电动车用对转双转子电机驱动及防滑试验研究
2012-11-30 06:13周斯加龙江启张荫先
中国机械工程 2012年3期
周斯加 龙江启 储 军 张荫先
1. 温州大学,温州, 325035 2.深圳国家高技术产业创新中心,深圳,518000
0 引言
对转双转子电机是一种新型电动车驱动用电机。该电机所采用的驱动形式克服了传统电传动系统中,动力经主减速器、差速器、半轴,然后传到驱动车轮所造成的传输路径过长的问题,减少了传动引起的能量损失,同时它也可改善轮毂电动驱动[1]控制器多、成本高,以及较小的簧载质量引起的平顺性下降的不足,是一种结构简单、体积轻巧、控制简便,且集驱动、差速、制动能量再生、驱动防滑等功能于一体的电驱动形式[2-3]。
在双转子电机应用方面,日本横滨大学率先开展了双转子电机驱动特性等的基础性研究[4],但一些重要测试结果未见报道。目前,国内也逐步开展了这方面的研究。华南理工大学等对电机运行、控制等方面进行了理论方面的研究,探讨了双转子电机应用于电动车辆时的某些动力特性和控制策略[5-7]。为把双转子电机尽快地运用到电动车产品中,满足电动车对于电驱动系统更高的要求,本研究在之前理论分析的基础上搭建了双转子电机专用测试平台,启动了双转子电机的试验研究,为驱动系统装车奠定了基础。
1 双转子电机HIL仿真平台的搭建
1.1 硬件在环试验台构成
对转双转子电机硬件在环(HIL)试验台采用节能四象限电回馈封闭式试验台。试验台驱动由一台对转双转子电机及相应的减速装置完成,负载采用两台伺服系统及相应的扭矩、转速传感器组成,试验台的总体构成如图1、图2所示。其中,试验用双转子电机为具有能量再生回馈功能且控制精准的永磁同步双转子电机,考虑到成本等因素,电机采用风冷散热结构。双转子电机主要由内转子、外转子和机壳等组成[2]。

图1 双转子电机HIL测试平台结构图

图2 HIL双转子电机仿真平台
1.2 试验台仿真控制原理
由于试验台需要完成驱动防滑等精度高、响应迅速的试验项目,所以试验台控制和数据采集系统使用dSPACE多处理器模块化HIL实时仿真计算系统。在仿真试验时,扭矩仪将对转双转子电机两侧动态负载实时发送到dSPACE中,通过计算随即可得到模拟的两侧车轮实时滑转率情况[5-8]。数据记录、显示和对dSPACE的控制由计算机完成,控制参数的设定则在ControlDesk中进行。图3为HIL试验仿真流程图,图4所示为ControlDesk控制系统界面。

图3 HIL试验仿真流程图

图4 ControlDesk控制界面
如图3所示,HIL仿真试验可以构成一个闭环的双转子电机驱动防滑测试试验台,由驾驶员油门踏板(电位器)给定一个双转子电机驱动转矩要求,双转子电机控制器根据这个要求驱动双转子电机输出一定的转矩。通过调节驾驶员油门与负载电机转矩可以对双转子电机进行加减速控制。在驱动防滑仿真控制时,可以同时或者只调节单侧的负载电机以模拟路面的附着状态变化。轮速跟踪控制器按照文献[8]提出的控制原则根据两侧负载的转速变化率的和的变化情况计算一个修正转矩对双转子电机进行转矩抑制。在此模型中,从信号的采集到两侧负载转速变化率的计算以及到控制器计算负反馈转矩的大小都是在dSPACE中完成的。
2 试验结果与分析
本HIL仿真测试平台主要完成了两项测试任务:①双转子电机驱动特性验证;②基于轮速跟踪控制的双转子电机驱动防滑控制策略研究。
2.1 驱动特性验证
首先利用试验平台对双转子电机进行效率测试,考虑到试验平台设计要求,本次试验仅就双转子电机输出功率在10kW以内数据进行测试。试验结果如图5所示,对转双转子电机在低负荷区域效率偏低,在载荷逐步增大接近额定功率时,电机效率也逐步提高。当电机工作在8kW以上区间时,其效率超过80%。

图5 双转子电机效率曲线
其次,模拟双转子电驱动桥差速加速驱动试验,模拟步骤如下:将对转双转子电机加速至70%负荷附近并调节双转子电机两侧负载的平衡,在第10s时刻调整左右两侧负载使其不平衡,4s后对负载进行反向操作,使得左右侧负载值对换,再过4s后调整两侧负载使其同时恢复到初始值,负载变化如图6所示。近似正弦波地调节负载的目的是为了模拟电驱动桥在转向过程中两侧驱动轮受到的地面阻力的变化情况。图7所示为两侧转差率(即右侧转速与左侧转速之差与右侧转速的比值)变化曲线,可见转差率峰值达到了12.6%,并位于左右侧转矩值交叉点附近。

图6 电驱动桥左右侧负载变化

图7 转差率变化
双转子电驱动桥左右侧输出转速结果如图8所示,试验数据显示,在转动惯量差异率(两侧转动惯量差值与单侧转动惯量的比)小于5%的情况下,两侧转子的驱动差异性非常小。在整个试验阶段,左右侧转速输出能够较好地跟随控制指令,当有意调整两侧负载值并使其数值交替起伏时,双转子电机两侧输出相应地出现了转速差,且当负载数值恢复至初始值后,两侧输出的转矩恢复一致,转速差也随即消失。
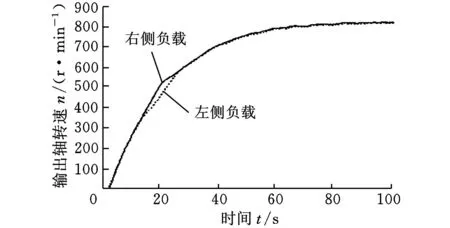
图8 两侧转速变化
2.2 驱动防滑控制策略验证研究
模拟电驱动桥轮速跟踪控制试验,试验过程为:给定双转子电机两侧等大的负载,启动电机加速,在加速至20s时刻电机两侧负载同时减小,在10s后又恢复到初始水平。dSPACE采集双转子电机两侧转速信号并进行微分计算,在选定的两种K值下输出修正电机控制信号,以抑制双转子电机转矩输出,其中K值的选择参见文献[8]。图9所示为电动驱动桥的负载给定情况,图10为电机给定的输出转矩和实际轮速跟踪控制修正后转矩比较图,图11为无转矩控制和有轮速跟踪控制下的输出转速比较图。

图9 电驱动桥负载给定

图10 电机输出转矩比较

图11 轮速跟踪控制转速比较
通过比较可以看出,采用轮速跟踪控制方式可以有效地抑制转速非正常快速增大,从而提高了车辆的驱动防滑能力。轮速跟踪控制方式不需要知道汽车和车轮的实际平移速度就可以对汽车进行驱动防滑控制,是一种非常适用于电动车辆的防滑控制策略。
3 结论
(1)设计的对转双转子电机具有和差速器同样的差速驱动功能。在等转矩控制下,双转子电机内外转子的转速此消彼长,且保持了两侧输出转矩的平衡,其差速作用与传统的车用开式差速器相同。
(2)通过调整负载电机转矩来模拟道路附着状况的改变,设计了通过骤减负载模拟车辆驶经低附着系数路面的打滑试验,所设计的轮速跟踪控制器有效降低了双转子电机转矩的输出,在一定程度上抑制了滑转率的突然升高,控制效果明显。
[1] Malan J, Kamper M J. Performance of a Hybrid Electric Vehicle Using Reluctane Synchronous Machine Technology[J]. IRRR Transactions on Industry Applications, 2001,37(5):1319-1324.
[2] 周斯加,罗玉涛,黄向东.双转子电机混合动力汽车驱动特性研究[J].中国机械工程,2008,19(16):2011-2015.
[3] 罗玉涛,黄向东,周斯加,等.一种油一电混合动力汽车的多桥驱动系统:中国,20061003386.5[P].2006-02-27.
[4] Kawamura A,Yokoyama T,Kume T. Anti-directional-twin-rotary Motor Drive for Electric Vehicles[C]//Conference Record of the 1994 IEEE Industry Applications Society Annual Meeting.New York,1994:453-459.
[5] 周斯加,罗玉涛,黄向东,等. 4WD电动车的滑转率识别及防滑控制[J].华南理工大学学报(自然科学版),2008,36(6):95-100.
[6] 罗玉涛,张桂连,旷鹏,等.四轮驱动汽车操纵稳定性级联式控制策略的研究[J].汽车工程,2009(31):807-811.
[7] 罗玉涛,谭迪,刘延伟,等. 基于轴间驱动力分配的汽车操纵稳定性控制[J].华南理工大学学报(自然科学版),2009,37(7):74-78.
[8] 邓志君.基于对转双转子电机的电动汽车研究[D].广州:华南理工大学,2007.
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
汽车安全与节能学报(2022年2期)2022-07-17
电机与控制学报(2022年6期)2022-07-15
汽车实用技术(2022年10期)2022-06-09
防爆电机(2022年2期)2022-04-26
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
装备制造技术(2020年11期)2021-01-26
汽车实用技术(2020年24期)2021-01-05
制造技术与机床(2019年6期)2019-06-25