
死区效应下逆变器输出电压畸变分析及其补偿
2012-11-22 07:51刘习才
微特电机 2012年12期
刘习才
(同济大学,上海200080 )
0 引 言
电压源逆变器在工业中得到了越来越广泛的应用。在交流传动的一些领域,如无位置传感器矢量控制及直接转矩控制中,电压源逆变器的输出将被用于估计电机速度及位置等状态空间变量。由于逆变器输出电压很难直接测量并且需要额外的硬件,所以通常的方法是通过参考电压矢量来作为逆变器的输出电压用于估计。但是,由于死区及电力电子器件的管压降的影响,逆变器的实际输出电压与参考电压呈现出非线性关系。这影响了估计的准确性,进而影响了电机控制精度。因此定量得出逆变器输出电压的畸变显得尤为重要。
对于如何抑制死区效应,国内外学者做了大量的研究。文献[3]考虑了设置死区时间和功率开关管的开关关闭时间,提出了电压补偿的方法,但是该方法忽略了对电力电子器件管压降的影响且未考虑钳位效应。文献[4]考虑了电力电子器件管压降对输出电压的影响,但是认为管压降在运行过程中为一个常数,未考虑管压降随电流变化。文献[5]综合了死区、开关管的开通关断时间、开关管和续流二极管的导通压降三种影响因素,分析了一相桥臂的畸变电压,但是没给出三相的合成畸变电压。文献[4]估计出零电流钳位区域及输出电压模型,但是输出电压的模型依赖于电机参数,并且在补偿前需要进行PID 整定。
由于以上文献均未给出输出误差电压矢量的较精确的模型,并且未以此给出简单的抑制零电流钳位效应的方法。本文综合开关管开、关时间和设置死区时间以及逆变器管压降的影响,得出了逆变器输出电压的畸变矢量。最后根据输出电压模型提出了在静止坐标系中有效而简单的抑制钳位效应的死区补偿方法。
1 开关时间和死区时间引起的误差电压
任何固态的功率开关管都存在一定的导通时间Ton和关断时间Toff,为了防止上下桥臂直通,需要将理想的SVPWM 驱动信号的上升沿或下降沿延迟一段死区时间Td。
为了方便分析死区时间的影响,下面首先约定电流的方向。如果电流从逆变器流入电动机,则电流方向为正,反之为负。图1 分别为ia>0 和ia<0时的电流方向。由图可知,IGBT 共有4 种工作状态。
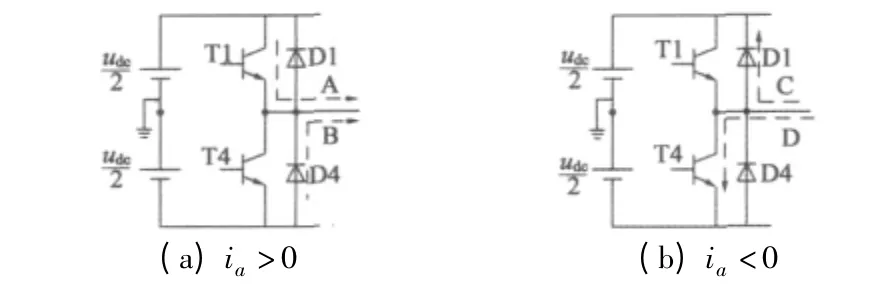
图1 逆变器a 相桥臂电流流向
设a 相电流为ia,a 相桥臂在误差时间M 内产生的误差电压的平均值:[3]

对于其余两相,有着类似的结果。
2 IGBT 管压降的影响
开关三极管和二极管均有正向管压降,其值是由电力电子器件类型和负载电流大小共同决定的。设Vce为开关管的管压降,Vd为续流二极管的管压降。下面分别就a 相电子开关管的通断组合和电流路径及输出电压列表,如表1 所示。
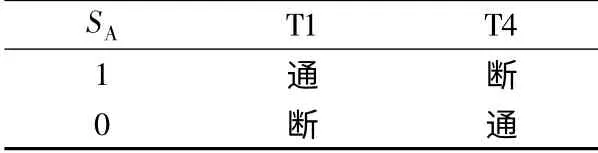
表1 a 相电子开关的通断组合
假定在一个采样周期内电流的极性不变。由表1 可知,当考虑电子器件的管压降时,输出电压:

考虑到udc远远大于(-Vce+ Vd),在此忽略(-Vce+ Vd),因此上式可改写:

实际上开关管管压降Vce和Vd二极管管压降随着电流的增大而增大。为了便于分析,假定Vce和Vd与电流呈线性关系。设开关管电压为Vce0,等效电阻为rce,二极管导通电压为Vd0,等效电阻为rd,则Vce和Vd可由下式表示:
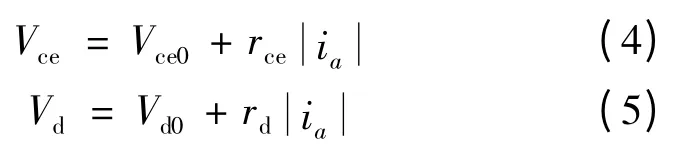
将上式代入式(3)得:

由于中间项的作用相当于电阻的作用,对于负载是永磁同步电动机来说,相当于永磁同步电动机的定子绕组的电阻增大0.5(rce+ rd),因此相当于在逆变器的输出端接上了一个每相电阻均增0.5(rce+ rd)的等效电机。因此对于“等效”电机来说,逆变器的输出:

在一个周期内的平均误差电压:
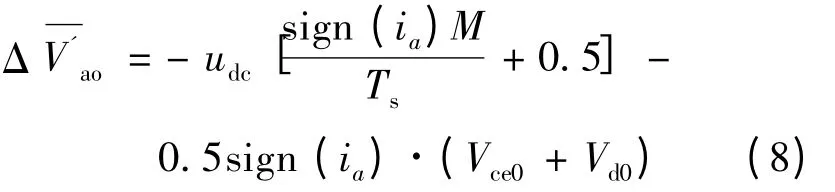
对于等效后的永磁同步电动机,由于电机为三相对称Y 型结构,因此有:
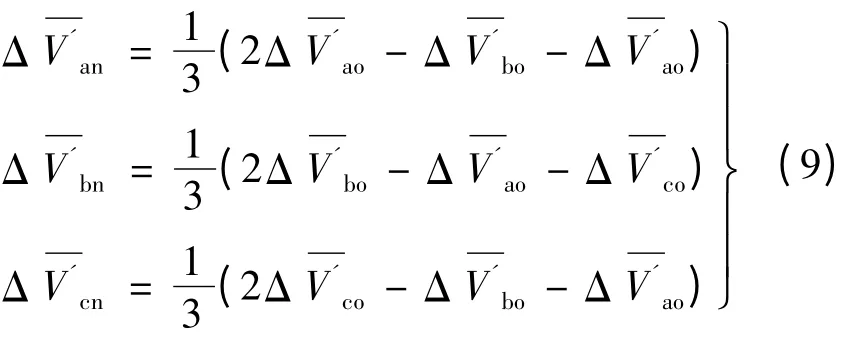
槽孔混凝土浇筑严格遵循先深后浅的顺序,浇筑施工时确保导管底端有足够的尺寸被混凝土埋住,确保防渗墙浇筑质量。同时,应保证连续供料,一次性连续完成,保持导管埋入混凝土的深度不小于1.2 m,但不宜超过3 m,以防发生泥浆混掺或埋管现象;保持全槽段范围内混凝土面均衡上升,上升速度应不低于2 m/h,且高差应控制在0.3 m范围内。
根据上式可求得:

对于其余两相,有类似的结论。
下面运用空间矢量的方法来求解误差矢量的幅值及方向。不失一般性,设电流矢量方向为正负负(+--),代入每相畸变电压电压方程,可以求得畸变电压矢量幅值:
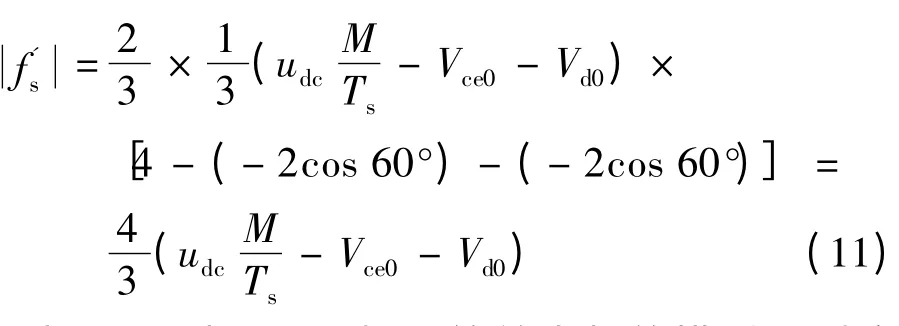
由于以上推导是对于“等效电机的模型”,对应于等效前的电机,每相电压减小(rce+ rd)ip,因此对应于实际电机,减小的电压矢量为
因此对于逆变器,误差电压矢量的幅值:
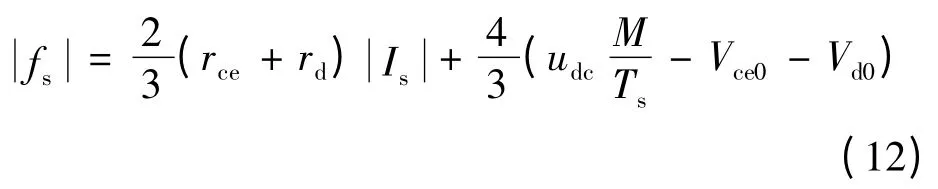
方向与合成电流矢量方向相反。
3 SVPWM 死区补偿策略
3.1 电压补偿法
以上分析得出了由死区效应引起的三相定子绕组相电压的畸变的幅值和大小,为了抑制死区效应,本文使用电压补偿法,根据电流极性产生一个与误差矢量大小相等而方向相反的矢量,从而抵消死区效应。用Vcomi表示补偿电压矢量,则补偿电压矢量与误差矢量Δ V 的关系:

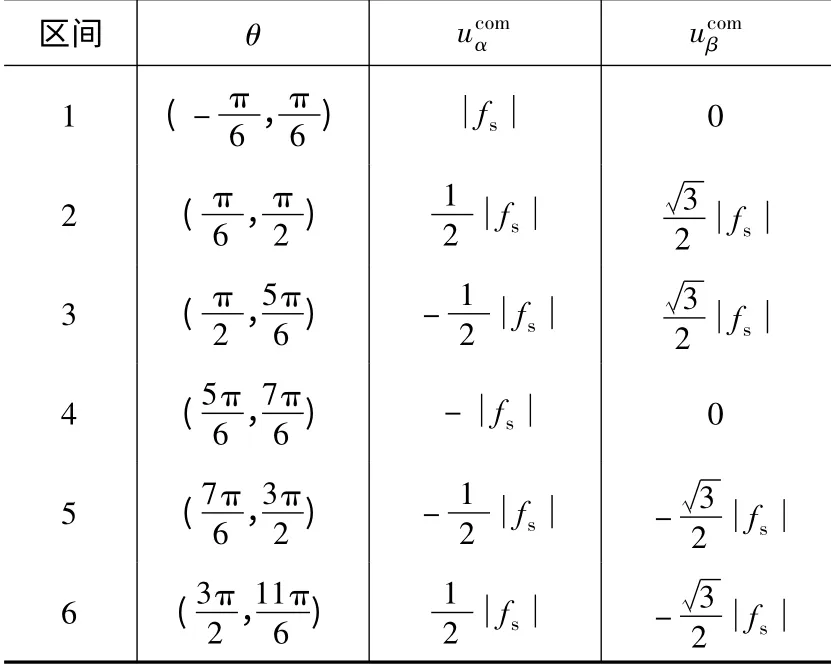
表2 电流矢量角度与补偿电压矢量的关系
3.2 钳位效应的抑制
为了获得更精准的补偿效果,需要考虑实际系统的零电流钳位效应[2]。为了使补偿方法尽量简单,以a 相为例,当ia= 0 时,对a 相不进行死区补偿,以免产生误差补偿,此时求出b、c 两相的误差电压的合成矢量,进而求出补偿电压。类似可对b、c相采用相应的优化补偿方法。
4 实验结果及分析
为了验证提出的这种新型的方法的有效性,选用英飞凌HybridPACKTM1 及配套驱动评估板进行了实验。开关管开通、关断时间分别Ton= 0.12 μs,Toff=0.54 μs,开关管导通管压降为Vs= 2 V,二极管导通压降为Vs= 2.2 V,设置死区时间为Td= 2 μs 。永磁同步电机工作在400 r/min,在负载分别为5 N·m和40 N·m 时对相电流进行采样。将采样后的数据通过MATLAB 作图可得图2~图3 的补偿前后的电流对比图。


从图3 可以看出,受死区时间的影响零电流箝位现象明显,而且在波峰和波谷位置电流波形畸变严重。加入本文提出的死区补偿方法后,波形明显改善,畸变现象得到较好抑制,更加接近于平滑的正弦波,实验结果证实了本文所提出方法的有效性。
[1] Yoshihiro Murai,Tomomufi Watababe.Waveform distortion and correction circuit for PWM inverters with switching lag-times[J].IEEE Transactions on Industry Applications,1987(5):881-886.
[2] Choi Jong-Woo,Sul Seung-Ki.A new compensation strategy reducing voltage/current distortion in PWM VSI systems operating with low output voltages[J].IEEE Transactions on Industry Applications,1995,31(5):1001-1008.
[3] 吴茂刚.矢量控制永磁同步电动机交流伺服系统的研究[D].杭州:浙江大学,2006.
[4] 王高林,于泳,杨荣峰,等.感应电机空间矢量PWM 控制逆变器死区效应补偿[J].中国电机工程学报,2008,28(4):79 -83.
[5] Urasaki N,Senjyu T,Uezato K,et al.A dead-time compensation strategy for permanent magnet synchronous motor drive suppressing current distortion[C].IEEE IECON'2003,(2):1255-1260.
[6] Lazhar Ben-Brahim.On the compensation of dead time and zero-current crossing for a PWM-inverter-controlled AC servo drive[J].IEEE Transactions on Industry Applications,2004,5(5):1113-1117.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
工程数学学报(2020年6期)2021-01-09
东南大学学报(自然科学版)(2020年1期)2020-01-16
通信电源技术(2018年3期)2018-06-26
摄影之友(影像视觉)(2017年10期)2017-11-07
科技创新与应用(2017年1期)2017-05-11
航空兵器(2016年5期)2016-12-10
光学精密工程(2016年4期)2016-11-07
现代防御技术(2016年1期)2016-06-01
