美国海军多传感损管探测技术研究综述
2013-01-11 06:10,,,
船海工程 2013年4期
,,,
(1.上海船舶电子研究所,上海 201108;2.海军驻锦州地区军事代表室,辽宁 锦州 121000;3.海军驻426厂军事代表室,辽宁 大连 116005)
美国海军多年致力于开发舰艇环境下的实时远程探测系统,并称之为立体传感探测系统(volume sensor,VS),其目的是集合多种传感、探测手段,对火灾的各种特征(如烟、温、光、气体、声、图像等信息)进行有机融合,研究适合舰艇的智能化探测算法,建立多判据、多数据融合的损管探测原理样机,提高探测灵敏度,减少探测时间和误报率。
这种基于多传感器、数据融合的探测系统研究经历了两大发展阶段。第一阶段,美海军损管系统减员自动化项目开发了基于多传感器多判据的早期火灾探测系统(EWFD),并对其探测灵敏度和抗误报性能进行了试验评估。
然而由于EWFD多传感器探测采用气体探测、烟雾探测等依赖火灾蔓延的探测手段,造成响应瓶颈。在第二阶段新型损管探测技术研究中,美海军寻求了多种非接触型探测技术,并应用第一阶段已验证有效的多传感多数据融合技术,发展了一种以视频火灾探测为主、光谱和声学探测为辅的损管探测技术,通过大量试验逐步完善,经实船对比试验,验证了这种新型探测方式的卓越性能。
1 早期火灾探测报警技术
1.1 技术途径
美海军研究办公室(Office of Naval Research, ONR)投资的一项科研项目“损管系统——减员自动化”(DC-ARM,Damage Control Automation for Reduced Manning),目的是减少舰员,提高损害管制系统的自动化程度和智能水平。
1998年,美海军研究试验室(NRL)开始寻求适用于舰艇火灾探测的多传感器和报警算法。虽然,多传感器多判据探测技术当时已普遍取得进展,但是很少有研究证明这种新型多判据探测方式相对于门限感烟探测报警器的性能有所改善,大多研究都没有评估这种技术在抗误报方面的性能,对探测灵敏度的改善性能评估试验也仅局限于标准火灾场景(如EN54规定的火源条件),美海军投资DC-ARM研究项目旨在评估多传感多判据探测系统在船用条件下的性能。
在DC-ARM项目中,采用真实火源(88种)与干扰源(38种),通过全尺寸试验,对20种传感器(CO、CO2等)进行参数测量,形成实验室环境火灾与非火灾(干扰源)数据库[1]。采用模式识别方法对真实火源和干扰源进行分类识别,通过对传感器数据的模式分析并进行特征提取,确定几种传感器(特征数据)组合作为火灾判别依据,火灾报警识别采用概率神经网络算法(PNN)。
采用上述多传感器和火灾报警算法,在全尺寸实验室环境下,其性能与商用烟雾探测器进行比对测试,新系统在火灾识别能力和误警率方面有显著改善。在ex-USS SHADWELL船上进行了实船试验,进一步研究探测算法,并丰富了火灾及干扰源数据库。
1.2 原理样机试验
利用上述实验室和实船试验数据集合,筛选出几组传感器作为多传感器探测系统的研究基础。这种多传感器探测原理样机,也称早期火灾探测系统(EWFD),先后进行了4个系列的全尺寸实船试验。
1.2.1 系列试验1
2000年2月7日至18日测试了两种EWFD原理样机的实时响应,与商业感烟探测器进行性能对比[2]。传感器阵列成功与实时的数据采集系统集成,数采系统运用概率神经网络提供实时报警。
1.2.2 系列试验2
2000年4月25日至5月5日[3]是系列试验1工作的延续,重点在于通过更多的实船数据优化原理样机算法,在不同的环境条件下测试了各传感器阵列对于更多火源和干扰源的响应性能[3]。共进行49个试验,包括9种明火源、20种阴燃火源、20种干扰源,为优化PNN算法丰富了数据库,同时成功实现了监控系统通过TCP/IP实时采集处理探测器数据。
1.2.3 系列试验3
2000年7月20日至28日根据系列试验1和2结果确定最优传感器阵列和算法,并测试其性能[4]。
共进行了39次实验。增加了3种新的场景,每个传感器阵列包含6个传感器,见图1。
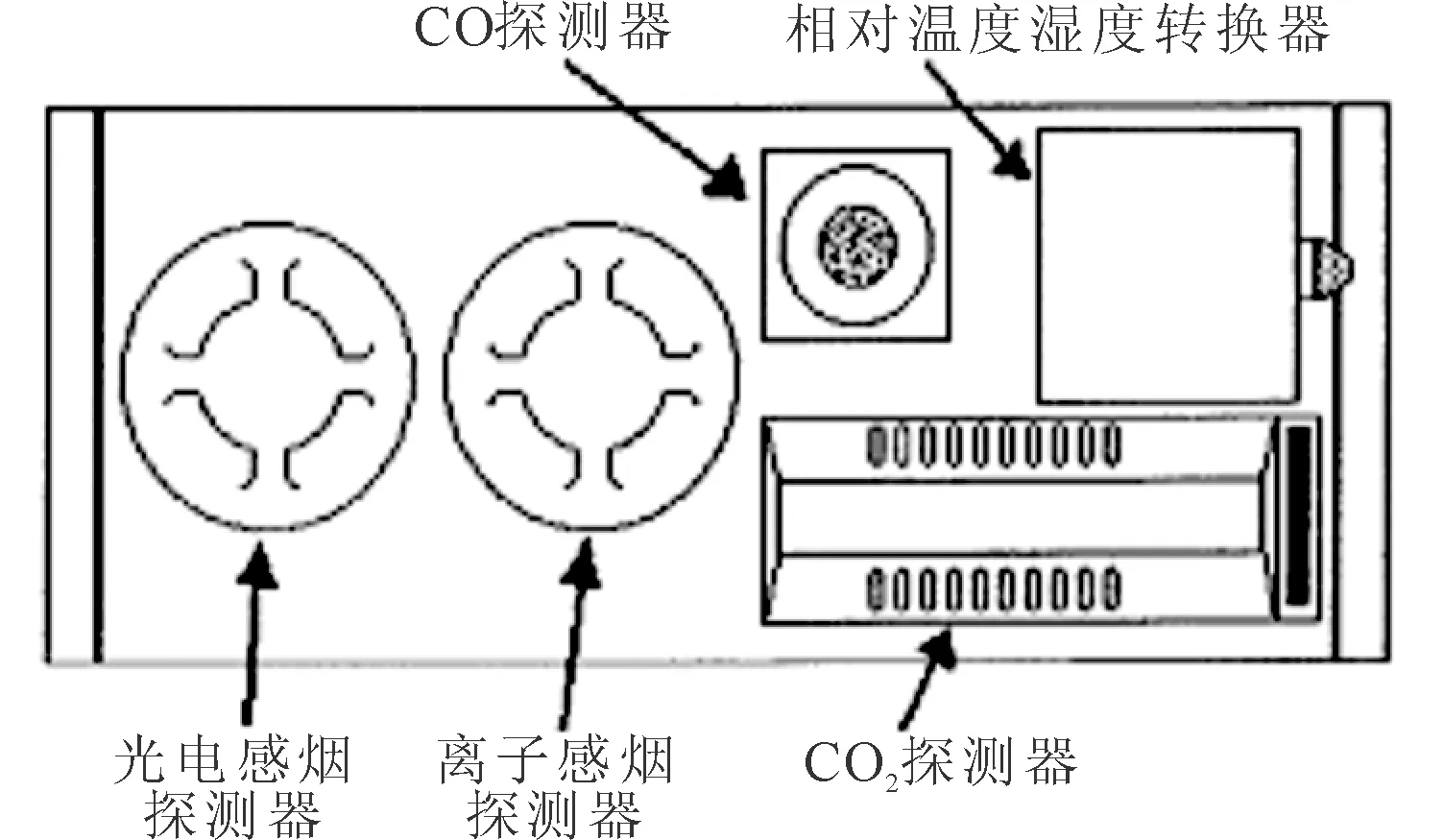
图1 EWFD传感器阵列
其中CO、CO2、光电、离子传感器被用于实时报警算法,其他传感器用于试验后数据处理评估各种可能组合。System Sensor的6个离子探测器和6个光电探测器被装于6个原理样机。基于UL268烟雾箱数据的经验关系将传感器输出信号转换成相应的测量数据。如将离子探测器输出d MIC(10-12A)值转换成遮光率数据。
船上商用探测系统选用Simplex和System Sensor的光电和离子感烟探测器用来与EWFD做对比试验。
原理样机性能结果表明:响应速度方面的数据还不能证明运用多传感器多判据报警算法的EWFD原理样机比Simplex系统感烟探测器性能更好;EWFD在两个位置上的探测性能比其它探测器更好;所有EWFD比商业探测器能探知更多的火源;EWFD探测阴燃火源比离子感烟探测器性能更好;6个EWFD原理样机除了一个例外,其余均比单独的System Sensor探测器性能更强;采用多判据算法EWFD对于初期火灾探测具有更高的灵敏度。总之,采用PNN算法的多传感器、多判据实现方法在火灾探测应用领域具有应用前景。
1.2.4 系列试验4
2001年2月26日至3月9日,研究工作旨在进一步优化、完善报警算法[5]。将14台EWFD原理样机分别布置在实船14个部位,进行系统性能测试。试验场景包括19个明火源、11个阴燃火源和22个干扰源。EWFD与商业探测器进行基于正确探测能力和系统响应时间的性能对比,商业探测器选用Simplex和System Sensor的光电和离子感烟探测器。结果表明(见图2、3):优化后的PNN报警算法性能优于前期算法;总体上EWFD系统性能等同或优于商业探测器,仅有一个例外,即System Sensor光电探测器抗干扰能力更强;EWFD系统较离子、光电探测系统能更好地探测明火、阴燃火源;EWFD抗干扰能力等同于System Sensor,但不如光电探测器。早期火灾探测报警系统(EWFD)被证实:在抗干扰、响应时间等综合性能方面优于商用烟雾探测器。

图2 EWFD系列试验4性能对比试验数据统计(正确率)

图3 EWFD系列试验4性能对比试验数据统计(响应时间)
综上,EWFD早期火灾探测系统采用多传感器阵列设计,并通过实验室和实船数据用于训练算法,性能测试试验采用了多种代表性的火灾场景和可能的干扰源,试验表明其综合性能(早期报警和抗误报警方面)优于传统接触式探测器。
2 立体损管探测技术
EWFD系统仍属接触型点式探测,探测方式依赖于火灾烟气羽流扩散至传感器,对于阴燃火,烟雾颗粒和火灾产物蔓延缓慢,导致报警时间延迟;同时,一些会产生类似火灾产物的干扰源(如焊接、切割等),EWFD难以可靠区分干扰源和真实火。因此,美海军从FY01(美2001财政年)开始寻求一种不依赖火灾烟气羽流自然扩散、能够监视整个空间、且具有较强抗误报能力的新型探测技术。
2.1 技术途径
美海军项目新型损管(advanced damage countermeasures)的任务之一便是面向上述研究目标,开发新型立体探测传感器(advanced volume sensor)。FY01阶段开展的工作主要是调研文献资料、技术现状及发展趋势,并确定了几项技术用于研制立体传感器。
面对两种技术途径:一是在防护空间内布置大量传感器或点式探测器并进行组网,另一种是通过光学、声学等新技术手段。前者存在费用昂贵及维护困难等问题,该项目选择了后者,通过光学探测手段,远程监视船体空间的火灾及其他事件。采用中红外摄像机可以获取光谱信息和空间信息,能可靠识别明火或烟气,但造价昂贵。最终,采取视频图像火灾识别(机器视觉手段)和光谱火灾探测两种途径,同时对声学探测方法[6]也进行探究。
2.2 视频图像探测技术
FY02阶段开展了视频图像探测技术(video image detection,VID)研究,在Hughes公司位于Baltimore的试验室模拟DDG51级船用环境进行了火灾识别试验工作。评估了商用视频图像探测技术(VID)的海军应用前景,得出结论:VID系统采用烟雾报警算法,其火灾探测性能等同或优于点式感烟探测器;对于小型明火,离子感烟探测器响应较好;对于较远距离的阴燃火,VID较离子和光电感烟探测器响应更快[7]。
FY03阶段开展了系列试验研究。首次试验是在CVN21“火灾对武器危害项目”的系列试验2中进行。试验评估了VID对于两种典型火灾场景(船舱库房内木垛火和库房邻近舱室木垛火)的探测性能。
由于此次试验场景有限,NRL针对Volume Sensor项目在ex-USS Shadwell开展了名为VS1的系列试验(2003年4月20日至25日),试验结果表明:VID的性能与摄像头设置的关系有待进一步研究;光学、声学探测手段对于火源和干扰源识别具有一定的优越性。在Navy Wet Trainer进行了追加试验,广泛收集了管道破损和透水事件的声信号和视频信息,为进一步改善算法以及将视频图像、光谱和声信号应用于海军损管领域奠定了基础。
VS2系列试验[8](2003年8月至04年2月)一方面在ex-USS SHADWELL试验船上,通过多个全尺寸试验项目,在各类明火、阴燃火、干扰源场景下,评估了3种商用视频图像火灾探测系统(瑞士Fastcom公司的SFA产品、美国Fike公司的SigniFire产品、美国Fire Sentry公司VSD-8产品)。为全面测试VID系统的灵敏度和局限性,进行了280个全尺寸试验,涉及各类舱室和通道,同时考虑了各种背景、光线和摄像机设置等因素。
VID系统的响应与标准(离子、光电感烟探测器)火灾报警系统(Notifier、EST产品)作出对比,结果显示:对于明火,EST离子探测器响应最快早于VID系统1.7 min;对于阴燃火,VID系统较点式探测器响应快约4.0~7.5 min。
2.3 光谱探测技术
在2003年CVN21“火灾对武器危害项目”的系列试验2中,评估VID技术的同时也评估了基于光谱探测立体传感(SBVS)组件的探测性能[9-10]。SBVS的目的是利用可见光以外电磁波的光学手段研究探知火灾、烟雾和其他灾害的方法。SBVS组件中的传感器试图用来结合并增强Volume Sensor中的核心VID技术。VID系统通常辨识烟雾比辨识火焰的能力更强,而SBVS组件的主要目的是更好的探测明火。
VS2系列试验在Hughes公司位于Baltimore的工厂同步开展了基于光谱的火灾探测(SBVS)试验研究工作,共进行253次试验,试验对象包括NRL的长波视频探测LWVD、光学测试平台,采集了大量数据,以确定各类火源和干扰源的光学信号[11]。
其中,光学测试平台由火焰辐射尖峰相关的几个从红外到紫外的窄波工作的单元光学探测器组成。单元光学探测器一方面来源于商业OFD光学火焰探测器(含有一个或多个单元光学传感器),对这些商业探测器进行了改装,即:除报警性能外,增加了传感器原始数据输出功能,从而可评估每种光学传感单元在整个系统中的独自性能,进而决定是否选取某个单元用以改善组件性能。另一方面,SBVS测试平台装有NRL封装的窄波段传感器,可以响应火焰辐射的原子或分子辐射,这涵盖了很宽的光谱范围,包括红外、可见光和紫外。部分传感器用于与单个商业OFD探测器进行对比,并作为获取OFD原始数据的另一途径;另一些传感器用来探测非商业火焰探测器的探测波段。
2.4 原理样机试验
FY04阶段,美海军立体探测传感器项目(Volume Sensor)进行了数据分析,采用模式识别和基于特征的时域分析技术;设计并实现了硬件系统和实时算法。
首个集成多个传感器、采用融合机(Fusion Machines)的立体传感器(VS)原理样机于2004年7月在ex-USS Shadwell进行评估(VS3系列试验)。尽管Volume Sensor原理样机系统整体上是成功的,但是VS3系列试验也揭示了VID单元达不到所期望的性能,强调了持续改进算法的必要。
在上述基础上,VS4系列试验(2004年)在部件和系统融合层面做了改进,实验空间从VS3的1个空间扩展到了6个空间场所(包括电子舱、弹药舱、操控室、过道、外围垂直发射部位等),丰富了场景和传感器测量数据库。将多个VS部件进行集成,见图4、5。各部件探知外部事件并将报警信号和报警时间传送至融合机。这种改进取得成功,大大改善了VS性能,增强其抗误报性能和探测管道破损、透水事件的能力。

图4 VS4中的立体传感器各部件
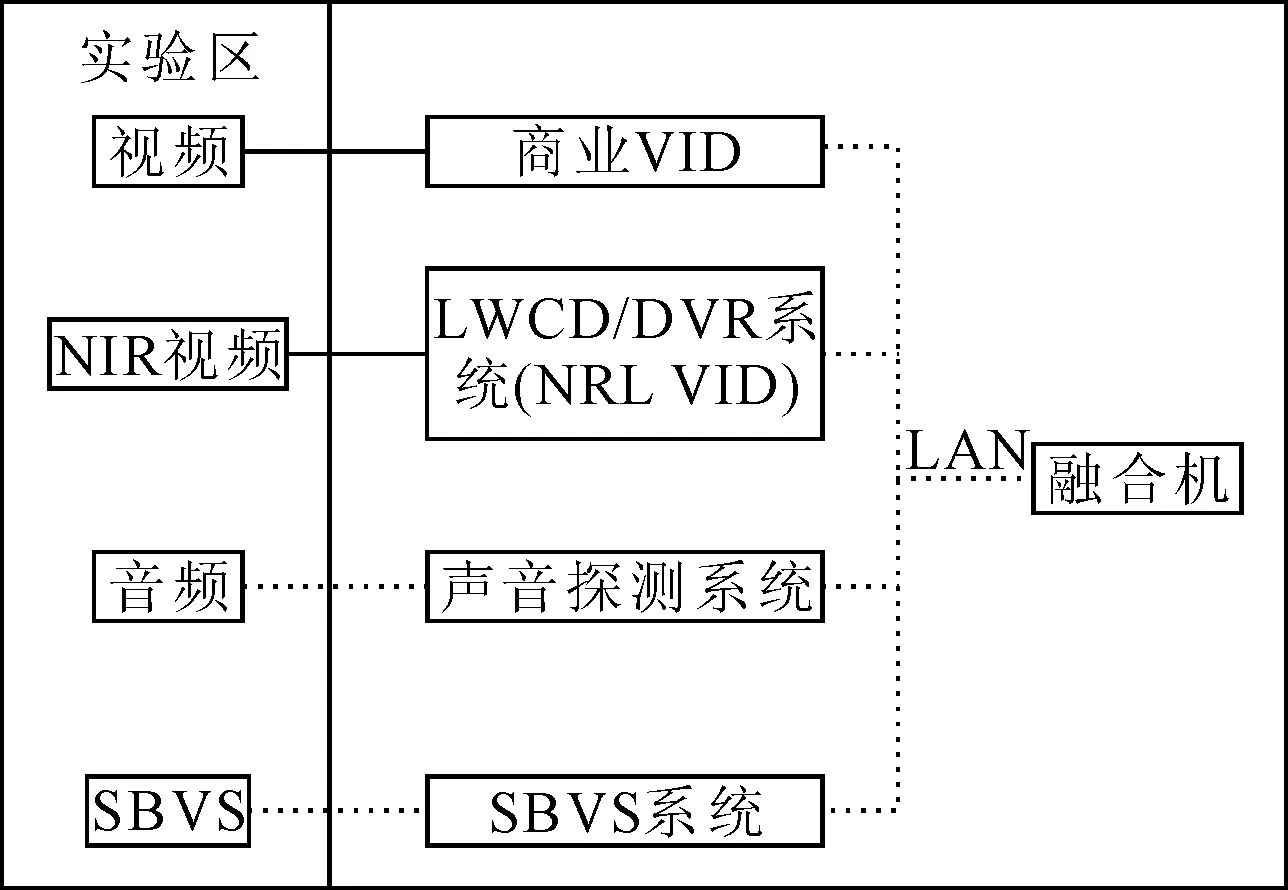
图5 VS4立体传感器原理样机系统框图
VS原理样机与商业火灾探测系统的报警正确率统计见表1[12]。
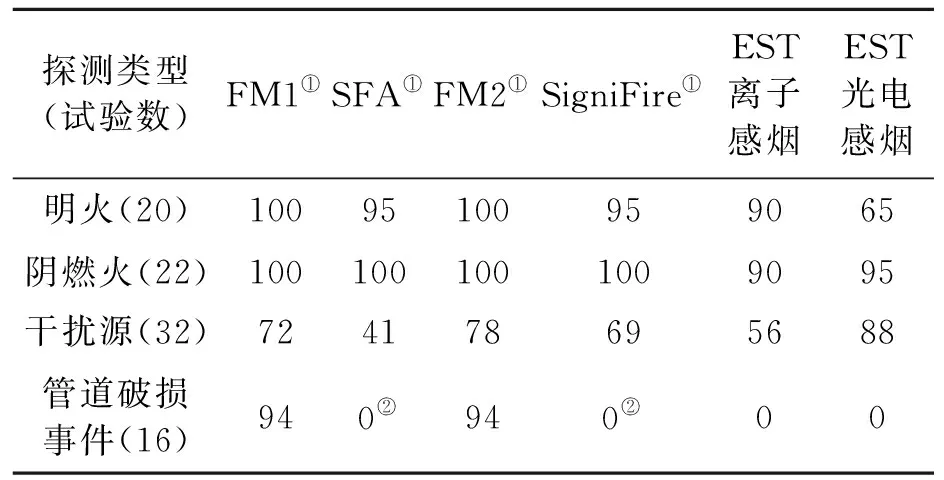
表1 VS4中FM1、FM2与商业火灾探测系统的事件探测正确率统计表 %
注:①FM1、FM2为采用两种融合机的VS原理样机;SFA:是瑞士Fastcom公司VID产品;SigniFire是美国Fike公司VID产品。②SFA能探测到75%的管道破损事件,SigniFire能探测到13%的管道破损事件,但是VID系统都不包含管道破损算法,将这类事件识别为烟雾,或偶尔识别为火焰,故表中管道破损事件中不考虑VID系统的正确识别率。
VS4系列试验结果表明:
1)离子、光电探测器识别虚警的概率分别为56%、88%,而两种VS样机的相应概率分别为72%、78%;
2)离子、光电探测器明火报警率为90%、65%,阴燃火报警率为90%、95%;
3)两种VS原型的明火和阴燃火报警率均为100%;
4)包含管道破损算法的VS样机几乎无虚警发生;
5)两种VID系统也取得了更好的烟雾探测灵敏度,并被用来优化VS样机的火灾和烟雾探测性能。
可见,VS原理样机能够探测出所有明火、阴燃火源,并能正确分辩全部明火、阴燃火源,采用两种融合机的VS原理样机FM1和FM2分别以72%和78%的准确率判别干扰源。与两种商业VID系统、点式离子感烟探测器比较,VS原理样机火灾探测更可靠,抗干扰能力更强。EST光电探测抗干扰能力最强,但火灾探测性能有限。
VS原理样机是惟一能够正确、可靠探测管道破损事件的探测器,而VID系统由于不包括管路破损算法探测,视频图像中水从管路留出的图像常常被误判为阴燃火源的烟雾扩散。光电离子探测系统无此报警能力。
FY05阶段,VS5系列试验于2005年在ex-USS Shadwell船试验舱进行,对两种立体传感器原理样机(VSP)(两种VSP中的VID部件分别采用瑞士Fastcom公司SFA产品和美国Fike公司Signifire产品)与上述两种VID、三类EST点式探测器进行性能对比。VSP能够探测识别多种损管和干扰事件,并能实时传送至监控系统[13]。此前,VSP试验局限在一个舱室条件下研究、改善、证实VS组件和融合机(FM)算法,系列试验VS5对VSP在多各舱室、多种事件源下进行评估。VSP传感器组件安装在6个船舱内,有可能同时面临多种事件源的情况下进行测试。VSP系统同时成功与DD(X)自动火灾灭火控制系统(AFSS)实现对接。
VSP样机由几种商用硬件组件集成,结合了智能软件和NRL研制的智能数据融合算法。如图6,VSP包含一个视频摄像机、一个长波(近红外)摄像机、两个光谱传感器(UV和IR)以及1个麦克风。
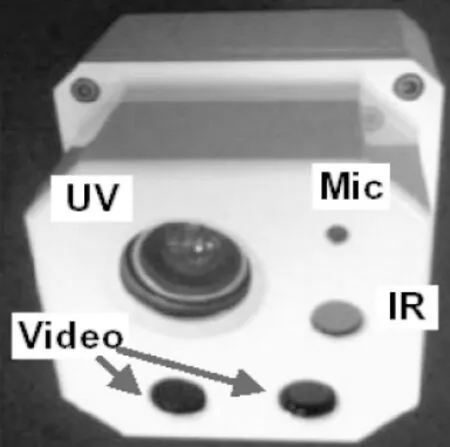
图6 VS5系列试验中的VSP
VS5基于报警响应时间的性能对比结果见表2、3。

表2 VSP与点式商业探测系统报警响应速度对比 %
注:30 s内报警、120 s内报警表示在最先报警探测报警后的30 s、120 s内报警。

表3 两种VSP报警响应速度对比 %
明火实验最先报警响应百分比总和超过100%是因为存在同次实验两系统同时最先报警情况。阴燃实验百分比总和小于100%,是因为有3次实验没有系统能够响应,这些实验包括两次电缆阴燃火和一次油布阴燃火。其中两次电缆阴燃火源布置于过道,过道光线昏暗且通风良好,
以至于没有探测器能够响应。
两种VSP系统探测事件能力相似,但是响应速度却差别很大。VSP1、VSP2仅对于一类明火、一类阴燃火和两类干扰源场景探测结果有差异。对于明火源VSP1、VSP2的响应速度相似,而对于阴燃火源,VSP1明显快于VSP2,VSP1首先探测阴燃火的比例为54%,而VSP2仅为25%。结果表明,VSP2在多数情况下比VSP1响应慢1~2 min。造成响应性能上的差异主要是因为VSP2采用的SiginiFire的VID系统和VSP1采用的SFA系统的性能差异。总之,VSP1总体上性能优于VSP2,因此以VSP1为代表评估VSP系统性能。
由于立体传感系统具备探测水、气泄漏事件的能力,以及良好的抗干扰能力(尤其是对于焊接干扰源),VSP系统性能优于独立VID系统和点式感烟探测系统。VSP系统在探测正确率与VID和点式探测器类似,但是VSP实际能探测火源的次数比VID多,比如,VSP1探测到56次火源(66次事件中的85%),而其采用的SFA的VID系统仅探测到47次火源(59次事件中的80%)。同样VSP增强了其组件VID系统的抗干扰能力,VSP1干扰源实验的正确识别率为78%,而VID系统仅为51%。
除了强大的探测能力,VSP系统较点式感烟探测系统响应更快。VSP1能首先探测到82%的明火火源,以及74%的阴燃火源。在首次报警的120 s内,VSP1能够响应多数火源,而点式感烟探测系统仅能响应不到21%。换言之,大部分点式探测器报警较VSP晚2 min。
3 结论
1)VSP系统可应用于各类舱室中的各类事件源:明火、阴燃火源、水释放、气体释放,同时能抵抗各种干扰源,其在小空间结构的灵活性被成功证实。
2)VSP系统通常比VID、点式感烟探测系统在探测范围、探测火灾、抗干扰、响应速度等方面性能优越。
3)自动灭火控制系统(AFSS)与VSP系统成功对接。
[1] ROSE-PEHRSSON S L, OWRUTSKY J C, GOTTUK D T, et al. Phase I: FY01 investigative study for the advanced volume sensor[R].NRL/MR/6110-03-8688, US Naval Research Laboratory,2003.
[2] WRIGHT M T, GOTTUK D T, WONG J T, et al. Prototype early warning fire detection system: Test series 1 results[R]. NRL/MR/6180-00-8486, US Naval Research Laboratory,2000.
[3] WRIGHT M T, GOTTUK D T, WONG J T,et al. Prototype early warning fire detection system: Test series 2 results[R]. NRL/MR/6180-00-8506, US Naval Research Laboratory,2000.
[4] WRIGHT M T, GOTTUK D T, WONG J T, et al. Prototype early warning fire detection system: Test series 3 results[R]. NRL/MR/6180-01-8592, US Naval Research Laboratory,2001.
[5] GOTTUK D T, WRIGHT M T, WONG J T, et al. Pro-totype early warning fire detection system: Test series 4 Results[R]. NRL/MR/6180-02-8602, US Naval Re-search Laboratory,2002.
[6] WALES S C, MCCORD M T, LYNCH J A, et al. Acoustic event signatures for damage control: water events and shipboard ambient noise[R]. NRL/MR/7120-04-8845, US Naval Research Laboratory,2004.
[7] GOTTUK D T, HARRISON M A, SCHEFFEY J L, et al. An initial evaluation of video-based fire detection technologies[R]. NRL/MR/6180-04-8737, US Naval Research Laboratory,2004.
[8] LYNCH J A, GOTTUK D T, ROSE-PEHRSSON S L, et al. Volume sensor development test series 2-lighting conditions, camera settings, and spectral and acoustic signatures[R]. NRL/MR-MM/6180-04-8843, US Naval Research Laboratory,2004.
[9] OWRUTSKY J C, STEINHURST D A, NELSON H H, et al. Spectral based volume sensor component[R]. NRL/MR/6110-03-8694, [R] US Naval Research Laboratory,2003.
[10] STEINHURST D A, MINOR C P, OWRUTSKY J C, et al. Long wavelength video-based event detection, preliminary results from the CVNX and VS1 test series, ex-USS SHADWELL[R]. April 7-25, 2003. NRL/MR/6110-03-8733, US Naval Research Laboratory,2003.
[11] STEINHURST D A, LYNCH J A, GOTTUK D T, et al. Spectral-based volume sensor testbed algorithm development,Test Series VS2[R]. NRL/MR/6110-05-8856, Naval Research Laboratory, Washington, DC,2005.
[12] LYNCH J A, GOTTUK D T, ROSE-PEHRSSON S L, et al. Volume sensor development test series 4 results-multi-component prototype evaluation[R]. NRL/MR/6180-06-8934,2006.
[13] LYNCH J A, GOTTUK D T, ROSE-PEHRSSON S L, et al. Volume sensor development test series 5-multi- component prototype evaluation[R]. NRL/MR/6180-05-8931,2005.
猜你喜欢
舰船电子工程(2022年3期)2022-12-01
中南大学学报(自然科学版)(2022年6期)2022-08-01
中国特种设备安全(2022年4期)2022-07-08
中国铁道科学(2022年1期)2022-02-16
水上消防(2021年5期)2022-01-18
辽宁林业科技(2021年4期)2021-08-11
房地产导刊(2020年6期)2020-07-25
全球定位系统(2020年1期)2020-03-31
计算机与网络(2018年4期)2018-09-10
中国棉花(2017年10期)2017-11-04