
某弹炮结合防空武器系统训练仿真平台
2012-11-22 01:16巩建华王卫平
火炮发射与控制学报 2012年2期
巩建华,王卫平,李 舰
(防空兵学院,河南 郑州 450052)
某型弹炮结合防空武器系统是一种作战性能优越的低空防御武器系统,提高了掩护机械化部队作战能力,具有伴随跟进掩护、掩护多目标、拦截多种目标和抗干扰能力强等突出特点。
由于该系统技术密集、结构复杂、价格昂贵、维修难度大,部队在作战训练中存在训练成本高、组训难度大、指挥决策训练困难等问题,特别是部队无法自行组织连协同和干扰条件下的训练。
为充分发挥其弹炮结合防空武器系统的作战效能,解决制约该系统形成战斗力的矛盾,满足部队作战训练需要,进行了“某型弹炮结合防空武器综合训练模拟系统”的研制,从而使训练器材完整,功能完备,模拟逼真,更新训练手段,全面提高战斗人员的操作技能和整体作战能力,降低武器装备的磨损,具有重大的军事效益与经济效益。
1 系统硬件组成与用途
该系统以仿真技术为主要支撑,综合应用计算机技术、网络技术、图形图像技术、信息处理技术和人工智能等高新技术,构建了分布式交互仿真软件框架,实现了被掩护部队—连指挥车—战车的一体化作战指挥训练[1]。
1.1 系统硬件组成
系统硬件由连协同训练导演机、指挥车训练系统、战车训练系统和网络设备组成,如图1所示。
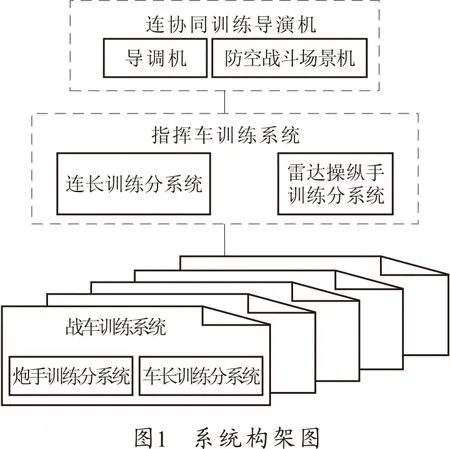
1.1.1 连协同训练导演机
该导演机由导调机和战斗场景显示机组成。
导调机用于协同训练准备阶段,编辑战术想定和训练习题;协同训练时,演播战术想定、适时发送空情信息和空袭目标对地攻击信息、模拟空情图板标绘空情过程、上级指挥所的指挥命令、防空战斗的推演进程指令等。训练结束后,完成训练重演和训练成绩评估。
战斗场景生成机实时接收导调机和对抗双方的实体信息,生成防空作战场景,动态显示作战区域的地形地貌以及装甲车辆、连指挥车、战车、配套车辆和空袭兵器的各种状态,增强训练的真实感。
1.1.2 指挥车训练系统
由连长指挥训练分系统和雷达操纵手训练分系统组成。
连长指挥训练分系统仿真实现连指挥车数据处理系统的功能,接收空情接收机、目标指示雷达、数传终端机提供的目标信息,进行分析处理、威胁判断、目标指示和火力分配,完成连长的作战指挥与操作技能训练。
雷达操纵手训练分系统仿真实现连指挥车指示雷达的功能,发现目标、自动编批、生成航迹、施加干扰,完成雷达操纵手的战斗准备训练和战斗操作训练。
1.1.3 战车训练系统
由车长训练分系统和炮手训练分系统组成。
战车训练系统与战车乘员有相同的战斗空间与环境、人机界面,仿真实现了战车内部主要设备的功能,自动生成空情信息、连指挥员的指挥信息,上报本炮的战斗操作信息,独立进行车长和炮手的操作技能训练,参与高炮连的协同训练。
1.1.4 网络设备
网络设备主要有集线器、网卡和网线,用于连协同训练导演系统、指挥车训练系统和该型高炮训练系统协同训练时的数据通信。
1.2 系统用途
系统的主要用途有:
1)用于某型弹炮结合防空武器连的协同训练。
2)用于某型弹炮结合防空武器连的作战指挥训练。
3)用于战车车长、炮手与指挥车连长、车长和雷达操纵手的操作技能训练。
2 系统软件功能和组成
2.1 系统软件功能
系统软件用于全系统的管理、控制、协调和菜单显示,实时产生三维空袭目标模型和航路,实时仿真雷达、导航、火控等系统的动态过程,实时产生环境和音响效果,记录控制面板上的开关操作过程,并对操作人员的训练成绩进行评价。
2.2 系统软件的组成
系统软件由以下几部分组成:
1)系统管理软件。用于对训练系统的使用进行有效的管理。
2)模拟空袭目标软件。用于编辑空袭训练习题。
3)雷达系统实时仿真软件。用于仿真雷达系统的动态响应。
4)火控系统实时仿真软件。用于仿真火控系统的动态响应。
5)指挥系统实时仿真软件。用于仿真指挥系统的动态响应。
6)操作管理软件。用于记录战斗人员训练操作步骤和两步操作间隔时间。
7)训练评估软件。用于对战斗人员训练成绩进行评估。
3 主要数学模型
3.1 系统搜索目标模型
3.1.1 雷达搜索模型[2]
发现目标概率公式为:
Pr=A[1+1/NSn]N-1exp[-Y/(NSn+1)]
(1)
式中:A为电子干扰修正系数;N为次扫描的脉冲积累数;Y为检测门坎值,Y=N+4.75N1/2;Sn为单个脉冲的信噪比,Sn=(R0/R)4;R为目标距离;R0为信噪比为1时的雷达作用距离。
(2)
式中:σ为雷达反射面积;K为波尔兹曼常数;Pt为发射功率;T为绝对温度;G为天线增益;λ为雷达电磁波的波长;Δf为接收机频带宽;F为噪声系数;L为损耗因子。
3.1.2 目标回波加载
搜索、跟踪目标过程中,当雷达天线所在方向雷达探测距离内有目标时,根据目标的机型、数量,实时在雷达显示器上加载目标回波。目标回波的强度和幅度与目标距离、机型与架数成正比。
3.2 空袭目标对地攻击投弹模型
本训练模拟器采用的空袭模型为:水平攻击的投弹距离和俯冲攻击的投弹距离模型。
目标对地攻击投弹水平攻击的基本控制点为投弹点,水平攻击的投弹距离为:
(3)
俯冲攻击的基本控制点为:进入俯冲点、俯冲拉起点和俯冲角。俯冲攻击的投弹距离为:
(4)
式中:vm为目标速度;H为目标高度;g为重力加速度;C为空气阻力修正系数;λ为俯冲角。
各种航路均可由决定其类型的基本控制点及决定其飞行路线的轨迹控制点进行数学描述,这些关键点形成航路的数学模型。
3.3 威胁度判断模型
目标飞临时间为:
(5)
式中:dj为目标航路捷径;vs为目标径向速度。
目标飞临时间短、架数多、大型机的威胁度大;反之,则小。
3.4 解决命中问题模型
3.4.1 现在点的直角坐标系
目标现在位置的球形坐标(β、ε、D),根据目标相对于雷达阵地的军事坐标换算得到,由1号手训练机传来。火控计算机在直角坐标系下计算射击诸元,因此,用下列公式将球形坐标换算成直角坐标:
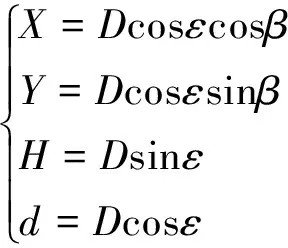
(6)
3.4.2 直角坐标系下的目标运动参数
(7)
3.4.3 目标航向航速参数系
(8)
式中:vD临近时为负,离远为正。
3.4.4 解析正算法求取提前点坐标
提前点坐标在直角坐标系下用解析正算法逐次连续接近求得。开始计算时令:H=Hq、d=dq、D=Dq在射表中用直线插值法查出射弹飞行时间tf。
(9)
式中:Dq为提前点到火炮之间的距离。 当Dqn≠Dqn-1时,用tf=f(Hqn、dqn)查射表,继续用上式计算提前点坐标,直到ΔD=Dqn-Dqn-1<5 m时,停止叠代计算,而后用提前点坐标计算射击诸元。
3.4.5 计算射击诸元
φ根据Hq、dq在射表中用直线差值法查出。
(10)
3.5 训练评估模型
3.5.1 单项训练成绩计算公式
(11)
式中:Fi为单项训练质量成绩;ai为各项评估因素的权因子;xi为各评估因素在评估内容中的得分值。
3.5.2 训练总成绩评估计算公式
(12)
式中:Fz为单项训练质量成绩;Yi为单项训练的权因子。
具体评定时,为简化模型,各单项操作的动作按整数记分,动作过程不允许有错漏、相反的操作,只要前面操作有误,后面操作就不得分。
4 主要支撑技术
4.1 虚拟三维实体及实时控制动态三维实体技术
该系统电视显示器中的三维显示模型运用模型创建工具(如Creator,3Dmax,AutoCAD等)实现建模;使用的矢量数字地图处理软件由作战地域的矢量数据地图生成,运用Adobe Photoshop创建纹理;最后利用DirectX建立三维场景,根据训练习题发布的空情数据进行三维实体控制、场景渲染、声光控制等,虚拟仿真出三维场景效果[3]。
4.2 基于局域网的分布交互式网络通信
战车训练系统与指挥车训练系统、连协同训练导演机协同训练时,需要进行数据通信。为了保障大量数据的快速准确传输,按照局域网通信协议设计的原则和方法,考虑某型弹炮结合防空武器战斗操作训练进程中数据传输的时机与方向,合理设计局域网通信协议,满足了模拟训练中信息流动的畅通、数据显示与报读的时空一致性要求。
该系统采用基于Socket 的API进行开发的网络通信方式,构筑在TCP/IP之上的基于局域网的应用层协议。无链接的数据报协议通过定义满足需求且数据量最小的PDU,保证了网络通信的实时性和数据一致性。
4.3 多传感器数据采集技术
该系统采集的操作数据有:控制操纵杆实施跟踪的状态量、操作转轮的转动量(这两个量均为非线性连续的机械模拟量,需要实时、准确地采集并及时地传输给计算机);人工干预键状态量(需要实时、准确地采集并及时地传输给计算机);开关状态量(为不连续的模拟量,有两种:一种需要实时、准确地采集并传输,另一种不需实时采集)。硬件数据采集装置主要由光电码盘、CPU、地址锁存电路、模数转换电路和数据输出输入电路组成。方位、高低、距离量由光电码盘采集后转换为数字量,读入后编程判断出码盘是正转还是反转,存入存储单元,等待数据的传输。
4.4 空情图板的显示
该系统使用数字矢量地图作为空情图板的基础数据源,从矢量地图获得地理信息,真实显示远方或近方空情图板,并作实时的空情标图。空情图板上显示的内容包括地图、阵地配置符号和坐标网格等,每个想定方案中包含 1至20批目标,根据空情进展的需要还要显示相应的标图符号。由于是实时显示空情信息,所以这些图板上的内容都要以一定的频率进行刷新显示[4]。
分析空情图板的内容,地图、阵地配置符号和坐标网格在一个练习开始后即无变化,所以在练习开始时首先声明一个显示内存,将最初的图板内容存入其中,而对于实时变化的空情信息则随时加入。为保证空情中目标航迹显示的连续性和及时性,显示的刷新周期设定为1 s。在每次图板刷新前,首先将各批目标的运动航迹及标图符号顺序写入显示内存,之后再调入显示设备进行显示,提高了显示速度和系统效率,同时避免了频繁刷新内容引起的屏幕闪烁现象。
5 主要创新点
1)实现了某型弹炮结合防空武器系统主要战斗人员指挥、协同、操作训练的模拟化,解决了该武器系统综合训练的难题 。
2)建立了某型弹炮结合防空武器系统仿真模型,特别是弹炮结合、伴随掩护、协同和对抗训练等模型,丰富和发展了防空作战训练仿真模型体系。
3)构建了完善的某型弹炮结合防空武器训练评估系统,利用多种传感器系统实时采集操作和指挥信息,运用不确定推理、多知识表示、系统学习机制等技术,对模拟训练的过程进行全面、准确的评估。
6 结束语
该训练模拟系统人-机-环境基本与原装备一致,模拟逼真,操作面板接近真实装备,操作的手法要领与在真实装备上操作相同。该训练模拟系统可随时展开训练,不用空军配合,不受天候环境的影响,大幅节省战车主机发动机的使用时间,具有较高的效费比。
参考文献(References)
[1] 马春茂,陈熙,侯凯.弹炮结合防空武器系统总体设计[M].北京:国防工业出版社,2008.
MA Chun-mao,CHEN Xi,HOU Kai. General design of missile/gun antiaircraft weapon system[M].Beijing:National Defense Industry Press,2008.(in Chinese)
[2] 倪忠仁.地面防空作战模拟[M].北京:解放军出版社,2001.
NI Zhong-ren.Simulation of ground-air defense[M].Beijing: PLA Press, 2001. (in Chinese)
[3] 耿维忠.基于Creator和Vega的视景仿真系统的研究与实现[J].东华大学学报,2010.
GENG Wei-zhong.Research and implementation of scene simulation system based on Creator and Vega[J]. Journal of Donghua University, 2010.(in Chinese)
[4] 巩建华,林勇强,李丽君.基于体征变化修正的火控雷达RCS仿真方法[J].火炮发射与控制学报,2011(1):17-20.
GONG Jian-hua,LIN Yong-qiang,LI Li-jun.Fire control radar RCS simulation methd based on symptom change revises[J].Journal of Gun Launch&Control,2011(1):17-20.(in Chinese)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
军事文摘(2022年11期)2022-06-24
军事文摘(2022年11期)2022-06-24
小哥白尼(军事科学)(2022年2期)2022-05-25
新班主任(2022年4期)2022-04-27
军民两用技术与产品(2021年10期)2021-03-16
科学大众(2020年23期)2021-01-18
电子制作(2019年15期)2019-08-27
汽车观察(2019年2期)2019-03-15
小学生学习指导(低年级)(2018年12期)2018-12-29
