程学报(2022年7期)2022-07-09现代电子技术(2021年1期)2021-01-17安徽电子信息职业技术学院学报(2020年5期)2020-11-13摄影之友(影像视觉)(2018年12期)2019-01-28微型电脑应用(2019年1期)2019-01-23计算机应用与软件(2018年12期)2018-12-13电脑知识与技术(2018年35期)2018-02-27自动化学报(2017年4期)2017-06-15自动化学报(2017年11期)2017-04-04
