
一种基于磁阻传感器的实时方向随动系统
2012-12-01 10:07赖于树向利平
自动化仪表 2012年1期
赖于树 郭 鑫 向利平 余 波
(重庆三峡学院物理与电子工程学院,重庆 万州 404000)
0 引言
实时方向随动控制系统在汽车灯光方向控制、智能轮椅和雷达天线等领域有着广泛的应用。目前,基于磁阻传感器,利用地磁场探测技术测量方向角已有成熟的解决方案[1]。本文将地磁探测技术与加速度测量技术相结合,提出了一种实时方向随动系统。该系统可应用于地质监测、车载雷达、机器人以及实验仪器等医疗器械等领域的实时方向控制。测量分析表明,该系统可以较好地实现移动载体的实时方向随动控制。
1 实时方向随动原理
1.1 磁阻传感器测量原理
基于某些金属的各向异性磁电阻效应,设计了磁阻传感器。各向异性磁电阻效应是指对于强磁性金属(铁、钴、镍等及其合金),当外加磁场平行于磁场内部磁化方向时,阻值不变;若外界磁场方向偏离时,则其阻值减小。如果把这类金属做成薄膜带状导线,当电流通过时,其阻值大小随内外两磁场的合成磁化方向与电流流向的相对关系发生变化,趋于同向时阻值增大,背向时则阻值减小[2-5]。
地球磁场的强度大约为0.05~0.06 mT,现有的磁阻传感器可以很好地测量地磁场范围内的磁场强度。但在实际应用中,磁阻传感器一般不在水平面上工作。磁传感器姿态图如图1所示。

图1 磁传感器姿态图Fig.1 Attitude diagram of the magnetoresistive sensor
当磁阻传感器偏离水平面一定角度时,就会产生较大的倾角误差。为了确定此时的方向偏角,就需要测量地磁场在空间三个轴上的分量磁场大小HX、HY、HZ,并采用加速度传感器测量俯仰角φ和横滚角θ,以补偿倾角误差。
在测得 HX、HY、HZ、φ、θ后,将这些数据代入式(1)与式(2),可得到磁场强度在水平面上的分量HX、HY。

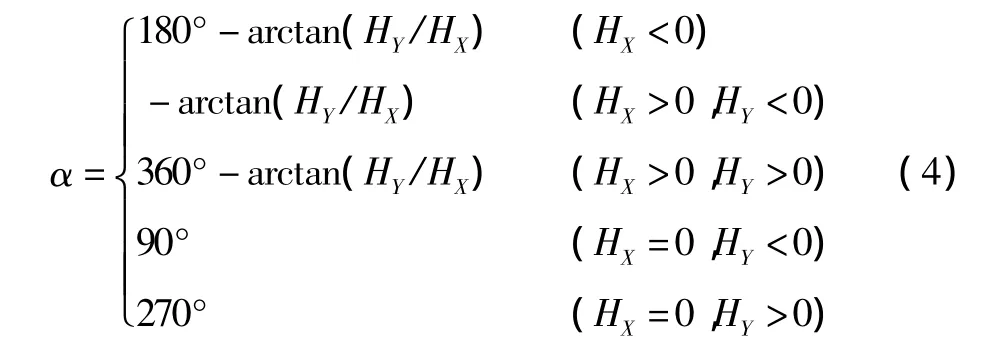
磁阻传感器方向和地磁北极之间的夹角为α,其表达式为:

考虑到正切函数的周期为180°,为了保证数据的有效性,可将方向角α按条件分段表示,由式(4)即可转换得到 0°~360°范围内的方向角[6-8]。
1.2 实时方向随动原理
基于磁阻传感器的实时方向随动技术是通过磁阻传感器和加速度传感器相结合来测量移动载体方向角,并可根据设定方向或跟踪方向随时调整载体的运动方向。磁阻传感器体积小、功耗低、易于安装,且温度特性好、实时性和抗干扰能力强,误差不随时间积累。因此,在实时方向随动系统中采用磁阻传感器具有明显的优势。
本文提出的实时方向随动系统采用两个三轴磁阻传感器模块与一个加速度传感器模块相结合,在测量时采用角度差值法。该方法能抵消随着测量角的增大而带来的误差。测量时,首先由加速度传感器测得俯仰角φ和横滚角θ,由磁阻传感器A和B各自测得三个轴上的分量磁场HX、HY、HZ;然后根据测量与计算原理,分别求出磁阻传感器A和B水平面的方向角αA和αB(αA和αB分别为磁阻传感器A、B与地磁北之间的夹角)。
对回归方程偏导求解,可得出香辣藕片的最佳工艺条件:硬化温度为31.23 ℃,浸泡时间为2.16 h,硬化剂浓度为1.15%。根据实际操作情况修正为:硬化温度31 ℃,硬化剂浓度1.1%,浸泡时间2 h,符合国家标准[24]。在此条件下进行3次验证实验,得到香辣藕片的硬度为701.36,与预测值707.78基本一致,相对误差为0.91%,而感官评分此时达到92.60分。综上,说明所得模型与实际情况拟合程度较好,能够反映硬化温度、浸泡时间和产品硬度以及感官评分之间的关系,可采用该模型对香辣藕片的品质进行预测。
系统测量方法示意图如图2所示。需要识别或跟踪的方向角α可通过两个磁阻传感器的方向角相减得到,即 α=αB-αA。

图2 系统测量方法示意图Fig.2 Measuring method of the system
2 实时方向随动系统的实现
2.1 硬件结构
实时方向随动系统框图如图3所示。

图3 实时方向随动系统框图Fig.3 Block diagram of the real-time direction servo system
系统主要由加速度传感器模块、磁阻传感器模块、微处理器模块(CPU)和液晶显示模块组成。系统以微处理器模块为核心,将来自磁阻传感器模块和加速度传感器模块的数据信号进行各种分析处理,并计算出所需识别的方向角值。磁阻传感器模块将采集的地磁场信号转换为电信号,同时对微弱的电磁信号进行放大滤波和模数转换,最后以数字信号输入到CPU。加速度传感器模块测量俯仰角φ和横滚角θ,以补偿倾角误差。液晶显示模块起到显示作用,可直观地显示出方向差角α及各种参数与信息。
此外,在主控芯片的选择方面,需要考虑数据采集及A/D转换任务重等因素,选用集成多个定时器单元和A/D单元的芯片,并满足低功耗设计需求。在供电系统的设计方面,需要考虑电磁干扰等问题,即通过合理布局与优化设计,减小电源对测量系统带来的干扰。
2.2 软件设计
数据处理算法是提高系统测量精度、确保实时性的关键。本系统的软件部分采用模块化设计,并采用“标志法”来避免程序跑飞,即在执行某一模块时,为即将进入的下一模块设置一个标志码。系统进入该模块后再检查这一标志码。系统如正常则执行,反之则进入错误处理程序。
程序总体结构分为系统主程序和各功能模块子程序两部分。其中主程序负责有效地管理系统的软硬件资源,完成对子程序的及时响应和调用。主程序流程如图4所示。
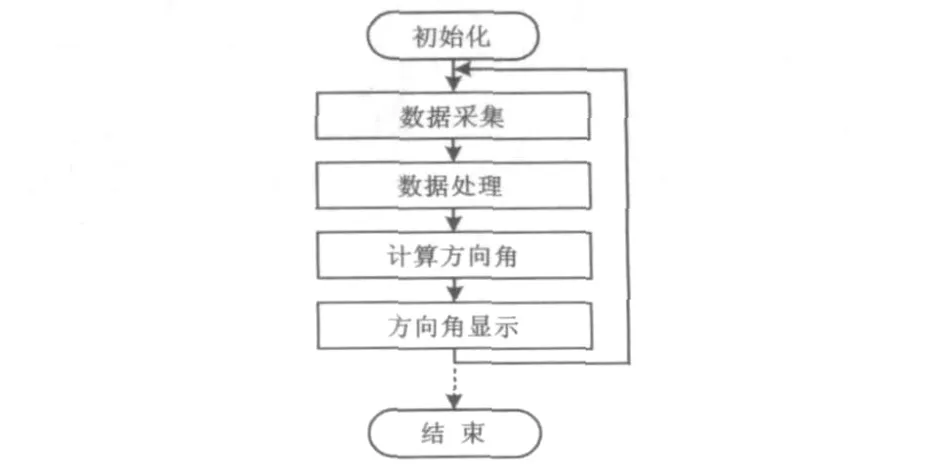
图4 主程序流程图Fig.4 Main flowchart of process
在具体算法设计过程中,需要重点考虑系统的实时性、干扰性、同步性、低功耗和信号抖动性等问题。程序首先完成初始化任务,主要包括系统存储器的选择、时钟的选择、管脚的分配、中断优先级、SPI同步串口初始化、中断模式、A/D的配置、定时器时钟和工作方式的选定等。由于磁阻传感器输出的信号抖动较大,为提高系统的抗干扰性,获得较为稳定可靠的数据,在数据处理算法上采用了多点采集求平均法,并运用数据结构中的循环链表。
3 应用实例
3.1 传感器的选择
系统采用HMC5883三轴磁阻传感器来测量空间三个正交方向(HX、HY、HZ)的磁场强度大小,磁场测量范围为10-6~0.6 mT。以此为核心组成的磁阻传感器模块自带有放大器、驱动器、偏置消除单元、12 bit ADC转换器和1个I2C系列总线接口。
加速度传感器选用ST公司的LIS3LV02DQ微加速度传感器。该传感器带宽可调,具有方向检测功能,12 bit/16 bit ADC转换器以及SPI/I2C标准数字接口。该传感器是一个量程为±2 g或±6 g的三轴低电压线性加速度传感器,由它组成的传感器模块具有尺寸小、功耗小以及噪声低等特点。
3.2 微处理器部分
系统选择DSP TMS320F2812作为核心控制芯片。该芯片是一款高性能的数字信号处理器,它具有较高的频率和丰富的外围接口,尤其适用于电机系统控制。TMS320F2812主频可达150 MHz,具有低功耗特性(核电压为1.8 V、I/O 电压为3.3 V);具有128 kB ×16位片上Flash、18 kB×16位片上 SRAM、4 kB×16位片上ROM。在用于电机控制的外设方面,配置有2个事件管理器、多种标准串口外设、1个SPI同步串口、2个UART异步串口、1个增强型 CAN总线接口、1个McBSP同步串口;16通道的12位A/D转换器;56个独立可编程、复用型、通用I/O口。在实际应用中,由于TMS320F2812没有I2C接口,所以与磁阻传感器和加速度模块接口采用的是模拟I2C的形式。
3.3 方向控制系统设计
依照实时方向随动系统的测量原理,将磁阻传感器A安装在轮椅底座上,这时我们认为磁阻传感器A是水平放置的。磁阻传感器B和加速度传感器相对固定后,被安装在轮椅乘坐者所戴的头盔上,以测量人脸偏转角度。如果磁阻传感器A的方向始终都是轮椅正前方,则它在水平面上是变化的。当磁阻传感器B与轮椅正前方成30°时,轮椅需要移动30°,基准方向就是此时的轮椅正前角度。
本系统软件是在DSP集成开发环境CCS3.3上开发的。该集成开发环境集程序的编辑、编译、链接、调试以及仿真等功能于一体,具有友好的交互界面,使得用户的编程、调试工作更加方便且高效。实时方向随动过程是一个闭环过程,并按一定流程加以实现。智能轮椅的方向随动程序流程如图5所示。

图5 方向随动程序流程图Fig.5 Flowchart of the dynamic direction program
通过该程序,计算人头部的磁阻传感器和轮椅上的磁阻传感器之间的水平角度差,即轮椅转向角,从而产生不同的PWM控制信号,以驱动电机运转,进而驱动轮椅转向。精度控制采用了闭环PID控制系统,闭环系统中采用霍尔开关,采集电机的转速并反馈回DSP芯片。
电机的控制采用了两路电机双PWM控制。电机的驱动芯片为L298芯片。L298内部集成了桥式驱动电路,桥电压可达48 V。本系统采用了24 V供电。采用两路电机双PWM控制的优点在于可以使轮椅的运动更加灵活。
3.4 测试数据及其误差分析
在测试分析数据时,以室外环境为测量环境,选择多个不同的地点进行测试。方向精度的测量在0°~360°之间进行。测量时,两组测量数据之间的系统响应时间在1 s以内,将其期望方向角差值(轮椅转动的实际方向角)与实际测量方向角差值(α=αB-αA)一并列表记录,并加以比较分析。
实测数据如表1所示。
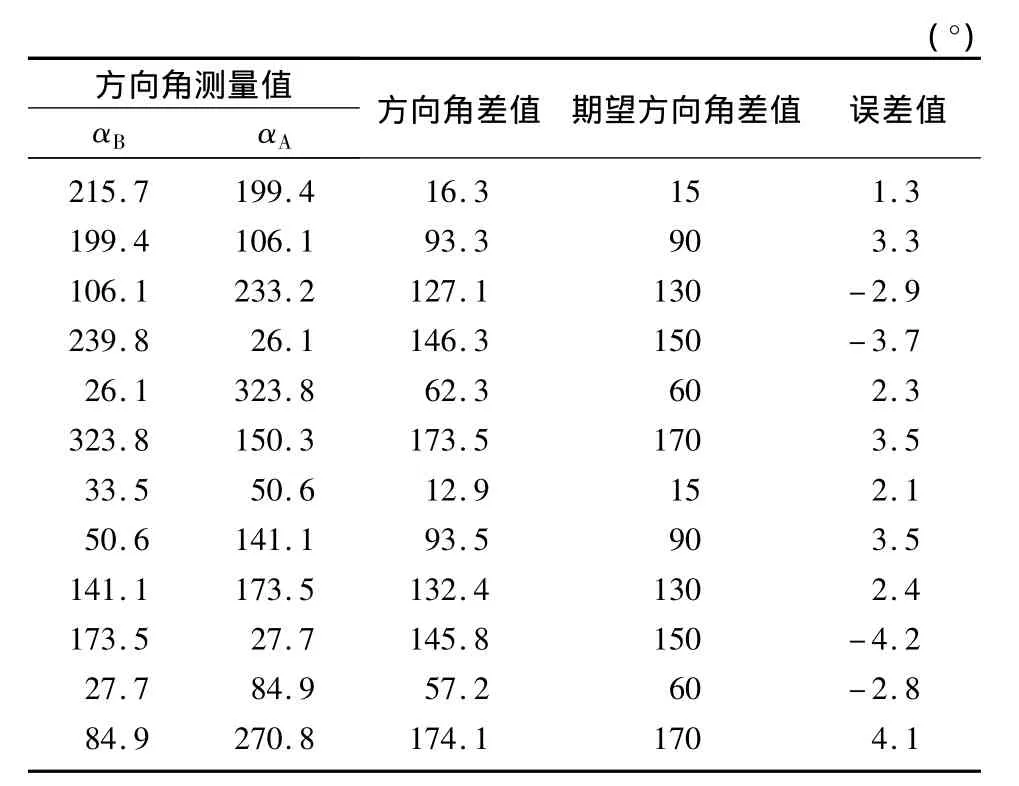
表1 实测数据表Tab.1 The practical measured data
从表1可以看出,即使在短时大转向的情况下,转向控制误差也没有超过±5°。由表1测得的数据可以计算出转向控制误差的平均值为3.0°,无论是最大误差还是平均误差均能够满足智能轮椅方向控制的工作精度要求。实时方向的测量数据受到诸多因素的影响,试验数据难免存在系统误差。试验中系统误差的来源主要有以下两个方面。
①传感器本身误差:磁阻传感器三轴的灵敏度不一致引起的灵敏度误差、三轴磁阻传感器在制造时不能保证正交而产生的正交误差、传感器的零点不为零时所引起的零位误差。
②测量环境误差:测量环境误差是磁阻传感器受周围的铁磁材料影响引起的误差,这个误差是比较明显的,也是不容易消除的。铁磁材料的影响分为硬铁影响和软铁影响两类。硬铁影响源于永久磁铁和磁化的钢铁对磁场引起的变化,如电动机、电源、手机等,这种影响对磁场分量来说是恒定的。软铁影响产生于地磁场,这类影响往往都比较微弱[9]。
4 结束语
本文设计的磁阻传感器实时方向随动系统具有体积小、成本低、抗干扰能力强、可靠性高以及易于安装到移动载体上等特点。通过分析智能轮椅上的应用实例可知,本系统能够满足对运动载体进行实时方向识别的要求,适合应用于车载设备、机器人、医疗器械中的方向控制等领域。在实际应用中,测量数据的分析处理十分关键,一个好的数据处理算法可达到事半功倍的效果。此外,将本方向随动系统与其他方向识别系统相结合,形成冗余性互补,可构建更可靠、性能更稳定的实时方向随动系统。
[1]王君,罗冰.基于磁阻传感器的带倾斜补偿的电子罗盘的研制[J].河南大学学报:自然科学版,2009,39(3):244 -245.
[2]侯宏录,王赛,张雄星,等.基于磁阻传感器的弹体姿态测量系统[J].兵工自动化,2010,29(3):75 -76.
[3]鲍松堂.磁阻传感器及其在飞行体姿态测试中的应用[J].五邑大学学报:自然科学版,2010,24(2):52 -54.
[4]潘霓,骆乐,闻育.基于磁阻传感器的车辆检测算法综述[J].计算机工程与应用,2009,45(19):245 -246.
[5]孙宁.利用磁阻传感器测量飞行体滚转角[D].南京:南京理工大学,2008.
[6]蒋学斌.基于 DSP的磁阻传感器导航仪设计[J].测控技术,2010,29(7):9 -11.
[7]赵灿先,陈云飞,杨决宽,等.基于加速度传感器和磁阻传感器的空间三维角测量仪的设计设[J].智能控制技术,2007,36(23):71-72.
[8]郭家玉,倪化生,孔德义,等.3-D磁传感器的电路设计与信号处理[J].自动化与仪表,2008,44(12):5 -8.
[9]吴疆,孙凌玉.车用磁阻传感器式电子罗盘系统的开发[J].自动控制与测试测量,2006(2):98-99.
猜你喜欢
大电机技术(2022年5期)2022-11-17
当代水产(2022年6期)2022-06-29
防爆电机(2021年4期)2021-07-28
数学小灵通·3-4年级(2020年3期)2020-06-24
新世纪智能(高一语文)(2019年10期)2020-01-13
时代人物(2019年29期)2019-11-25
汽车观察(2018年12期)2018-12-26
电子制作(2018年19期)2018-11-14
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
