
一类连续非线性系统的动态输出反馈H∞控制器设计
2012-10-27 13:25郭祥贵
沈阳大学学报(自然科学版) 2012年5期
郭 祥 贵
(天津理工大学a.自动化学院电气工程系;b.天津市复杂系统控制理论及应用重点实验室,天津 300384)
控制理论与实践中的一个基本问题是设计反馈控制律,以保证闭环系统具有所要求的动态和稳态性能.最常用的控制器设计方法有状态反馈控制和输出反馈控制两种.然而,在许多工程实践中,系统的状态往往不能直接测量或者通过测量输出信号得到部分信息[1-2],特别是那些只能测量到输出信号的系统,这使得状态反馈控制方案在工程中较难实现.考虑到实施控制的成本和系统可靠性等因素,采用输出反馈控制更具有实际意义[3].目前,针对线性系统的动态输出反馈控制问题的研究已经有了很多相关结果[4-5].
然而,随着科学技术和工程应用的发展,工业控制系统的结构越来越复杂,以及测量变参数的困难、环境噪声等,许多实际工业系统,如化工、冶金、通信、航空航天等,都具有非线性特性,且难以获得它们的精确数学模型.由此,针对非线性系统的控制和滤波得到了日益广泛的重视和研究,并取得了许多有意义的结果[6-9].针对非线性不确定系统,文献[6]研究了鲁棒H∞状态反馈控制器设计,而文献[7-9]考虑了可靠滤波器设计问题.需要指出的是,针对非线性控制问题,主要考虑了状态反馈控制.针对非线性系统的动态输出反馈控制问题也得到了一些不错的成果[10-11].其中,文献[10]针对不确定T-S连续模糊系统研究了跟踪控制问题,并给出了基于输出反馈跟踪控制的模型参考.文献[11]基于Lyapunov技术研究了测量非线性系统的输出反馈控制问题,并给出了基于动态输出反馈的状态观测器存在的充分条件.然而,系统中含有非线性因素,使得针对非线性系统的动态输出反馈控制器设计本身具有一定的难度,因此,相关文献相对较少.
本文针对具有非线性不确定的连续非线性系统研究了动态输出反馈控制器的设计方法,所设计的控制器能够保证闭环系统稳定且满足给定的H∞性能要求.提出了一类基于S-过程的方法处理带有非线性不确定的问题,并给出了基于LMI技术[12]的动态输出反馈控制器存在的充分条件.最后,通过仿真算例说明了本文所提方法的有效性.
1 问题描述
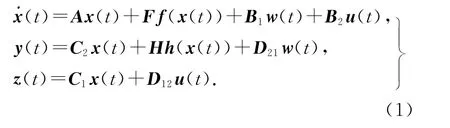
连续非线性系统描述为其中,x(t)∈Rn表示状态向量,w(t)∈Rr表示外部干扰,并假设属于L2[0,+∞),u(t)∈Rm表示控制输入,z(t)∈Rq表示被调输出,且y(t)∈Rp表示测量输出.另外,系统矩阵A,B1,B2,C1,C2,D12,D21,F及H 为具有合适维数的已知常数矩阵.函数f(*)和h(*)是未知的向量非线性函数,并满足如下假设:
假设 假设向量非线性函数f(*)和h(*)是未知函数,并满足如下有界条件:

其中,矩阵M∈Rn×n和N∈Rn×n为已知常数矩阵.为了方便描述,并不失一般性,总假设

注1 自然现象就其本质来说,都是复杂的、非线性的.因此,如何刻画非线性系统的特征是研究非线性系统的前提条件.基于上述事实,本文研究如式(1)所示的连续非线性系统,以便能精确地描述系统建模时出现的不确定性.
注2 假设中所给的非线性条件已经被广泛研究,如文献[6,8].然而上述文献都只是研究了基于状态反馈的鲁棒可靠H∞控制及可靠滤波器设计.
针对系统(1)设计如下形式的动态输出反馈控制器:

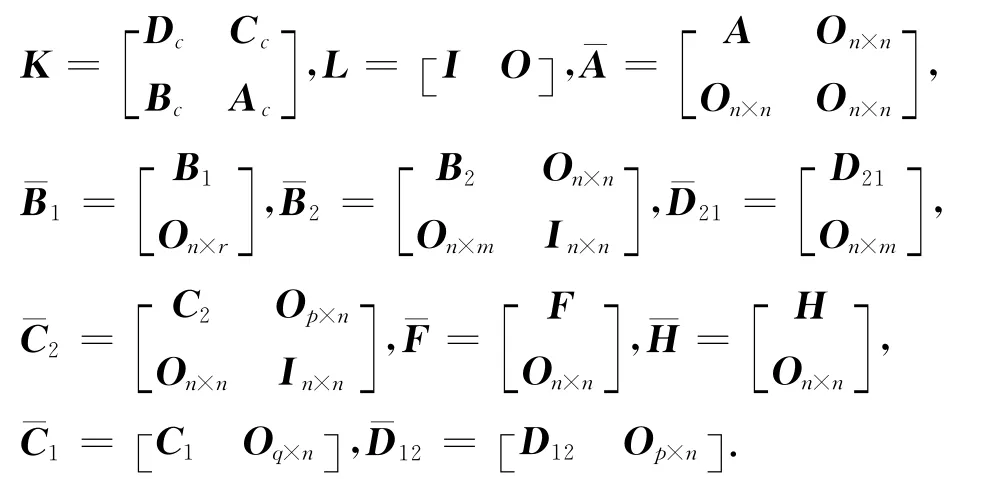
为了方便描述,定义如下矩阵:
那么,闭环系统可以描述如下:
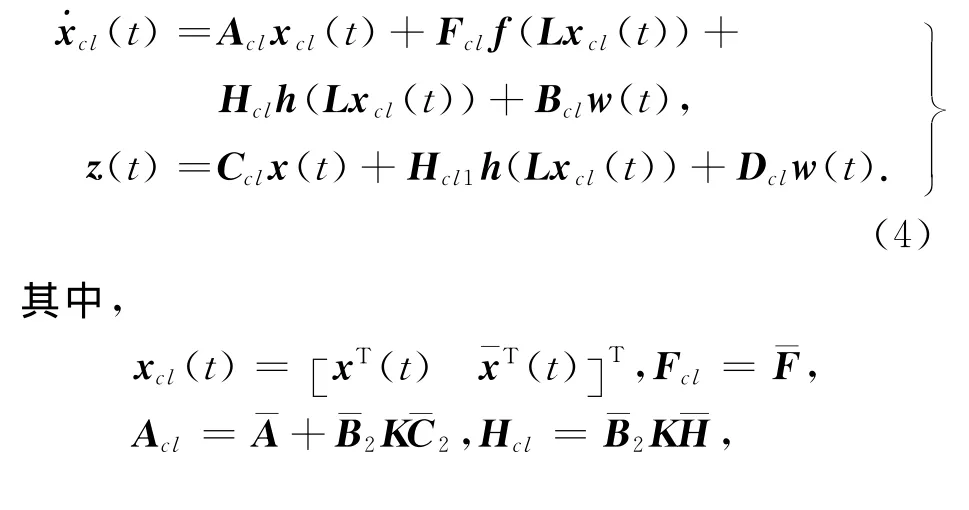

本文的主要目标是设计动态输出反馈控制器(3),使得闭环系统(4)在无外部干扰时是渐近稳定的,同时满足H∞性能要求.
首先,给出如下几个对推导本文主要结果具有重要作用的引理.
引理1 (S-过程)[13]令 T0(x),T1(x),…,Tp(x)为二次函数,其中,x∈Rn,即

式中,Ψi=ΨTi.如果存在非负常数τ1,…,τp,使得式子
成立,那么

成立.
引理2[8]假设f(*)是向量非线性函数,且M∈Rn×n为已知常数矩阵,则由下述条件
‖f(x(t))‖ ≤ ‖Mx(t)‖ (∀x∈Rn)可以推出

成立.
引理3[14-15]给定对称矩阵ψ∈Rn×n以及矩阵P∈Rn×m和Q∈Rp×n满足

那么,当且仅当

成立时,对于合适维数的矩阵X,下述不等式是可解的:

其中,ζP和ζQ分别为矩阵P和Q的零空间.
2 主要结果
2.1 稳定性分析及L2增益分析
下面基于多变量变化及S-过程研究闭环系统(4)的稳定性分析及L2增益分析.首先,给出全维渐近稳定的结果.
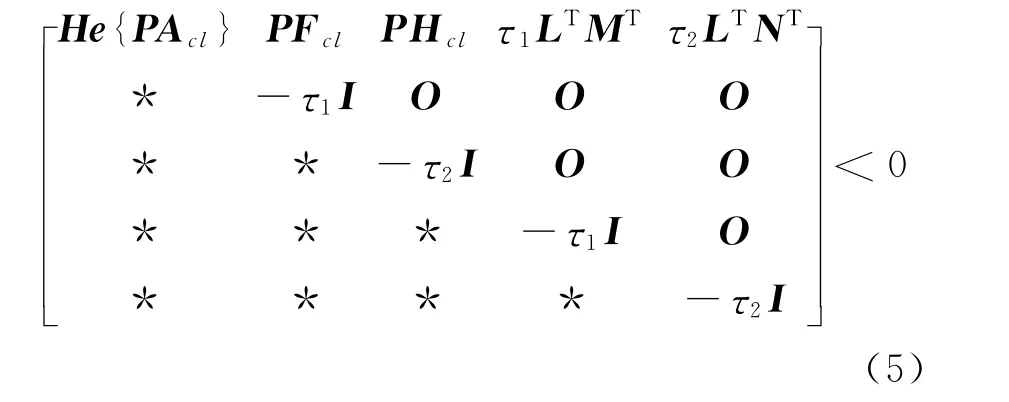
引理4 当w(t)≡0时,对于闭环系统(4),给定矩阵M和N.如果存在矩阵P=PT>0及非负常数τi(i=1,2),使得成立,那么,在无外部干扰w(t)的情况下,闭环系统(4)是渐近稳定的.
证明 选择如下Lyapunov函数:

其中,矩阵P=PT>0为所要求的.
当w(t)=0时,结合闭环系统(4),对上述Lyapunov函数求导可得

由引理2和式(2)可得

由Schur补引理,式(5)等价于如下式子:

那么,结合引理1和式(6),可以得到Ψ0<0.因此,当外部干扰w(t)=0时,闭环系统(4)是渐近稳定的.
在给出本文控制器的设计方法之前,给出如下引理,该引理能保证闭环系统(4)是渐近稳定的,同时满足H∞性能约束.
引理5 对于闭环系统(4),给定常数γ>0及已知常数矩阵M∈Rn×n和N∈Rn×n.如果存在矩阵P=PT>0和非负常数τi(i=1,2),使得
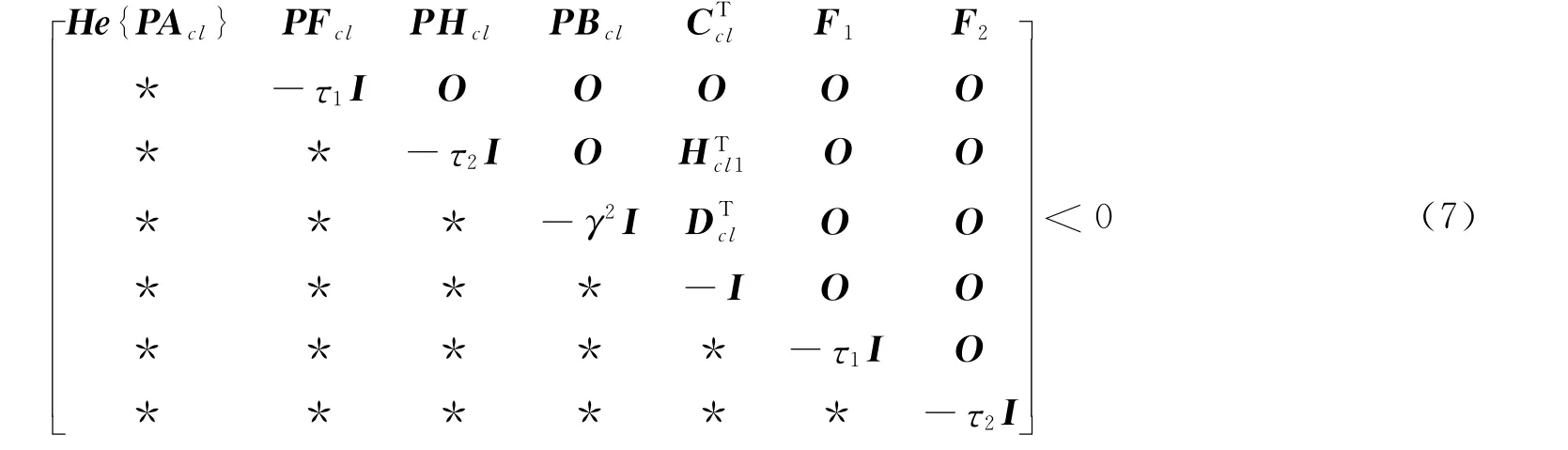
成立,那么,闭环系统(4)是渐近稳定的,同时满足H∞性能约束.其中,F1=τ1LTMT,F2=τ2LTNT.
证明 为了使闭环系统(4)满足H∞性能约束,需要考虑如下性能指标:

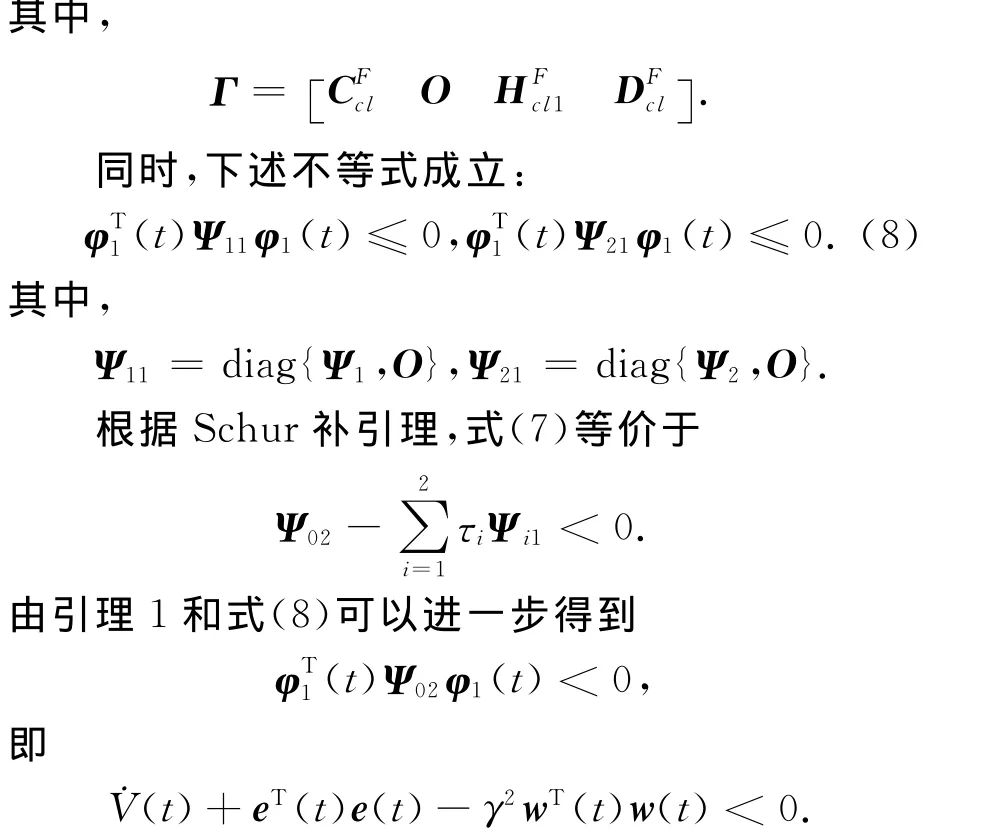
因此,由Lyapunov稳定性理论可以得出条件(7)能够保证闭环系统(4)渐近稳定且同时满足H∞性能约束.
2.2 镇定控制器设计
在无外部扰动w(t)的情况下,下面给出使得闭环系统(4)全维渐近稳定的动态输出反馈控制器(3)存在的充分条件.首先,给出如下定理.
定理1 在无外部扰动w(t)的情况下,如果存在矩阵X>0,Y>0及非负常数τi(i=1,2),使得如下不等式
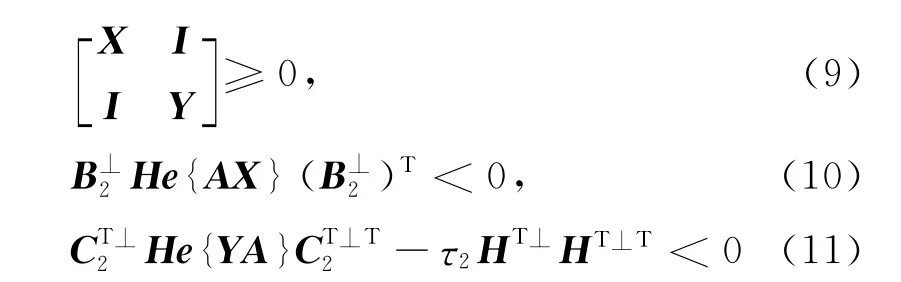
成立,那么,存在如式(3)中的动态输出反馈控制器使得闭环系统(4)渐近稳定.
证明 显然,矩阵不等式(5)可以重新写成如下形式:
由引理3,式(12)成立的充要条件是
为了将所要设计的问题线性化,需要适当的矩阵变换.基于文献[16]中的变量变换技术,将矩阵P和P-1分解成如下形式:

其中,矩阵P和P-1具有合适的维数,并且有U∈Rn×n,M∈Rn×n,V∈Rn×n,N∈Rn×n,X=XT>0∈Rn×n,Y=YT>0∈Rn×n.不失一般性,总假设矩阵M和N 行满秩(具体可参考文献[16]).那么,可以得到


这意味着式(13)中的两个不等式分别等价于式(10)和式(11).
构造如下矩阵:

由PP-1=I,可以得到
那么,可以得出P>0,与式(17)等价.
[15],如果线性矩阵不等式(10)和式(11)的解(X>0,Y>0)满足如下秩约束:

那么,nc阶(nc≤n)的控制器就可以通过构造得到.选择矩阵U>0和矩阵N,使得

从而,通过求解矩阵不等式(12)得到镇定输出反馈控制器K.
注3 显然,式(19)的一个特解是N=U=Y-X-1.
2.3 动态输出反馈H∞控制器设计
下面通过矩阵线性化变换方法来设计动态输出反馈H∞控制律.首先给出如下定理.
定理2 给定常数γ>0和已知常数矩阵M和N,如果存在矩阵X>0,Y>0及非负常数τi(i=1,2)满足式(9)及以下矩阵不等式:


那么,闭环系统(4)是渐近稳定的,且L2增益小于或等于γ.假设矩阵不等式(9)和式(20)存在解),那么,所期望的动态输出反馈控制器(3)的增益矩阵可以由式(21)得出:

式中,矩阵 M∈Rn×n和N∈Rn×n满足式(18)中的约束.
证明 如果存在矩阵P>0使得不等式(7)成立,那么,闭环系统(4)是渐近稳定的,且从w(t)到z(t)的L2增益小于或等于γ.
将矩阵P和P-1分解成如式(14)的形式,并构造如式(15)中的矩阵J1和J2.
对控制变量作如下线性变换:

注4 需要指出的是,对于给定的τ1和τ2,定理2中的条件将是线性的.相关的讨论及如何选择参数τ1和τ2可以参考文献[17-18]等.因此,可以通过凸优化算法实现γ的最小化.
基于定理2,动态输出反馈控制器可由如下算法获得:
S1 固定参数τ1和τ2,使得条件(20)转化为线性条件.
其中,最小干扰抑制为γ*.
S3 获得最优γ值及控制器增益.
3 仿真例子
下面给出数值例子说明所设计的动态输出反馈控制策略的有效性.考虑不稳定非线性连续系统(1)具有如下矩阵参数:

可以很容易判别出开环系统是不稳定的.因此,本文的目标是设计一动态输出反馈H∞控制器,如式(3)所示,使得闭环系统渐近稳定且满足H∞性能要求.给定τ1=5及τ2=1.1,基于算法,最小化定理2中的γ值,可以得到H∞性能γ=0.305 5,其相应的控制器增益矩阵由式(21)求得如下:

为了更加清晰地说明本文所提方法的有效性,给出如下仿真结果.假设系统的初始状态和控制器的初始状态分别为x0=[0.2 0 0.1-0.5],= [ 0000] , 并且假设外部干扰输入wT(t)= [ w1(t) w2(t)]T,其中,

其中,函数f(x(t))和h(x(t))满足非线性约束(2).
图1给出了开环系统的状态响应曲线.从图1可以看出,当没有控制器作用时,开环系统是不稳定的.图2给出了在所设计的动态输出反馈控制器作用下的闭环系统的状态响应,从该图可以看出此时的系统是稳定的.由此说明本文所提控制策略的有效性.

图1 开环系统的状态响应曲线Fig.1 State curve of the open loop system
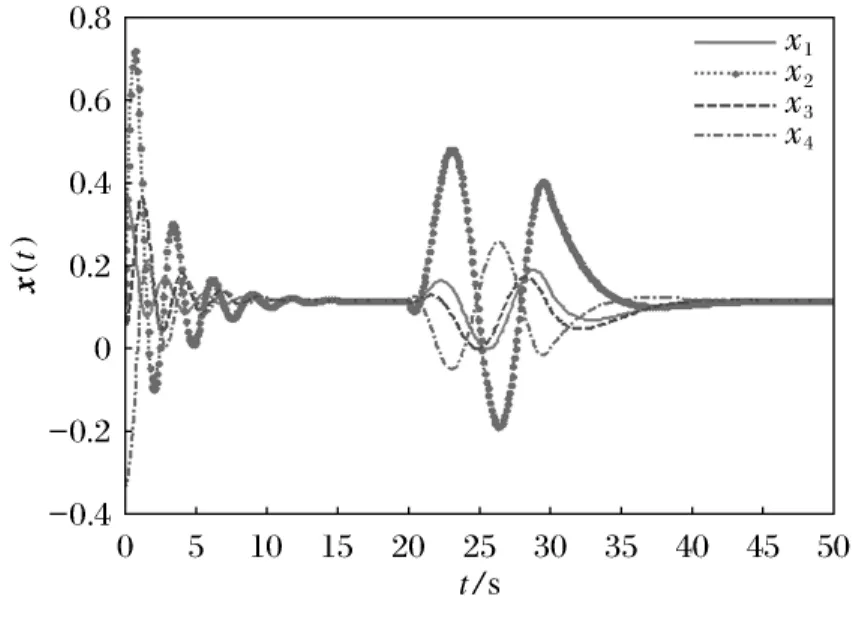
图2 闭环系统的状态响应曲线Fig.2 State curve of the closed-loop system
4 结 语
本文针对一类非线性不确定连续系统考虑了动态输出反馈H∞控制器设计的问题.提出了一种结合S-过程的新的方法来处理非线性不确定的问题.接着,基于线性矩阵不等式技术,给出了控制器存在的充分条件,给出了控制器的具体描述形式,并通过凸优化算法进行求解.最后,通过仿真算例进一步验证了所提方法的有效性.
参考文献:
[1] Chang J L.Dynamic output integral sliding-mode control with disturbance attenuation[J].IEEE Transactions on Automatic Control,2009,54(11):2653-2658.
[2] Silva J M A D,Edwards C,Spurgeon S K.Linear matrix inequality based dynamic output feedback sliding mode control for uncertain plants[C]∥ Proc.of American Control Conference.St.Louis,2009:763-768.
[3] Bara G I, Boutayeb M.Static output feedback stabilization with H∞performance for linear discrete-time systems[J].IEEE Transactions on Automatic Control,2005,50(2):250-254.
[4] 王岩,张庆灵.不确定广义系统动态输出反馈鲁棒H∞控制器设计[J].控制与决策,2002,17(6):948-951.
[5] 关新平,陈彩莲,龙承念,等.不确定离散时滞系统的动态输出反馈鲁棒保性能控制[J].控制理论与应用,2003,20(2):199-204.
[6] Lien C H,Yu K W,Lin Y F,et al.Robust reliable H∞control for uncertain nonlinear systems via LMI approach[J].Applied Mathematics and Computation,2008,198(1):453-462.
[7] Guo X G,Yang G H.Reliable H∞filter design for a class of discrete-time nonlinear systems with time-varying delay[J].Optimal Control Application and Methods,2010,31(4):303-322.
[8] Guo X G,Yang G H.Delay-dependent reliable H∞filtering for sector-bounded nonlinear continuous-time systems with time-varying state delays and sensor failures[J].International Journal of Systems Science,2012,43(1):117-131.
[9] Guo X G,Yang G H.Reliable H∞filter design for discrete-time systems with sector-bounded nonlinearities:an LMI optimization approach[J].Acta.Automatica Sinica,2009,35(10):1347-1351.
[10] Mansouri B,Manamanni N,Guelton K,et al.Output feedback LMI tracking control conditions with H∞criterion for uncertain and disturbed T-S models[J].Information Science,2009,179(4):446-457.
[11] Pomet J B,Hirschorn R M,Cebuhar W A.Dynamic output feedback regulation for a class of nonlinear systems[J].Mathematics of Control,Signals,and Systems,1993,6(2):106-124.
[12] 李一,王阳.分布式容错控制系统设计[J].沈阳大学学报,2011,23(5):5-7.
[13] Iwasaki T,Hara S.Generalized KYP lemma:unified frequency domain inequalities with design applications[J].IEEE Transactions on Automatic Control,2005,50(1):41-59.
[14] Iwasaki T,Skelton R E.All controllers for the generalH∞control problem:LMI existence conditions and state space formulas[J].Automatica,1994,30(8):1307-1317.
[15] Cao Y Y,Lin Z L,Chen B M.An output feedback H∞controller design for linear systems subject to sensor nonlinearities[J].IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications,2003,50(7):914-921.
[16] Gahinet P.Explicit controller formulas for LMI-based H∞synthesis[J].Automatica,1996,32(7):1007-1014.
[17] Xie L,de Souza C E,Wang Y.Robust control of discretetime uncertain dynamical systems[J].Automatica,1993,29(44):1133-1137.
[18] Duan Z S,Zhang J X,Zhang C S,et al.Robust H2and H∞filtering for uncertain linear systems[J].Automatica,2006,42(11):1919-1926.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
数学年刊A辑(中文版)(2021年1期)2021-06-09
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
黑龙江电力(2017年1期)2017-05-17
山西大同大学学报(自然科学版)(2016年4期)2016-11-27
环境科技(2016年5期)2016-11-10
新高考·高一物理(2016年3期)2016-05-18
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
