
基于STM32的深海生物取样监控系统设计
2012-10-08 12:12徐开洁刘敬彪盛庆华
杭州电子科技大学学报(自然科学版) 2012年6期
徐开洁,刘敬彪,盛庆华
(杭州电子科技大学电子信息学院,浙江杭州310018)
0 引言
研究海洋生物的物种多样性和遗传多样性是挖掘和利用海洋生物资源、揭示海洋生物和人类基因发展的关键[1]。而生物拖网作为目前主流的深海生物取样装置仍然处于一种纯机械式的作业[2],所以有必要为深海生物拖网加装相应的传感器设备、视频监控设备、智能控制系统,以使得甲板操控人员能实时远程控制拖网作业和获取生物拖网在水下的动态信息,从而极大的提高了深海生物取样作业的效率和成功率。针对目前深海生物取样器存在的不足,本系统通过光电复合缆连结甲板控制单元和水下控制单元,实现了深海生物拖网取样的直视监控,远程操作等功能,为深海生物取样装上了眼睛和大脑。
1 系统工作原理概述
深海生物幼体取样装置的系统整体结构框图如图1所示。驱动舱负责各层网网口开闭电机的驱动控制和安装在网口的到位传感器的状态监测等[3]。漏水检测电路实时监测驱动舱是否发生漏水事故。流量计测量拖网网内总水量和拖网网外海水的流速。通过离底高度计可以获取生物取样的深度[4]。在本系统上挂载了CTD传感器,取样水域的温度、盐度和深度等数据通过光纤发送到甲板控制单元。
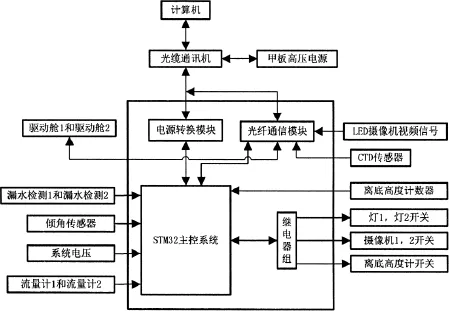
图1 系统框图
2 系统硬件设计
驱动仓驱动电路,主控系统完成对拖网整体的作业状况的远程甲板控制和视频监控。两个驱动舱分别完成对拖网作业动作的具体实现。如图2所示为驱动舱控制电路简要框图。两个驱动舱的微控制器采用 STM32F107VCT6[5],控制系统通过485总线组网的形式和主控系统进行通信。由于生物取样拖网系统采用了高保真保压取样器,所以通过压力传感器实时监测保真保压舱的压力可以提高深海生物取样的成活率。4个电机驱动电路包括电机开关和电机转速调整,并将电机开关和转速调整的结果状态信息写入到上传的数据帧中,发送到甲板上位机监控平台。在拖网各层网口的上限位和下限位加装到位传感器,通过STM32来读取各传感器输出的电平信号,可以有效的控制拖网的开闭。
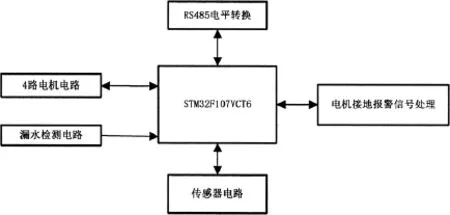
图2 驱动舱电路结构框图
3 系统软件设计
3.1 主控系统软件设计
主控软件主要包括:(1)系统的初始化;(2)判断是否有驱动舱漏水。根据ADC采样的电压计算的漏水感知带电阻的阻值,如果小于一定的阀值,则立即切断驱动舱供电,并将报警信号发送到甲板上位机,上位机立即报警;(3)如果未发生漏水,则读取主板上的各个传感器电压以及控制继电器组的IO电平,并将此时主板的状态信息写入到数据帧中通过串口发送到上位机控制系统;(4)串口中断收到数据,则校验数据帧,如果正确则执行上位机发送的指令,并把执行后的主控系统的状态写入上传数据帧,通过串口发送到上位机。软件流程图如图3所示。
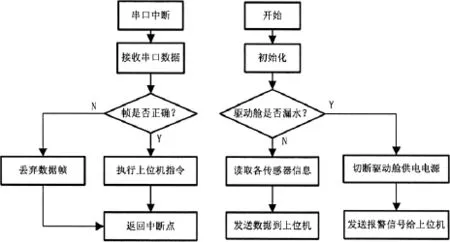
图3 主控软件流程图
3.2 驱动舱软件设计
驱动舱软件设计主要完成:(1)初始化系统;(2)检测是否发生驱动舱漏水事故和电机接地事故,如果发生上述事故,将报警信号上传到甲板上位机并且切断驱动舱电源;(3)如果未发生上述事故,并且收到下传数据,则校验收到的数据数据帧的正确性;(4)如果收到正确数据帧,则判断是数据帧ID是否为本驱动舱数据帧,如果不是则丢弃该数据帧;(5)如果收到的数据帧是本驱动舱数据帧,则判断数据帧的指令字节,如果是下传执行操作的指令,则执行相关指令,然后将执行后的本驱动舱的状态数据写入上传数据帧,发送到甲板上位机。驱动舱软件流程图如图4所示。
4 系统调试
调试过程如下:将主控系统和两个驱动舱独立供电,测试的甲板上位机界面如图5所示。图中主控系统控制区打开摄像机、并且打开视频监控,显示由摄像头返回的视频图像,同时关闭其他开关。当前网内和网外流量均为1.0。主控舱的漏水报警显示未报警。驱动舱1控制区已经成功打开继电器1、继电器2、继电器3、24V电机供电开关、电机控制器供电开关、传感器供电开关。拖网上的传感器LED灯指示了网杆在上限位的位置。驱动舱2的控制类似驱动舱1。报警区包括了电机接地报警、传感器接地报警、驱动舱1漏水报警、驱动舱2漏水报警,图5中显示当前未发生报警情况。监测区主要是对离底高度、供电电压、船的航速、精度、纬度、水深、当前倾角和取样水域的温度、盐度、深度的监测和显示。由于是在实验室环境的测试,所以有些数据暂时无法取得。CTD数据的解析和获得如图6所示,其中第一列为CTD电池电压,第二列为水压力,第三列为当前温度,第四列为盐度,最后两列为测试的时间和日期。此时在实验室环境下测试得到室内空气温度为28.4℃,而由于该CTD测试时未装电池,所以测试的电压为0.35V左右。
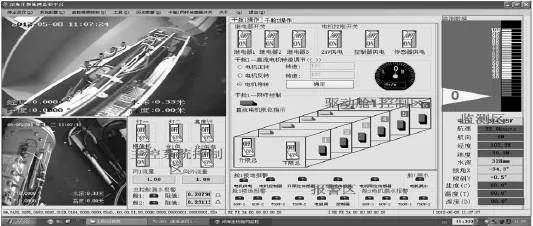
图5 上位机界面1
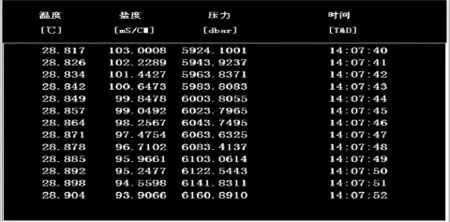
图6 CTD上位机界面
5 结束语
本文基于STM32设计了深海生物拖网取样装置的监控系统,经过测试表明,该系统成功的实现了对拖网的远程视频监控,改善了生物取样作业的盲目性和机械性的缺点,从而将极大提高深海生物取样作业的效率和降低了深海探测的成本,将进一步促进我国深海生物资源探测的快速发展。
[1]王春生.中国首次环球打样科学考察[J].科学,2006,58(4):5-7.
[2]葛朝平.深海近底层多网分段/分层生物幼体保压取样器研究[D].杭州:浙江大学,2008.
[3]王煜东.传感器应用电路400例[M].北京:中国电力出版社,2009:1-9.
[4]Keith Jack.Video Demystified(5th Edition)[M].America:Newnes,2007:6.
[5]李宁.基于MDK的STM32处理器[M].北京:北京航空航天大学出版,2008:10-15.
猜你喜欢
中国新闻周刊(2021年36期)2021-09-30
小哥白尼(趣味科学)(2019年7期)2019-11-16
农村经济与科技(2019年5期)2019-09-01
科学与技术(2019年21期)2019-04-27
作文周刊·小学一年级版(2019年44期)2019-01-08
河北渔业(2018年4期)2018-05-08
中国建筑防水·悦居(2017年7期)2017-09-07
小学生导刊(2017年16期)2017-06-15
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年4期)2017-05-13
