
舰炮CIWS对反舰导弹末端机动的航迹处理研究
2012-10-13 07:59李陆冀钱海俊圣钱生
舰船电子对抗 2012年1期
陈 斌,李陆冀,钱海俊,圣钱生
(海军指挥学院,南京211800)
0 引 言
高新科技的飞速发展为反舰导弹的攻、防都提供了新的机遇。反舰导弹的末端变轨机动能力越来越强,如何进一步提高舰炮近程武器系统(CIWS)抗击末端机动反舰导弹的作战效能是舰艇反导装备发展的热点、难点问题。舰炮CIWS航迹处理的精度是影响整个系统精度的重要因素,本文通过计算机仿真,针对典型反舰导弹的末端机动航路,研究分析如何近一步提高航迹处理的精度和反应速度,从而提高舰炮CIWS对反舰导弹的作战效能。
1 典型导弹攻击模式
当前反舰导弹的典型攻击模式主要有:
(1)掠海飞行弹道,以法国的“飞鱼”反舰导弹为代表,其特征是在进入攻击阶段以后降低掠海高度,以小角度或基本水平的末弹道完成攻击;
(2)末端跃升俯冲攻击弹道,以美国的“鱼叉”反舰导弹为代表,经掠海巡航飞行段,在距离目标舰几千米时突然跃起,进行大角度的俯冲攻击;
(3)水平机动攻击弹道,反舰导弹在水平面做蛇形机动或程控变轨机动;
(4)复合攻击弹道,反舰导弹首先在水平面做水平机动,临近目标时做末端跃升俯冲攻击。
从航迹处理的角度看,模式1的机动性最弱,而模式4是2、3两种机动模式的结合,机动性最为复杂,因此本文主要研究模式4下的航迹处理问题。
2 舰炮CIWS对典型导弹航路的航迹
2.1 典型导弹航路仿真
参考典型导弹攻击模式[1-3],设定反舰导弹航路:假设9 000m外雷达发现确认导弹目标,雷达观测坐标为(-9 000m,0rad,0.034rad)。1s后目标由巡航转为机动,在海平面方向做历时7.7s的蛇形规避机动,最大过载10g,机动完成后转入比例导引,3.3s后目标进入攻击末端,实施最大过载为10g的跃升俯冲攻击。跟踪过程历时15s,导弹速度600m/s,整个跟踪过程以我方舰船质点为参考坐标原点。目标航迹详见图1。

图1 目标三维航迹曲线
可见以上航路是典型的复合攻击弹道,导弹首先在水平面做水平机动,临近目标时做末端跃升俯冲攻击,机动、非机动交替出现,若试图准确考察导弹机动对不同滤波器跟踪性能的影响,则需拆分水平机动和跃升俯冲机动航路分别单独滤波。
2.2 滤波器参数设定
(1)卡尔曼滤波器:选取匀加速(CA)模型作为目标跟踪模型。
(2)α-β-γ 常增益滤波器:滤波增益 K 选取:

(3)当前统计模型(CS)算法:自相关系数a=1/3 0,最 大 加 速 度amax=9 8m/s2,a-max=-98m/s2[5]。
(4)交互式多模型算法:采用匀速(CV)模型、CA子模型集和CV、CS子模型集以及CV、CA、CS 3个模型作为子模型集分别组成3个滤波器[6]。

2.3 仿真实验过程
设雷达采样间隔T=0.05s,测距误差ργ=20m,测角误差ρφ=2mrad,ρθ=2mrad,仿真平台MATLAB 7.10,经50次Monte Carlo仿真得:
(1)在导弹2个主要机动段范围内各滤波器的位置均方根误差(RMSE)如图2所示。

图2 导弹2个主要机动段的滤波位置均方根误差
图2(a)为0~9s水平机动段,采样点1~180,纵轴单位为m;图2(b)为11~15s跃升俯冲段,采样点220~300,纵轴单位为m。
(2)各滤波算法滤波平均误差和周期平均耗时运算结果见表1。
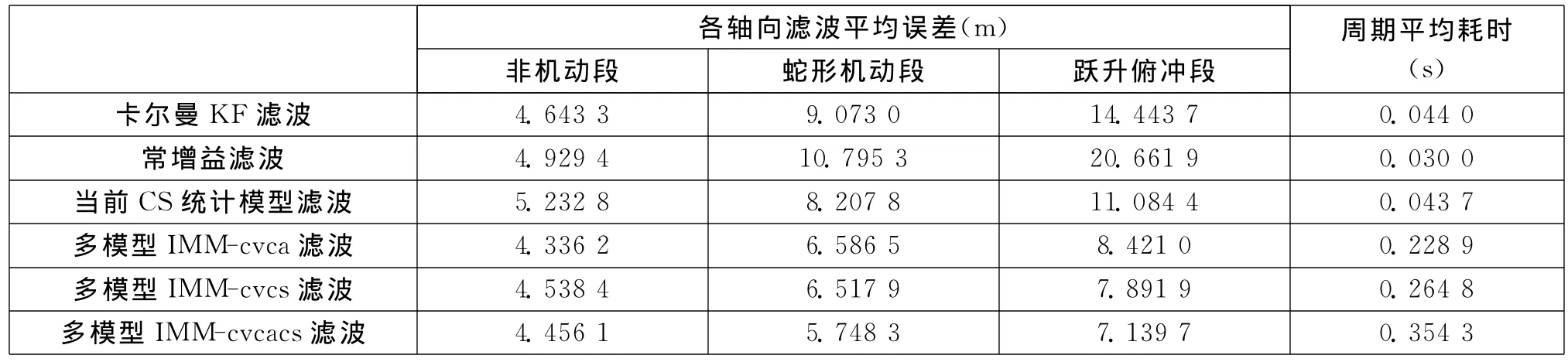
表1 各算法对导弹跟踪精度和周期耗时
通过以上图表的分析,可以看出,卡尔曼滤波算法在非机动段跟踪精度尚好,但目标机动后跟踪精度可见明显波动;α-β-γ常增益滤波总体精度在几种算法中最差,但用时最短,计算量最小;当前统计模型滤波算法在目标机动段跟踪效果最好,但其在非机动段表现不佳。
使用了匀速、匀加速、当前模型3种模型作为子模型集组合的3种多模型算法相比前面KF、α-β-γ、CS算法跟踪精度有较明显优势。3种多模型算法跟踪精度相近,其中使用匀速、匀加速、当前模型3个子模型组合的多模型算法精度相对较好,由匀速、匀加速两模型组成子模型集的多模型算法在3种多模型算法中用时最短。虽然相比之前的3种单模型算法,交互式多模型算法计算量增大、耗时相对较多,约1个数量级大小,但考虑到现代数据处理资源运算性能大幅提高,以多模型算法的优秀滤波性能,其在CIWS工程实用中的价值应不容忽视。
3 结束语
舰炮CIWS航迹处理是一项非常复杂的系统工程,本文围绕反舰导弹经典航路使用多种滤波算法进行仿真实验,对比分析多种滤波算法对CIWS导弹跟踪效果的影响,提出了CIWS航迹处理工程实用的几点建议,为提高CIWS跟踪反舰导弹末端机动航路的性能提供了参考。
[1]李鹏,胡炎.反舰导弹典型运动建模与仿真[J].计算机仿真,2010,27(5):46-48.
[2]隋先辉,董受全,王少平,孙玉明.新一代的反舰导弹及其应用技术[J].战术导弹控制技术,2010,27(1):36-39.
[3]刘剑威,吴传利,徐国亮.反舰导弹典型攻击模式及运动仿真研究[J].指挥控制与仿真,2006,28(5):47-49.
[4]何友,修建娟.雷达数据处理及应用[M].北京:电子工业出版社,2009.
[5]王洋.基于自适应滤波的机动目标跟踪算法研究[D].哈尔滨:哈尔滨工业大学,2008.
[6]陈利斌,佟明安.机动目标跟踪的交互式多模型自适应滤波算法[J].火力与指挥控制,2000,25(4):36-38.
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
火力与指挥控制(2020年2期)2020-04-02
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
兵器知识(2017年10期)2017-10-19
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年6期)2016-11-16
海军航空大学学报(2015年3期)2015-11-11
海军航空大学学报(2015年1期)2015-11-11
海军航空大学学报(2015年1期)2015-11-11
