
桥式起重机防摆控制器的设计
2012-10-12 13:28刘惠康代文蕤
制造业自动化 2012年1期
杨 斌,刘惠康,代文蕤
YANG Bin1, LIU Hui-kang2, DAI Wen-rui3
(1.成都理工大学 工程技术学院,乐山 614007;2.武汉科技大学,武汉 430080;3.武钢冷轧硅钢片厂 吊车车间,武汉 430080)
0 引言
桥式起重机作为一种现代搬运机械,是现代工业生产和起重运输中实现生产过程机械化、自动化的重要设备。它广泛地应用于室内外工矿企业、钢铁化工、铁路交通、港口码头以及物流周转等部门和场所从事空中吊运和装卸任务。由于起重机在运行过程中,吊物因惯性或受到外部干扰(如:大、小车的加减速、起动和停车、风力)等影响,会使得吊物离开原有的平衡位置产生很大的摆动。这种摆动不仅使得吊物的装卸难以定位,降低了生产效率,而且还对周围的吊装人员和设备带来严重的安全隐患。因此在生产实际中桥式起重机往往是由经验丰富的专职司机人工操作。本文分析了桥式起重机在三维空间中的数学模型的仿真结果后,提出采用线性二次型最优输出调节器技术构造一跟踪控制器,以实现吊物的精确定位和消除游摆。
1 起重机三维动力学模型
一般地,要获得桥式起重机在三维空间中的数学模型是比较困难的。大、小车的位移,吊物的摆角以及吊物的起升高度都是随时间和场地情况而变化的。因此在很多参考文献中都只考虑了小车这一个运动平面,且钢丝绳的长度为某一定值时的这一简化情况。然而在生产实际中,为提高生产效率,通常大、小车的运动是同时进行的,因此有必要研究桥式起重机在三维空间中的动力学模型。

图1 桥式起重机工作示意图
图1中已经对桥式起重机在三维坐标下,某一时刻的运动状态进行了受力分析。其中fy和fx分别是大、小车所受的牵引力;mg为吊物的重力;l为钢丝绳的长度;β和α分别为大、小车运动过程中吊物在x-o-z和y-o-z投影面上的投影产生的偏角;(x1,y1,z1)是吊物在三维坐标系中的位置。
设起重机在运动过程中某一时刻小车在空间中的坐标为(x,y,0),于是有:
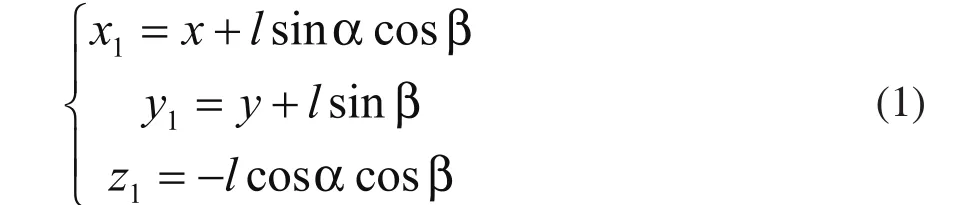
由分析可知,本系统总的动能T为大、小车动能和吊物动能的三者之和,所以T可以表示为:


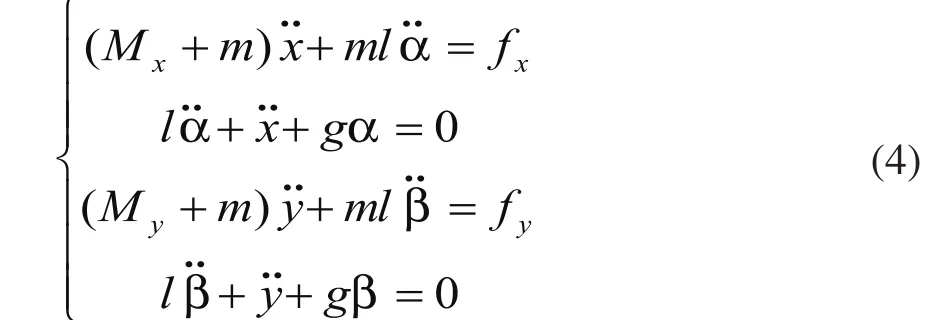
其中Fj为系统在广义坐标qj下的广义力。在忽略摩擦阻力,并充分考虑小摆角(不超过10°)时,可对角度进行如下近似处理:sinα≈α,sinβ≈β,cosα≈1,cosβ≈1,sinαsinβ≈0,将(1)式和(2)式代入方程(3),整理后可得如下方程组:
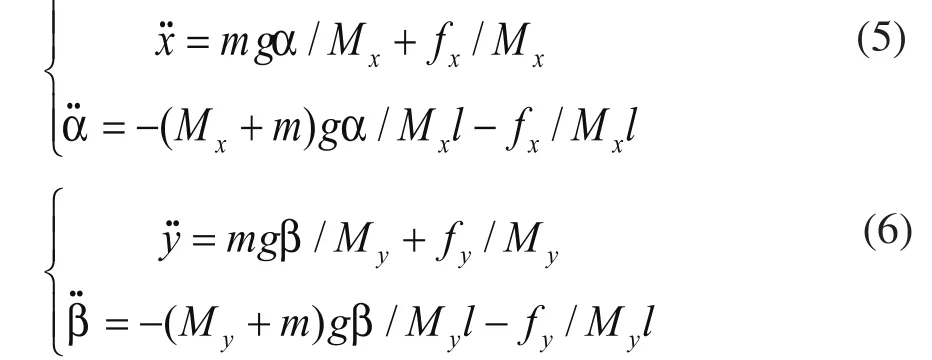
由方程组(5)和(6),大、小车运动系统的状态方程如下所示。
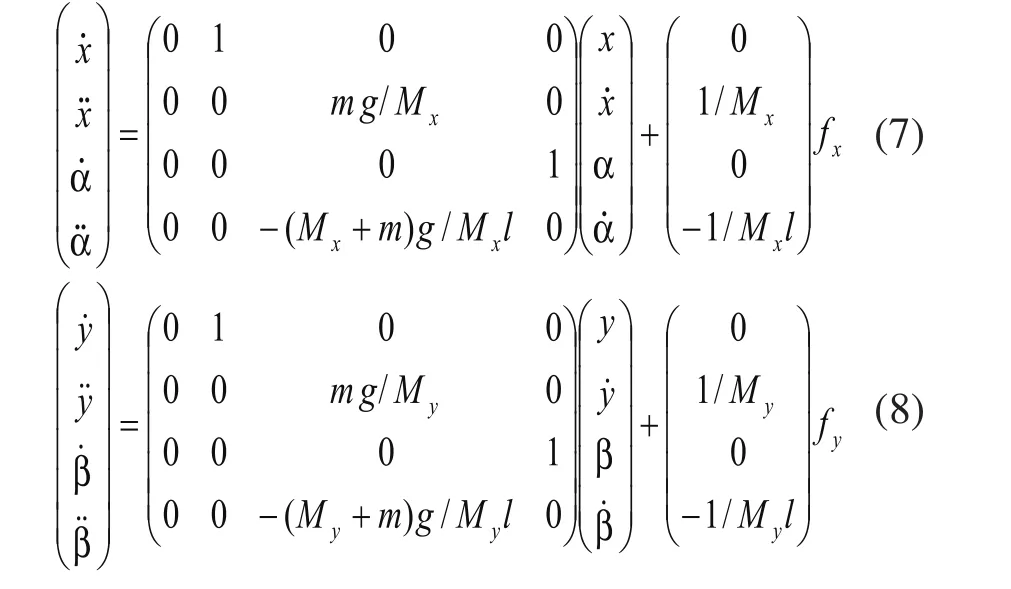
现有QD型10吨双梁桥式起重机的具体参数如表1所示。
将表1中的参数代入方程(7)和(8),并考虑输出方程可得如下状态空间表达式:
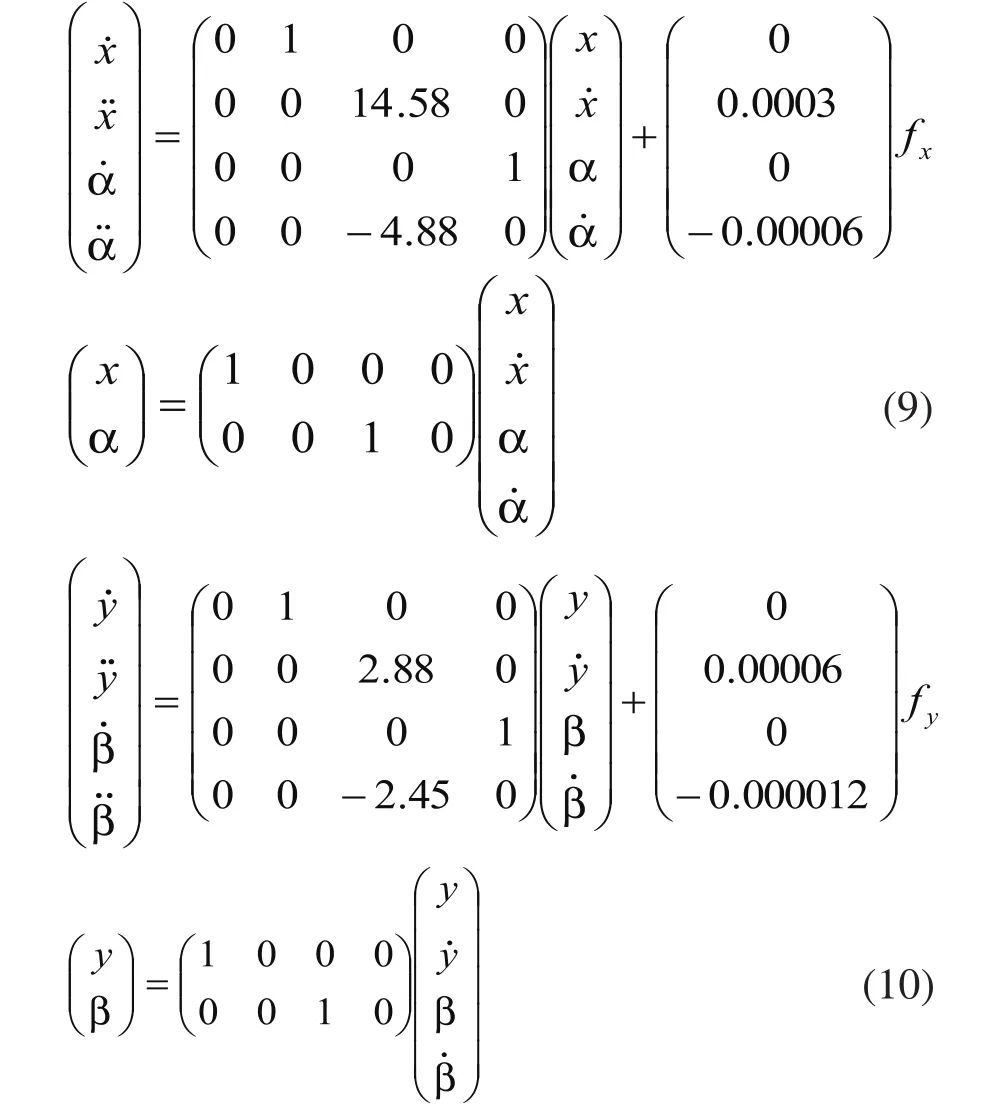

表1 QD-10双梁桥式起重机主要参数
2 系统开环仿真分析
由于大、小车运动方程式实际上在y轴和x轴上已完全解耦,所以可以单独对大、小车的系统结构特性分别进行分析。以小车情况为例,分析结果如下:
根据李雅普诺夫第一法,方程(9)中系统矩阵的4个特征值0、0、±j2.2091全部位于虚轴上,小车系统在平衡点处是非渐近稳定的。对小车开环系统进行仿真,其仿真结果如图2所示。


图2 小车开环控制时的动态过程
仿真结果表明,在开环状态下,小车的位移不断增大,而重物的摆角呈无阻尼振荡。这样一种动态过程显然是不能满足实际控制要求的。类似的仿真结果在大车开环控制系统上也能够获得,这里不再一一赘述。
3 防摆控制器的设计
桥式起重机防摆控制问题实际上是一个跟踪控制问题,其控制目标是保证系统的输出量无静差地跟踪外部给定的输出量 。因此该问题很容易地能够转化为线性二次型最优输出跟踪控制问题,即设计一个最优输出跟踪器。
对于桥式起重机系统的数学模型(9)和(10),考虑性能指标函数:

其中,e(t)= (t)-yr(t)为实际输出量y(t)对给定输出量yr(t)的跟踪误差。于是系统的输出跟踪器的最优控制规律为:

其中u1(t)为状态反馈控制;u2(t)为yr(t)驱动的控制作用;P矩阵满足如下代数黎卡提方程:

而待定向量ξ为:

针对小车运动系统的状态方程式(9),分别取R=1,Q=5×107;应用MATLAB可以方便地求解上述黎卡提方程,并计算出状态反馈矩阵K和输入控制矩阵Ky。
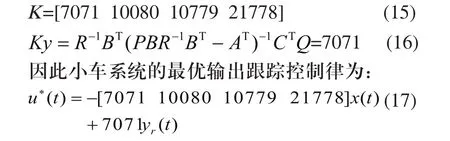
此时的闭环系统的极点为:-0.2962±2.1765i,-0.5625±0.7397i。应用Simulink对系统的动态过程进行仿真,并设置仿真初值为:

当给定输入信号为u=10时,小车运动系统的仿真结果如图3所示。
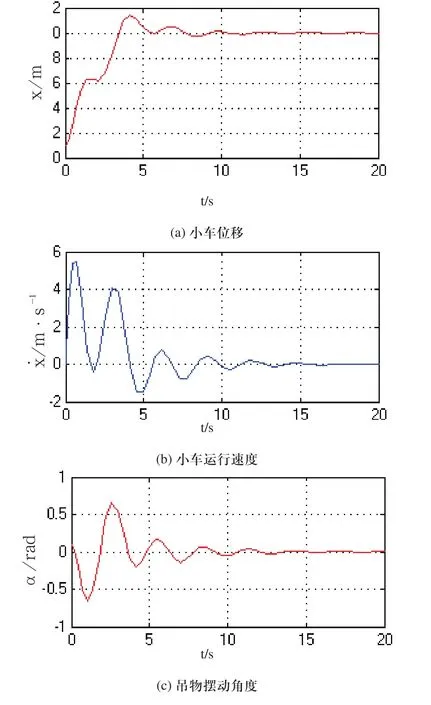
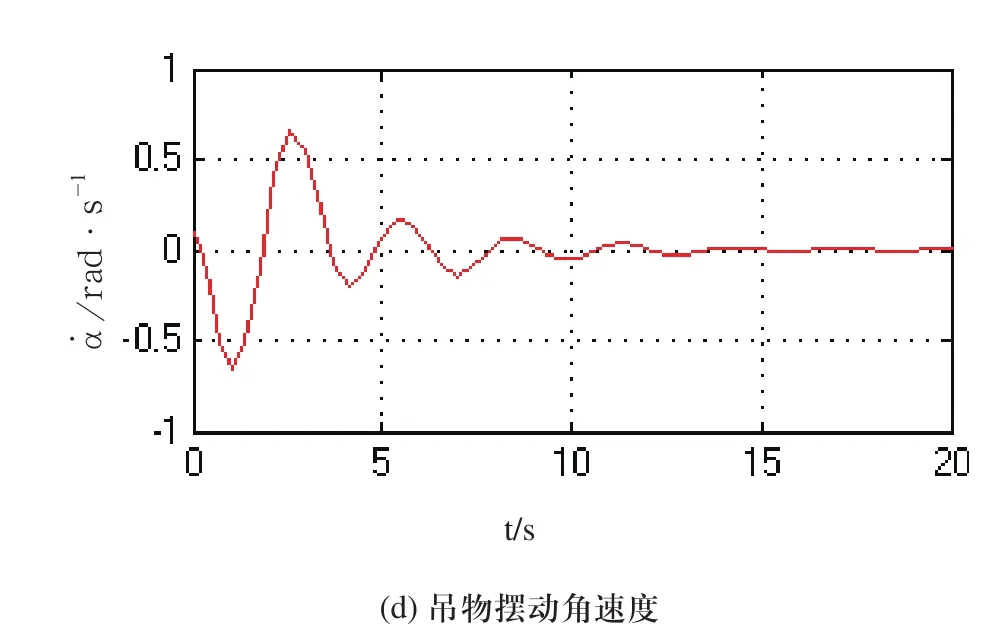
图3 小车系统最优输出跟踪器的动态过程
以上的仿真结果表明,按照线性二次型最优输出跟踪控制设计的桥式起重机防摆控制器完全能够满足任务要求,即小车运动系统在吊物的初始摆角α=0.1rad时,从初始值1m的地方运动到终止值10m的地方,小车能够在17秒钟内运动到终值,并且位移和摆角所产生超调完全在控制范围以内。这充分说明了最优输出跟踪器能够使得小车精确地停车并有效地消除吊钩的游摆。类似的仿真结果在大车运动系统上同样能够获得。
4 结论
本文详细地阐述了桥式起重机在三维空间下的建模方法、开环状态下的动态特性以及最优输出跟踪器的设计原理和它的动态过程仿真及分析。由于桥式起重机被广泛地应用于冶金工业的各个领域,因此其钩头或吊物的精确定位和消除停车后钩头或吊物的游摆对提高生产效率、解放劳动力有着深远的意义。本文中所论述的最优输出跟踪器的防摆控制解决方案,其仿真结果表明该方案可以获得满意的控制效果,能够安全、快速地实现了桥式起重机的定位和消除吊物的游摆,且算法简单、易于实现桥式起重机的无人化远程控制。
[1]YangBin,XiongBin.Application of LQR techniques to the anti-sway controller of overhead crane[J].Advanced materials research,2010,139-141:1933-1936.
[2]Li Maoqing.Controller design for 2-DOF under actuated mechanical systems based on controlled Lagrangians and application to the Acrobot control[J].Frontiers of Electrical and Electronic Engineering in China,2009,4(4):417-439.
[3]Nenad Muskinja,Boris Tovornik.Swing up and stabilization of a real inverted pendulum[J].IEEE Trans on Industrial Electronics,2006,53(2):631-639.
[4]Han B,Lin X G.Adapt steady state Kalman gain using the normalized autocorrelation of innovations[J].IEEE Signal Processing Letters,2005,12(11):780-783.
[5]Hou M.Controllability and Elimination of Impulsive Modes in Descriptor Systems[J].IEEE Trans on Automatic Control,2004,49(10):1723-1727.
[6]Masoud Z N,Nayfeh A H,AI-Mousa A.Delayed Position-Feedback Controller for the Reduction of Payload Pendulations of Rotary Cranes[J].Journal of Vibration and Control,2003,9(3-4):257-277.
[7]Omar H M,Nayfeh A H.Gain Scheduling Feedback Control for Tower Cranes[J].Journal of Vibration and Control,2003,9(3-4):399-4l8.
[8]Al-mousa A,Nayfeh A H,Kachroo P.Control of Rotary Cranes Using Fuzzy Logic[J].Shock and Vibration,2003,10(2):81-95.
[9]Jin Ho SUH, Jin Woo Lee,Young Jin Lee.Antisway control of an ATC using NN predictive PID control[C].Proceedings of the 30th annual conference of the IEEE industrial electronics society,Busan,Korea,2004,3:2998 -3003.
[10]G B Kang,Y B Kim,S B An.A new approach to antisway system design for a container crane[C].Proceedings of SICE annum conference,Fukui:SICE Press,2003,2289-2291.
[11]王留芳,曹玲芝,牛超.基于变指数趋近律的起重机自适应滑模控制[J].自动化仪表,2010,8:1-4.
[12]曾昭龙,田凯.舰载特种起重机轨迹跟踪吊重防摆控制[J].哈尔滨工程大学学报,2005,26(4):457-461.
猜你喜欢
太阳能(2022年3期)2022-03-29
载人航天(2021年5期)2021-11-20
太阳能(2020年3期)2020-04-08
当代水产(2020年2期)2020-03-17
科技风(2019年20期)2019-10-21
当代工人·精品C(2019年2期)2019-05-10
少先队活动(2018年5期)2018-12-29
炎黄地理(2018年7期)2018-10-20
医药前沿(2018年23期)2018-07-26
阅读(科学探秘)(2018年4期)2018-05-14
