
GNSS导航电文对接收机用户的性能影响分析
2013-01-14 06:12张蓓,赵昀,高米
无线电工程 2013年5期
张 蓓,赵 昀,高 米
(北京航空航天大学电子信息工程学院,北京100191)
0 引言
世界范围多个全球卫星导航系统(GNSS),包括美国GPS、欧盟Galileo系统及我国北斗卫星导航系统,正在历经系统升级或建设的快速发展。由不同GNSS系统发布的描述其电文结构及数据内容的规范文件可见,不同系统的电文设计存在差异[1]。Galileo系统在设计I/NAV电文时,首次提出了完好性电文的概念。而GPS电文在前后设计上的重要变化,从最初的NAV电文到之后的CNAV电文再到最新设计的CNAV-2电文,反映出系统在电文设计上存在改进空间,这与导航信号的情况十分相似。
导航电文是卫星导航系统的关键要素,系统以广播导航电文的方式向接收机用户提供定位、授时以及辅助信号捕获所必需的信息数据。导航电文的数据内容主要通过系统主控站处理若干系统监测站提供的观测数据而产生,并以一定的周期(通常不超过24 h)上载到导航卫星,再通过导航卫星发播到用户。系统确保电文数据的精度和时效性至关重要,而控制段误差则通过电文传递给用户。
由于仍缺乏正式和系统的导航电文分析方法及准则,对导航电文的分析存在不同的观点[2-5]。本文从接收机用户性能影响的角度,分析导航电文的设计依据,并将这种分析的解析方法通过专用的软件实现,用以支持导航电文的分析与设计研究。
1 电文对接收机用户性能影响分析
导航电文的主要作用是向用户提供以下导航所需信息:
①卫星时及星钟偏差修正模型参数;
②卫星星历参数;
③扩频码间群延迟修正;
④卫星健康标识;
⑤系统完好性告警标识;
⑥与控制段误差对应的等效测距精度指示(如GPS的URA);
⑦可用于辅助信号捕获的星座历书及相应的健康状态;
⑧单频用户所需的电离层延迟修正模型参数。
从接收机用户的角度,导航电文对解调门限、首次定位时间、精度和完好性构成影响。
1.1 解调门限
导航电文的信息速率影响用户接收机的解调性能,根据数字通信中有关数字调制信号误比特率的理论[6],具体的解调性能公式可表示为:

式中,Pbit(φ)为误比特率;φ为载波相位跟踪误差;C/N0为载噪比;rbit为电文数据编码后对应的符号速率;erfc(x)为互补误差函数,即
解调门限代表接收机解调出导航数据所需的最低载波比。在分析中,暂忽略取决于接收机设计的载波相位跟踪误差影响,假设φ=0。考虑误比特率应达到1×10-6,以满足用户对导航信道稳健性的需求。在上述条件下,分析GPS和Galileo系统的5种导航电文:GPS NAV、GPS CNAV、GPS CNAV-2、Galileo I/NAV和 Galileo F/NAV,它们的信息(符号)速率如表1所示。运用式(1)分别计算得到相应的解调门限,依次为26.02 dB-Hz、25.53 dB-Hz、23.53 dB-Hz、29.51 dB-Hz 和 22.52 dB-Hz,如图1(a)所示。这里考虑了信道编码的贡献,GPS(L1)NAV采用汉明编码,相应的编码增益不超过1.5 dB;GPS(L1)CNAV-2采用编码增益高的LDPC编码[7],相应的编码增益至少可达7 dB;其余电文类型由于采用卷积编码[8],相应的编码增益至少可达5 dB。

表1 导航电文信息速率与定位必需数据的周期及长度
如果用户对解调门限的相应需求为25 dB-Hz,如图1(a)所示,GPS CNAV-2和Galileo F/NAV均满足这一门限需求,GPS NAV和GPS CNAV略高于这一门限需求,而Galileo I/NAV因其125 bps的高速率,解调门限超出25 dB-Hz门限近5 dB。但Galileo I/NAV电文的主要目的是支持系统完好性,完好性所要求的高数据更新率所导致的高数据速率与稳健性实际上互为矛盾。
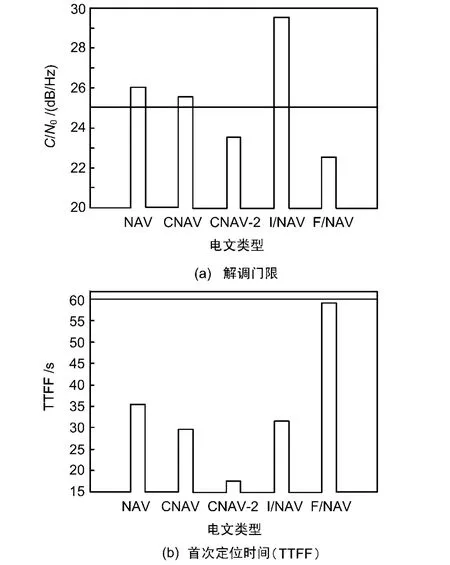
图1 GNSS导航电文解调门限与TTFF的比较
1.2 首次定位时间
TTFF是指导航接收机从开机(可进一步划分为冷启动、温启动或重捕的开机状态条件)直至完成定位解算给出用户的位置、速度及时间(PVT)估计值所需的时间。从导航电文角度,TTFF的主要影响因素为用户定位必需数据的获取时间。在分析中,暂考虑受电文影响最大的接收机冷启动条件下的TTFF,它取决于星历与星钟数据(CED)及系统时(STD)在电文帧中的重复周期、数据量以及信息速率。
基于统计方法,建立接收机电文比特的读取历元与导航定位所必需数据的获取时间的关系。具体方法如下:将接收机对电文比特的读取历元视为随机变量t,设必需数据获取时间TCED+STD的概率密度函数为f(t),则95%概率条件下对TCED+STD的估计(即 TTFF),可通过求解式(2)得到[9]:

式中,F(·)为累积概率分布函数;TCED+STD为接收机读取历元t的函数,其概率密度函数为f(t)。
分析GPS和Galileo系统的5种导航电文:GPS NAV、GPS CNAV、GPS CNAV-2、Galileo I/NAV 和Galileo F/NAV,它们的定位必需数据的重复周期及由数据量折算的时长,如表1所示。统计上述电文类型的 TCED+STD并迭代求解式(2)得到相应的TTFF,依次为 35.5 s、29.6 s、17.6 s、31.6 s 和59.2 s,如图 1(b)所示。
如果用户对冷启动条件下TTFF的相应需求为60 s,如图1(b)所示,上述电文类型均满足这一门限需求。但Galileo F/NAV的情况不容乐观,实际上TTFF还包括信号捕获、信号跟踪以及导航解算的时间开销,这部分的时间耗费为数秒甚至更长,这样实际的TTFF将超出60 s门限。而GPS CNAV-2具有冷启动条件下最短的TTFF,得益于CED数据在电文帧结构中成为独立的子帧,而这个子帧在短至15 min,长至2 h周期内维持数据不变[10]。由此,如果用户从这一子帧内任何一比特对应的历元时刻读入,都不会影响TCED+STD的结果,即均为一个主帧周期(18 s)。
1.3 精度
导航电文直接影响用户利用系统获得自身位置及时间的估计值的精度。除去用户和卫星相对位置的影响,即DOP,上述估计精度取决于用户等效测距误差。用户等效测距误差实际上包括星历误差、星钟误差、扩频码间群延迟、电离层延迟、对流层延迟和多径。依据电文提供的相应信息可以补偿扩频码间群延迟;对于单频导航用户,采用电文提供的电离层延迟修正模型参数,可以补偿约50%的电离层延迟;对于独立用户,对流层延迟与多径效应的补偿则需要依靠接收机自身。
通过导航电文体现的星历误差和星钟误差(也有可能包括群延迟)成为系统性能的制约因素。以GPS为例,如果导航卫星向用户播发电文数据的系统更新周期为24 h,以此为分析周期,利用GPS精密星历(星钟)作为基准数据,将其与电文广播的(预测)星历及星钟数据进行比较,由此确定的误差可视为星历及星钟误差,这2种误差可统称为控制段误差。以任意一天为例,所得到用户等效测距误差的控制段部分,如图2所示。分析图中的结果显示,星历误差约0.55 m(1σ),星钟误差约0.96 m(1σ)。这一结果与GPS系统向用户承诺的控制段误差不超过3 m(1σ)的情况十分符合。

图2 用户等效测距误差的控制段部分(以GPS为例)
1.4 完好性
与系统完好性关联的导航电文信息数据包括完好性告警标识以及与控制段误差对应的等效测距精度指示。后者可用于以设定的置信概率计算系统误差限的估计值(又称保护级),由于同时与用户和卫星的相对位置有关,并取决于具体导航服务的完好性指标需求,暂略去对于等效测距精度指示的分析。
系统一旦对于当前导航服务不可用并且在特定时间(即告警时间)内用户没有得到相应告警,将此视为完好性风险。为此,完好性告警标识的用户获取时间是决定完好性性能的关键时延。这一关键时延受到电文帧结构及信息速率的制约,Galileo I/NAV电文[11]所支持的完好性告警标识重复周期仅为1 s,可与之相比的GPS CNAV电文的完好性告警标识重复周期为6 s,而其余电文类型的完好性告警标识重复周期均相对较长。另一方面,接收机用户如果利用冗余的卫星信号观测量则可以实现自主完好性监测。从而完好性主要依靠系统还是联合用户的自主监测,成为系统在完好性设计上的分歧。
2 支持GNSS电文分析的软件工具
基于上述电文对接收机用户性能影响的分析方法,设计GNSS电文分析软件工具,以提高对现有GNSS导航电文分析的效率,同时,有效支持用户实现自定义的电文设计。
基于VC++软件开发平台并采用与Matlab的混合编程,实现了GNSS电文分析软件工具。软件主界面设计如图3所示,图中左侧为用户设置输入区,右侧为电文结构及参数显示区,“性能分析”菜单包括上一节所述的各项性能影响分析。

图3 导航电文分析软件的主界面设计
VC++用于实现人机交互与电文设计的用户配置,Matlab用于实现用户性能分析的模型与分析结果显示输出。用户接口实现主要使用MFC库,包括窗口、对话框、按钮和用户响应处理的实现。在辅助用户电文设计模式下,支持用户通过界面配置操作实现电文结构及信息内容的设计,以及对设计的便捷修改与灵活配置。以XML文件保存所有电文参数的结构信息,包括参数名、参数在电文帧结构中的起始位置、参数基于相应的比例因子转换得到比特字段所占长度。当需要更改导航电文结构时,只需修改XML文件中的电文参数结构信息,则读取文件即可得到用户配置后的导航电文。
3 结束语
导航电文的设计关系到卫星导航系统的性能。对导航电文的深入分析有助于接收机用户对既有GNSS系统通过电文提供的信息数据加以充分利用,并促进形成导航电文设计的系统理论方法,进而推动以系统性能提升为准则的导航电文创新设计。
本文从接收机用户性能的角度,给出了导航电文对解调门限、首次定位时间、精度和完好性影响的分析方法及初步分析结果,并在此基础上设计实现了相应的导航电文分析软件。
[1] 陈金平,王梦丽,钱曙光.现代化GNSS导航电文设计分析[J].电子信息学报,2011,33(1):211-217.
[2] 陈 南.卫星导航系统导航电文的性能评估[J].武汉大学学报,2008,33(5):512-515.
[3] 陈 南,杨 力,丁 群.Galileo开放服务导航电文特点分析[J].测绘科学技术学报,2008,25(5):329-335.
[4] ZHANG W,LIN V.New GNSS Navigation Messages to Facilitate Fast TTFF and High Sensitivity[C]∥Proceedings of CPGPS.Beijing:Scientific Research Publishing,2009:285-293.
[5] LU S,ZHAO Y,KOU Y,et al.Analysis of Civil Navigation Message Format for GPS Modernization[C]∥Proceedings of CPGPS.Beijing:Scientific Research Publishing,2009:335-340.
[6] PROAKISJ G.Digital Communications,4thEdition[M].New York:McGraw-Hill Companies,2001.
[7]GPSW LAAFB.NAVSTAR GPSSpaceSegment/User Segment L1C Interface[R].IS-GPS-800,Revision A,California:GPSW LAAFB,2010.
[8] 李志成,刘基余.GPS L5导航电文的编码仿真研究[J].导航,2005,41(3):50-54.
[9] PAONNI M,ANGHILERIM,WALLNER S,etal.Performance Assessment of GNSS Signals in Terms of Time to First Fix for Cold,Warm and Hot Start[C]∥Proceedings of the ION ITM 2010.San Diego:ION,2010:2 942-2 955.
[10]STANSELL TA,HUDNUT KW,KEEGAN R G.Future Wave:L1C Signal Performance and Receiver Design[J].GPS World,2011(4):30-36,41.
[11] Galileo Project Office.GIOVE-A Navigation Signal-inspace:Interface Control Document[R].OS SIS ICD,Issue 1,Brussels:European Union,2010.
猜你喜欢
大地测量与地球动力学(2023年2期)2023-02-04
汽车实用技术(2022年4期)2022-03-07
中国金属通报(2021年9期)2021-08-06
中国外汇(2020年7期)2020-07-10
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
火力与指挥控制(2019年4期)2019-06-14
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
