
一种基于参数化C A D软件进行机械系统动力学求解的方法
2013-04-09 06:57付正波
机械工程师 2013年2期
付正波
(中冶南方工程技术有限公司,武汉 430233)
1 引言
在机械设计中,常常遇到较为复杂的动力学和运动学问题。传统处理方式一般是对该机械系统进行简化,然后按照动力学条件或者几何条件给出相关约束,建立机械系统动力学方程组,通过求解该方程组,最终得到所需结果。这种方法虽然能够精确地求解出机械系统的动力学解析结果,但是需要对系统进行几何和动力学建模及求解,过程较为复杂繁琐,容易出错,而且需要花费较多的时间和精力。随着CAE技术的进步,出现了以MSC/ADAMS为代表的动力学软件,可对机械系统进行动力学可视化建模及求解[1],但由于其高昂的费用阻碍了软件广泛使用,且其求解过程也较为繁琐,对设计人员的能力要求较高。
本文提出了一种简单、可靠的替代方法,能够通过使用设计人员所熟悉的参数化CAD软件,解决机械系统的动力学问题。参数化CAD软件自1980年代初提出以来,得到了十分迅猛发展,现已成为人们常用的设计工具和手段。参数化CAD软件的核心是其内置的几何求解器,设计人员通过在程序界面对几何元素施加可视化约束(如共点),程序自动地将几何约束转化成非线性方程组,并调用内核求解器,最终求得所需的结果[2]。参数化CAD软件的这种工作机理为其进行机械系统的动力学求解提供了可能:可以通过对动力学系统进行几何建模,然后调用CAD系统的求解器,求解出所需的结果。
基于上述思路,本文以偏心轮式步进梁为例,在SolidEdge环境中对其进行动力学模型的几何建模,分别对步进梁升降液压缸的受力及步进梁动梁的升降速度进行了分析,为其结构设计及电气控制提供了数据支撑。
2 偏心轮式步进梁结构及功能描述
步进梁为十分常见的冶金设备,主要用于钢卷的运输及存放。而偏心轮式步进梁由于其结构紧凑,运行稳定,维护简单,得到了广泛的应用。图1为偏心轮式步进梁结构示意图。
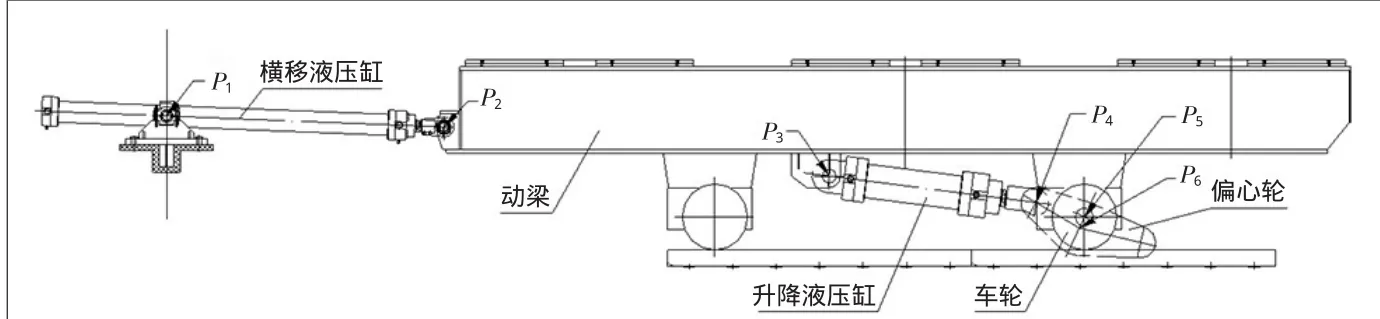
图1 偏心轮式步进梁结构简图
步进梁主要由横移液压缸、动梁、升降液压缸、偏心轮和车轮五大部分组成。其中升降液压缸承载能力大,其运行速度决定了动梁升降速度,所以需要对其进行详细分析。对步进梁机构进行简化,可建立图2所示步进梁运动机构简图。步进梁横移液压缸尾部与地面铰接,铰接点为P1;横移液压缸头部与动梁铰接,铰接点为P2;升降液压缸尾部与动梁铰接点为P3;升降液压缸头部与偏心轮铰接点为P4;偏心轮与车轮铰接点为P5;偏心轮与动梁铰接点为P6。

图2 步进梁机构简图
步进梁上升的动作过程为:升降液压缸(HYC2)伸出,P4点沿X方向运动,P2、P3、P6点沿Y方向运动(步进梁上升);由于横移液压缸没有动作(亦即其长度没有变化),所以导致P2点绕P1点上升。P5点水平运行状态未知。
3 偏心轮式步进梁几何建模
步进梁机构在参数化CAD软件中的几何建模十分方便,本文根据某工程项目中步进梁的实际结构尺寸,在SolidEdge的草图模块中进行几何建模(需要特别指出的是,在任何参数化CAD中进行该几何建模均可),如图3所示。由于在步进梁升降的过程中,横移液压缸没有动作,因此将横移液压缸长度固定,施加长度尺寸约束(2552)。铰接点P1与地面固定,所以将其固定于坐标原点。各铰接点处施加共点约束。铰接点P2、P3、P6均在动梁上,只有平行运动而无旋转运动,分别施加P2、P3坐标差值约束(445,3448)和 P3、P6坐标差值约束(470,2302)。偏心轮铰接点P4、P5、P6为一体,由于偏心轮有旋转运动,施加 P4、P6两点之间的长度约束(460)和 P5、P6两点之间的长度约束(110)以及直线 P4P6和 P5P6间角度约束(85°)。P5只能水平移动,且高度固定,对该点施加Y轴坐标约束(915)。升降液压缸长度作为输入变量,从最小长度变化至最大值(1919~2759)。至此,偏心轮式步进梁的几何模型建立完成。
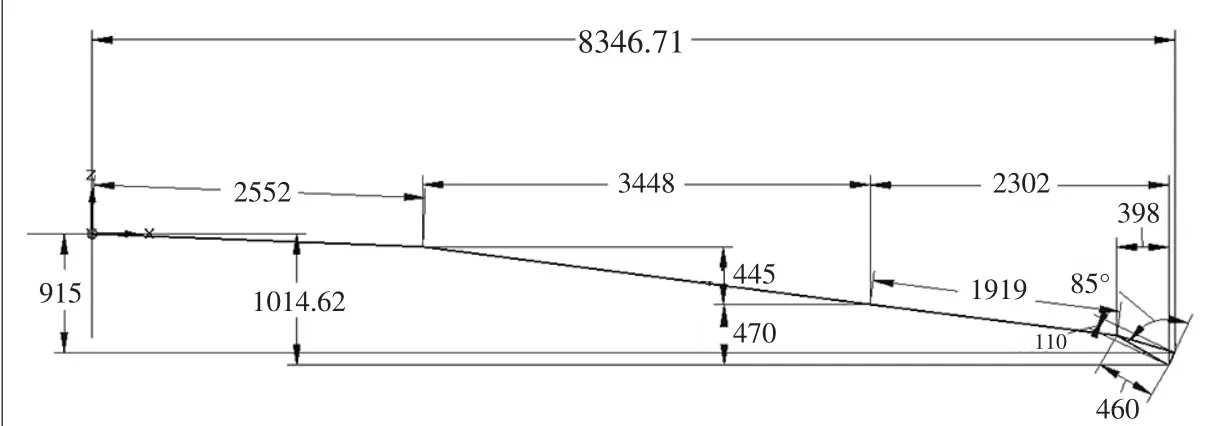
图3 步进梁几何建模
4 偏心轮式步进梁液压缸在升降过程中的受力分析
偏心轮式步进梁在升降过程中,由于升降液压缸作用力臂的长度不断变化,且重力作用的力臂也不断变化,因此在结构设计时,需要求出液压缸最大作用以作其设计选型依据。对偏心轮进行受力分析,将P6点视为支点,则升降液压缸输出力Fc与车轮支反力Fn力矩代数和为零,如图4所示。

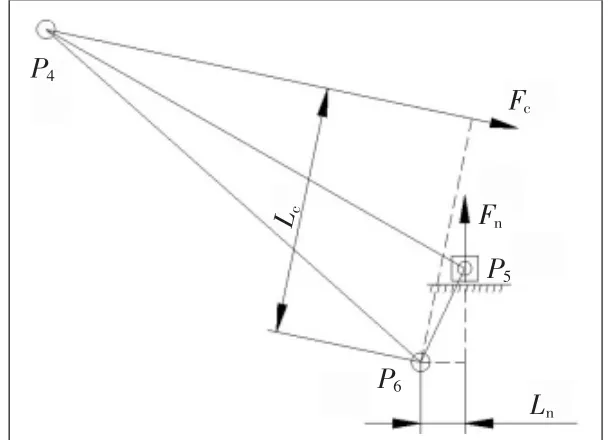
图4 偏心轮受力示意图
其中Fn在动梁接触钢卷前为动梁自重,在动梁接触钢卷后为步进梁和钢卷的重力和。
在SolidEdge几何模型中,新增用户变量Fc,其值定义为Ln/Lc。通过给定不同的升降液压缸长度,最终求得不同的Fc/Fn值,将结果整理得如图5所示曲线。可见,当液压缸长度小于2000mm时,随着液压缸长度的增加其受力急剧减小,其长度在2000~2700mm区间,其受力波动较为平缓;之后,其受力变化又较快。当液压缸长度最小时,其比值最大,为0.626,但由于此时仅为步进梁自重,所以液压缸实际输出力并不大。

图5 升降液压缸输出力
5 液压缸运动速度与步进梁升降速度的关系
步进梁的升降速度是步进梁运动学设计的关键参数之一,因为其升降速度过大会导致动梁接触钢卷时造成冲击;其升降速度过小又会影响生产节奏。步进梁升降的速度又取决于升降液压缸的动作速度,因此需要找出两者的关联关系,然后通过控制升降液压缸的动作速度来实现对步进梁升降速度的控制。
通过上述的几何建模,分别给出不同的升降液压缸长度求得P6点的高度,然后对该高度值进行简单的数据处理,即可得到在不同液压缸长度位置下动梁的升降速度,或者液压缸动作速度与动梁升降速度的比值,如图6所示。

图6 动梁升降速度
6 升降过程中车轮的波动
如前所述,步进梁在升降过程中,P5点会有水平方向移动,通过求得其X轴方向坐标值可以得到移动的具体情况,如图7所示。
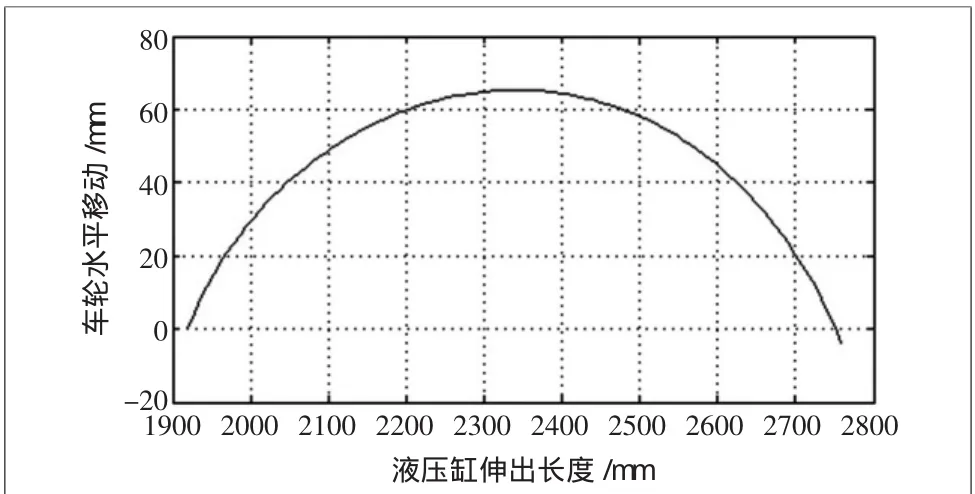
图7 车轮水平移动
7 结语
本文通过在SolidEdge软件中对偏心轮式步进梁进行几何参数化建模,然后调用SolidEdge内置的几何求解器,分别求解出步进梁在升降过程中升降液压缸受力、步进梁动梁升降速度与液压缸长度的变化关系。通过这个工程实例,介绍了通过参数化CAD软件进行机械系统的动力学模型的几何建模及求解过程。作为动力学CAE软件的替代方法,这是一种低成本的方法,具有直观高效、简单易学等特点,特别适合于工程技术人员在设计前期进行机械系统的动力学问题分析,亦可广泛应用于机构优化设计等其他领域。
[1]陈立平,张云清,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[2]王波兴.几何约束系统若干关键技术的研究与实践[D].武汉:华中科技大学,2001.
猜你喜欢
轴承(2022年1期)2022-06-07
演艺科技(2021年7期)2021-09-01
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
中国金属通报(2019年4期)2019-07-29
浙江大学学报(工学版)(2016年2期)2016-06-05
现代工业经济和信息化(2016年5期)2016-05-17
石油化工建设(2015年6期)2015-12-01
轴承(2014年9期)2014-07-24
组合机床与自动化加工技术(2014年10期)2014-03-01
