
TCA2003测量机器人在水库大坝基准网测量中的应用
2013-01-18 16:13张文雅
地下水 2013年6期
张文雅
(陕西省水利电力勘测设计研究院测绘分院,陕西西安710002)
TCA2003测量机器人在水库大坝基准网测量中的应用
张文雅
(陕西省水利电力勘测设计研究院测绘分院,陕西西安710002)
外部变形监测作为水利工程安全监测的重要组成部分,而TCA2003高性能精密全站仪自动目标识别与自动跟踪技术的应用,使得外部变形监测的技术手段更为先进,操作更为方便。采用TCA2003全站仪自动观测技术在李家河水利枢纽安全监测基准网中的实践应用,对其成果精度进行分析,结果认为TCA2003测量机器人用于变形监测工作自动化程度高,精度可靠,并能大大的提高作业效率。
TCA2003自动全站仪;监测基准网布设;监测基准网观测;数据处理
随着人们对建筑物的不断认识,变形监测工作愈来愈受到重视,但混凝土大坝的监测精度要求很高,一般传统方法难以达到。测量机器人的深入应用,其优势在混凝土大坝的安全监测中得到充分发挥。我院在在李家河水利枢纽安全监测基准网的实施中,采用TCA2003测量机器人,不仅满足控制网的精度要求,而且提高工作效率。
1 TCA2003全站仪及徕卡TCA机载自动监测软件
1.1 TCA2003全站仪
瑞士Leica公司生产的TCA2003全站仪标称精度为:一测回方向中误差 ±0.5″;测距中误差 ±1mm+1ppm。其主要部件ATR(Automatic Target Recognition)被安装在全站仪的望远镜上,与望远镜同轴,性能稳定可靠,启动ATR测量时,当全站仪发送的红外光被反射棱镜返回并经仪器内置的CCD相机判别接受后,马达就驱动全站仪自动转向棱镜,并自动精确确定棱镜中心位置,使全站仪具有目标自动识别、精确瞄准目标、自动正倒镜测量、自动完成数据采录,被称为测量机器人。TCA2003全站仪配以专用软件,就可以使整个观测过程自动完成。[1]
1.2 徕卡TCA机载自动监测软件
软件的设计、开发依据国家三角测量规范及其它相关工程技术标准。该软件配合TCA2003全站仪,系统实现了高效、便捷的自动化测量,大大提高了工作效率,降低了劳动强度,同时满足了内、外业数据一体化、规范化的作业要求。
软件的主要特点有:①操作简单。正常情况下,无论有多少个方向、多少个测回,用户只需按数次键即可完成所有项目的设置;观测时只需按一个键就可完成所有测回;②限差设置灵活。可以根据具体需要自定义各项限差,自动默认上次设置的限差值,通常无需修改;③只需学习一次。对于同一个测站,只需在第一次观测时进行学习测量,以后观测时直接调用该测站的学习结果;④全自动观测。完成各项设置后,仪器可自动照准各目标点,自动测距、测角,并实时检查各项误差,超限后自动处理。能完全避免因外业观测数据不合格造成的复测和人为造假。
2 TCA2003测量机器人在李家河大坝监测基准网中的应用
辋川河引水李家河水库工程位于西安市蓝田县,水库工程总库容为5260万 m3,主要建筑物拦河大坝、泄水建筑物、引水建筑物等。
拦河坝为碾压混凝土抛物线双曲拱坝,坝项高程884 m,最大坝高98.5 m,坝顶弧长351.71 m,设计洪水标准为50 a一遇。水库正常蓄水位880.0 m,死水位839.0 m,设计洪水位 880.0 m。
依据工程要求和规模,监测基准网由7座具有强制对中标志的钢筋混凝土观测墩组成三维网,平面精度为专一级,高程精度为二等。
2.1 监测基准网网形设计
本工程监测的对象大坝、近坝区高边坡及电站厂房背坡相距较近,故水平位移监测基准网整体布设。
根据施工区域地形、监测部位分布情况以及精度要求,水平位移监测基准网采用边角网。首先在1:2000地形图上布设网点,然后经实地选点确定基准点布设7个(P1~P8、P5破坏),工作基点6个(PG1~PG6),上述13点构成边角全测网,网点布置见图1。

图1 大坝监测三维控制网索引图
基准点位选设:大坝上游选设P2、P3两点,下游(包括电站厂房区)P1、P4、P8、P6、P7 共 5 点。
工作基点选设:大坝下游选设PG1、PG2两点,大坝上游选设PG3、PG4两点,电站厂区选设PG5、PG6两点。
其中:PG1、PG2、PG3、PG4共4个基点主要用于监测大坝坝顶LD1~LD8等8个水平位移监测点;P1、P2、P3、PG1、PG2等5个基点主要用于监测近坝区(左右坝肩)高边坡LD9~LD31等23个水平位移监测点;PG3、PG4作为视准线两端工作基点,用于视准线法校核坝顶拱冠测点LD4;PG5、PG6两个基点用于监测电站厂房背坡LD32~LD34共3个水平位移监测点。
基准点和工作基点一次进行设计,但目前只有基准点具备建造标墩条件并进行首期观测,而工作基点PG3要视工程施工进度进行实施,待工作基点实施后再进行整体网数据处理,这样基点精度统一。
2.2 限差设置
根据《水利水电工程测量规范》(规划设计阶段)(SL197—97)专一级网的精度标准确定外业观测限差见表1、表2、表3。

表1 水平角方向观测的主要技术要求
观测前按以上限差在TCA2003全站仪上进行测站设置,将气象改正参数按标准设置。测站设置完成后,在盘左状态按顺时针方向依次测量各目标点一次,即完成仪器学习测量。然后进行正式观测,测站全部观测可自动完成。

表2 天顶距观测的主要技术要求
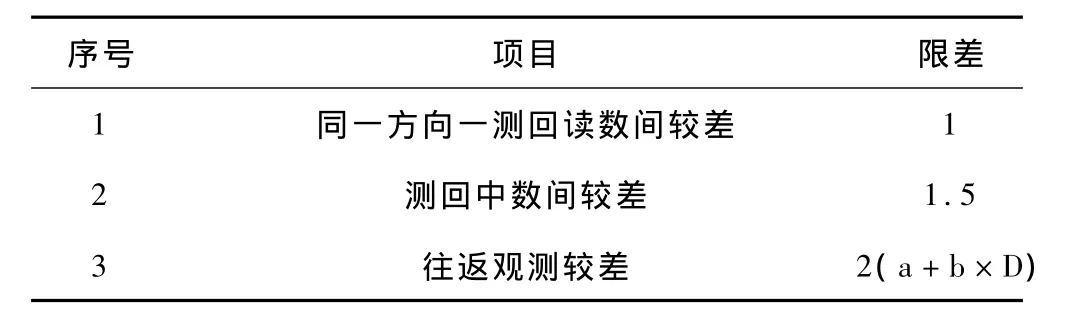
表3 测距观测的主要技术要求 mm
2.3 综合误差测定
在监测网测量前,首先应对仪器进行综合误差测定,目标点距离仪器大于100 m,倾斜角小于±9°;对于水平轴倾斜误差的测定则采用大于±27°的目标点进行测定,其2c和指标差均小于5″,并且进行了ATR1准直差的测定。
2.4 监测基准网观测
根据《水利水电工程测量规范》(规划设计阶段)(SL197—97)专一网的精度标准确定水平角观测15测回,其垂直角也进行15测回观测,边长测量进行了15测回60测次自动观测记录,所有边长在不同的时段进行对向观测。在观测过程中程序自动判别设置的各限差,若超限自动重测,符合要求后再进行下一测回的观测,以上操作全部由监测系统自动完成。
2.4.1 水平角观测
由于监测网精度高,本次观测早上6点到9点左右,下午在16点到19点左右进行观测,由于照准标志数量所限,部分测站水平角进行了分组观测,分组观测包括两个共同方向(其中一个为共同零方向);其两组观测角值之差见表4所示,其值均小于测角中误差的2倍(2mβ=±1.0″);按等权分组观测进行了测站平差。首期对基准网进行了两次独立观测,全网共17个三角形,第一次三角形闭合差最大为△P1P2P4+1.52″,三角形闭合差最小为△P1P8P6 - 0.10″,按菲列罗公式计算的测角中误差为 ±0.49″;第二次三角形闭合差最大为△P1P2P3+1.43″,三角形闭合差最小为△P8P4PG2 -0.15″,测角中误差为 ± 0.47″,均小于设计测角中误差为 ±0.5″要求。
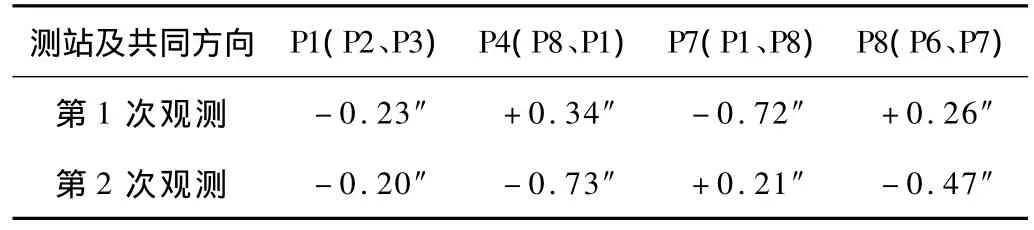
表4 分组观测角度之差统计表
2.4.2 垂直角观测
大坝监测基准网的高程采用几何水准较为困难,故采用三角高程法获取监测基准网点高程。高程分别从水准工作基点GH2传递到 PG4、水准工作基点 GH10传递到 P1,往(返)测垂直角观测9测回,边长测量进行了9测回36测次自动观测记录。GH2、GH10为监测基准网高程起算点,监测基准网点高程由监测基准网点组成附和线路观测而获得。
2.4.3 边长测定
本次水平边长采用高差和斜距进行改正,因此我们采用以下措施:
(1)测站仪器高和镜站棱镜高采用专用量高游标卡尺量取。分别从三个位置量取其高度,取平均值作为仪器高和觇标高,量取高度读数至0.02 mm。
(2)测站、镜站分别在观测开始、中间、结束时测定温度、气压,取均值后按检定证书的修正值进行改正。
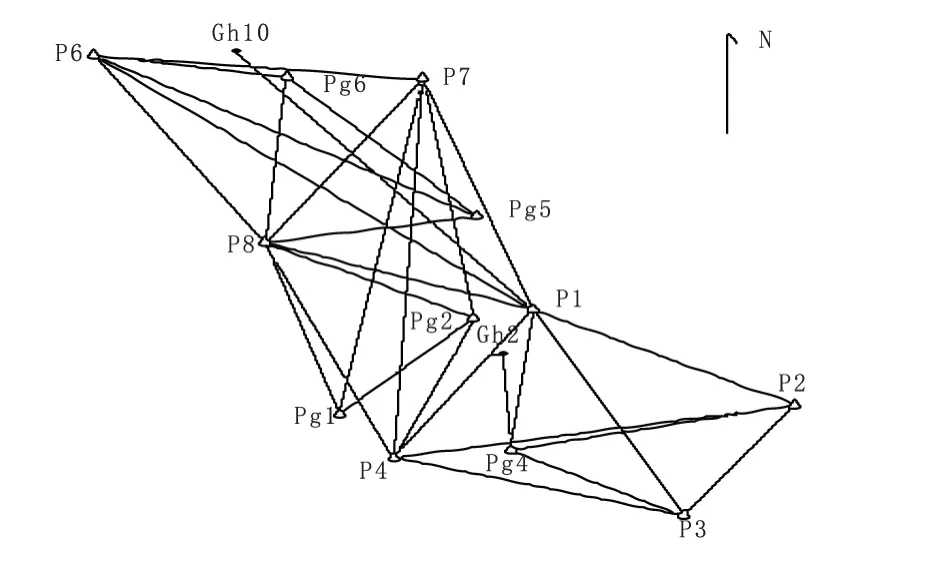
图2 基准网三角高程观测略图
(3)斜距经仪器加乘常数、气象改正后,分别采用往返测垂直角计算测边高差中数,再利用斜距和高差计算测边水平距离。高差、平距计算在Excel中进行,见下表:
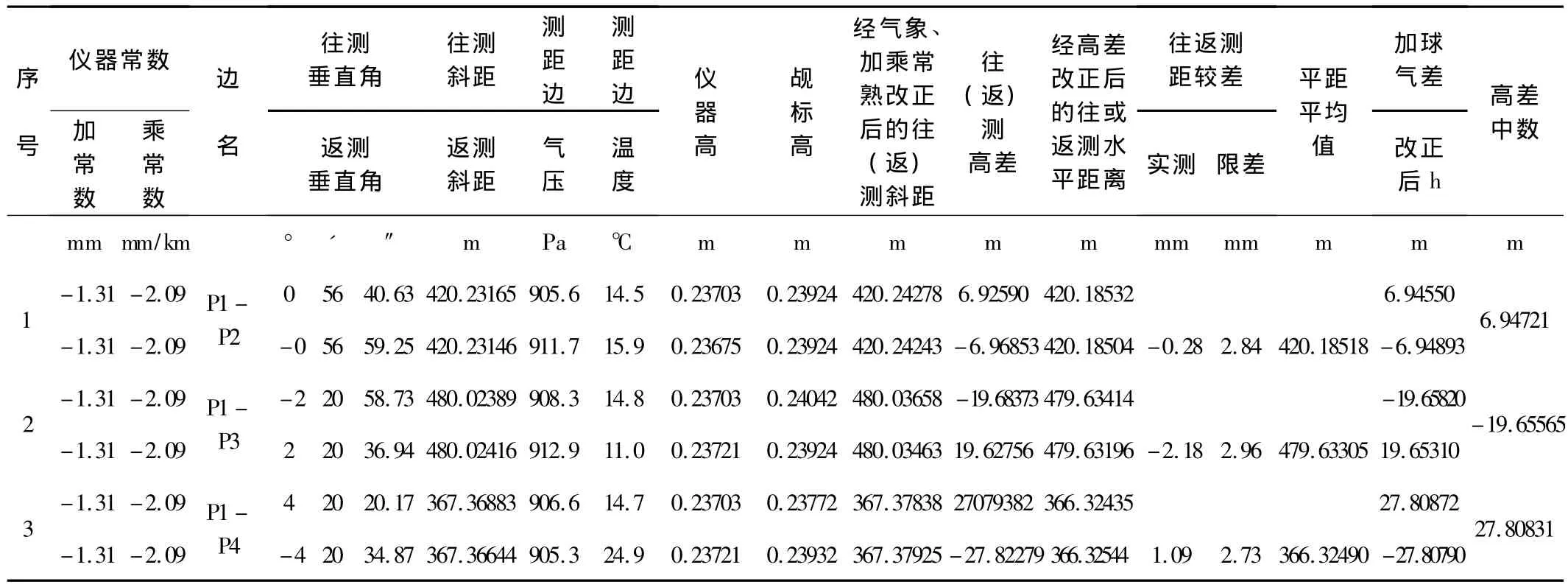
仪器常数 往测垂直角往测斜距测距边测距边经气象、加乘常熟改正后的往(返)测斜距往 经高差改正后的往或返测水平距离往返测 加球序 号距较差 气差 高差加常数乘常数边 名返测垂直角返测斜距气压温度仪器高觇标高(返)测高差中数实测 限差平距平均值 改正后h mmmm/km ° ′ ″ m Pa℃ m m m m m mmmm m m m 123-1.31 -2.09-1.31 -2.09-1.31 -2.09-1.31 -2.09-1.31 -2.09-1.31 -2.09 P1-P2 P1-P3 P1-P4 0 5640.63 420.23165 905.6 14.5 0.23703 0.23924 420.24278 6.92590 420.18532 6.94550-0 56 59.25 420.23146 911.7 15.9 0.23675 0.23924 420.24243 -6.96853420.18504 -0.28 2.84 420.18518 -6.94893 6.94721-2 20 58.73 480.02389 908.3 14.8 0.23703 0.24042 480.03658 -19.68373479.63414 -19.65820 2 20 36.94 480.02416 912.9 11.0 0.23721 0.23924 480.03463 19.62756 479.63196 -2.18 2.96 479.63305 19.65310-19.65565 4 20 20.17 367.36883 906.6 14.7 0.23703 0.23772 367.37838 27079382 366.32435 27.80872-4 20 34.87 367.36644 905.3 24.9 0.23721 0.23932 367.37925 -27.82279 366.32544 1.09 2.73 36 27.80831 6.32490 -27.80790
全网测距边28条,最大边长(P1—P6)818.993 m,最短边长(PG1—PG2)276.969 m。根据往返测距较差分别计算得:第一次观测的平均测距中误差为1.06 mm,第二次观测的平均测距中误差为1.05 mm,其值均小于规范规定±2.5 mm的要求。
2.4.4 数据处理及精度统计
外业观测数据验算合格后,采用清华山维《工程测量控制网微机平差系统》软件,分别进行平面网和高程网的处理。平面网以P1为坐标起算点(P1~P4边做为起算方位边),边长投影至840 m高程面,按一点一方位的独立网进行数据处理。高程网以GH2、GH10为高程起算点,进行数据处理。首期两次独立观测数据处理后精度统计见表5。

表5 首期两次独立观测成果精度统计表
从表5精度指标统计结果可以看出,大坝监测三维网首期两次独立观测成果达到设计预期要求,取首期两次独立观测成果的均值作为大坝监测三维网的基准值。
3 结语
(1)自动观测减少人为因素的误差,提高工作效率。该软件优点具有操作简单、限差设置灵活、只需学习一次便可自动观测,但它不能将水平角、垂直角、边长分别设置,当水平角设置几个测回,垂直角和边长同样观测几个测回。
(2)天气对观测的影响较大,日出、日落及中午(10:30—15:00)前后,空气抖动比较大,十分不利于观测,应避开该段时间进行观测。
(3)棱镜应精确的对准仪器,棱镜面上无水雾或灰尘。
(4)采用精密专用量高游标卡尺,采用精度较高干湿温度计并且气压以检定证书的修正值进行改正。
[1]水利水电工程测量规范.(规划设计阶段)(SL197—97).
[2]《徕卡TCA机载自动监测软件》安装手册.
P258
B
1004-1184(2013)06-0153-03
2013-09-17
张文雅(1967-),男,陕西长安人,工程师,主要从事水利水电工程测量工作。
猜你喜欢
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
工程与建设(2019年3期)2019-10-10
劳动保护(2018年8期)2018-09-12
百科知识(2018年6期)2018-04-03
公民与法治(2016年19期)2016-05-17
电测与仪表(2016年9期)2016-04-12
读者·校园版(2015年7期)2015-05-14
电子设计工程(2014年6期)2014-02-27
中国三峡(2013年11期)2013-11-21
