
四轮转向汽车电子控制技术
2013-04-16 10:45
电子世界 2013年13期
1.前言
随着现代道路交通系统和现代汽车技术的发展,人们对汽车的转向操纵性能和行驶稳定性的要求日益提高。作为改善汽车操纵性能最有效的一种主动底盘控制技术——四轮转向技术。于二十世纪80年代中期开始在汽车上得到应用,并伴随着现代汽车工业的发展而不断发展。汽车的四轮转向(Four-wheel steering-4WS)是指汽车在转向时.后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。以改善汽车的转向机动性、操纵稳定性和行驶安全性。
随着对4WS这一领域研究的不断进展,出现了多种不同结构形式、不同控制方案的实用4WS系统。按照控制和驱动后轮转向机构的方式不同,4WS系统可分为机械式、液压式、电控机械式、电控液压式和电控电动式等几种类型。本文介绍的是电控电动式4WS系统。
2.电控电动式4WS系统的发展概况
从20世纪初,日本政府颁发第1个关于四轮转向的专利证书开始,对于汽车四轮转向技术的研究一直伴随着汽车工业的发展而进行着。1985年,日本的NISSAN在客车上应用了世界上第1例实用的4WS系统,开始了现代4WS系统的研究与开发。在技术相对成熟的4WS汽车中,大多数采用电控液压式4WS系统,主要用于前轮采用液压动力转向的4WS汽车中,这种4WS系统具有工作压力大、工作平稳可靠等优点。但由于液压动力系统在结构、系统布置、密封性、能耗、效率等方面的不足,尤其是在转向过程中存在着响应滞后的固有缺陷,使得电控液压式4WS系统在适应现代4WS汽车的转向灵敏性、准确性方面受到了束缚,不能满足汽车高速行驶稳定性的要求。1988年3月,日本铃木公司开发出电控电动式助力转向系统(EPS),首次装备在CERVO车上,有效地克服了液压动力转向系统的缺点。在EPS技术的基础上,电控电动式4WS系统应运而生。1992年,在日本本田序曲的汽车上采用了电控电动式4WS系统。1993年,在日产全新的LAUREL车系上也开始采用电控电动式的4WS系统。电控电动式4WS系统结构简单、布置容易、控制效果好。随着电子技术的飞速发展,计算机技术在汽车中的广泛应用,电控电动式4WS将是4WS汽车的发展趋势。
3.电控四轮转向系统的基本组成和工作原理
3.1 电控四轮转向系统的基本组成
电控电动式4WS系统是指采用电子控制、电机助力的4WS系统,前、后轮转向系统之间没有任何机械连接、油管连接装置,结构上相互独立。如图1所示.
典型电控电动式4WS系统主要由前轮转向机构、传感器、电控单元(ECU)、步进电动机.减速器和后轮转向机构等组成。本文介绍的电控电动式4WS系统前轮仍采用传统的转向系统,后轮采用电子控制、电机驱动的转向系统。
3.2 电控四轮转向系统的工作原理
转向时,传感器将前轮转向的信号和汽车运动的信号送入ECU,ECU进行分析计算,向步进电动机输出驱动信号,步进电动机动作,通过后轮转向机构控制驱动后轮偏转。同时ECU进行实时监视汽车状况,计算目标转向角与后轮实际转向角之间的差值,来实时调整后轮的转角。这样可以根据汽车的实际运动状态,实现汽车的四轮转向。
系统可设有两种转向模式,既可进入4WS状态,也可保持传统的2WS状态,驾驶员可通过驾驶室内的转向模式开关进行选择。当4WS汽车在行驶过程中电子控制系统出现故障时,后轮自动回到中间位置,汽车自动进入前轮转向状态,保证汽车像普通前轮转向汽车一样安全地行驶。同时仪表板上的4WS指示灯亮,警告驾驶员,故障情况被存储在ECU中,以便于维修时检码。
上述的电控电动式4WS系统后轮转向装置属车速感应型,其工作特点是后轮偏转的方向和转角大小主要受车速高低的控制,同时也响应前轮转角、横摆角速度的变化。ECU根据设定的控制策略,通过程序控制,实现汽车的四轮转向。在低速行驶或者方向盘转角较大时,前、后轮实现逆相位转向,且后轮偏转角度随前轮转角增大而在一定范围内增大。这种转向方式可改善汽车低速时的操纵轻便性,减小汽车的转弯半径,提高汽车的机动灵活性。在中、高速行驶或方向盘转角较小时,前、后轮实现同相位转向。使汽车车身的横摆角速度大大减小,可减小汽车车身发生动态侧偏的倾向,提高汽车高速行驶的操纵稳定性。
4.4WS系统电控部分的组成
4.1 传感器
传感器的功用是检测汽车转向时的有关运动物理量,并转换成电信号,输入到ECU中,供ECU进行分析计算。
4.1.1 前、后轮转角传感器
前、后轮转角传感器分别安装在前、后轮转向机构靠近车轮的一侧,采用非接触型霍尔元件传感器,用来检测前、后车轮的瞬时偏转角。
4.1.2 车速传感器
车速传感器安装在车速里程表的转子附近,采用光电式车速传感器,将汽车前进速度检测出来,以脉冲信号的形式输出,送入四轮转向系统ECU,同时将电信号输入到自动变速器ECU。
4.1.3 车身横摆角速度传感器
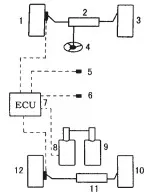
图1 电控电动式4WS汽车总体布置示意图
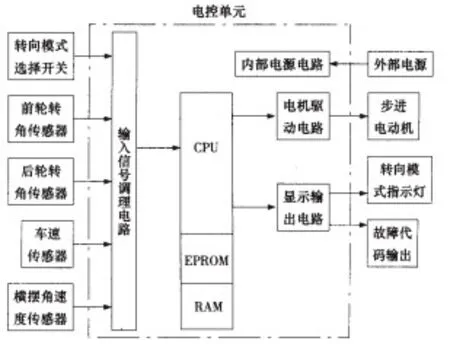
图2 电控电动式4WS系统控制电路框图
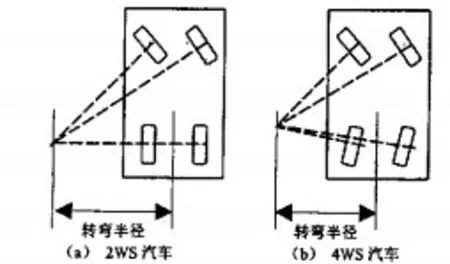
图3 2WS与4WS转向性能比较
车身横摆角速度传感器安装在汽车质心处的车身上,采用压电射流角速度传感器,检测汽车转向行驶时的车身横摆角速度,以电信号的形式输入ECU,ECU输出控制信号,实时控制汽车的转向运动,保证汽车转向行驶时的动态稳定性。
4.2 电控单元(ECU)
ECU是4WS系统的核心,其功用是根据制定的控制方案,按照编制的程序对各种传感器输入信号进行分析、计算、处理,输出一定的控制信号指令,驱动步进电动机动作。其电控单元的控制框图如2图所示,4WS系统ECU主要由输入信号调理电路、微处理器、输出信号处理电路、电源电路等硬件部分和控制程序、软件平台等软件部分组成。为保证控制系统可靠地工作,电控单元还必须采取有效的抗干扰措施和故障自诊断处理措施。
4.3 步进电动机
电动机采用步进电动机,其功用是根据ECU的指令输出适宜的转矩和转角,驱动后轮转向机构,控制后轮的转向,是后轮转向系统中的驱动执行元件。步进电动机是一种数字控制电动机,将数字式电脉冲信号转换成角位移,控制性能好,非常适合于单片机控制。采用步进电动机的主要优点是:步进电动机的角位移与输入脉冲数严格成正比,随动性好,可与角度反馈环节组成高性能的闭环数控系统;动态响应快,易于实现起停、正反转及变速;具有自锁和保持转矩能力;结构简单,坚固耐用,抗干扰能力强。
4.4 减速机构
减速机构的功用是降低步进电动机转速,增大步进电动机传递给转向传动机构的转矩,常采用蜗轮蜗杆机构或行星齿轮机构。
4.5 后轮转向传动机构
不同的车型,后轮转向传动机构的结构形式也不一样,可采用传统的转向机构形式,也可根据汽车后悬结构和行驶转向要求,设计特定结构形式的后轮转向机构。
5.电控电动式4WS系统的特点分析
5.1 电控电动式4WS与普通2WS系统对比分析
电控电动式4WS汽车与普通的2WS汽车相比,电控电动式4WS汽车具有如下特点:
(1)转向操作的响应加快,准确性高。
(2)转向操作的轻便性和行驶稳定性提高。低速时,转弯半径小,转向操作的机动灵活性提高(如图3所示)。
(3)超车时,变换车道更容易,减小了汽车产生摆尾和侧滑的可能性。抗侧向干扰的稳定性效果好。
5.2 电控电动式4WS与电控液压式4WS系统对比分析
电控电动式4WS系统与电控液压式4WS系统相比,也具有显著的优势:
①采用步进电动机作为后轮转向系统的驱动执行元件,动态响应快,改善了瞬态转向灵敏度,有效地降低了电控液压式转向系统的转向滞后特性。
②步进电动机的角位移与输入脉冲数严格成正比,在转动过程中,无累积误差,随动性好,转向控制精度高,回正性好。
③系统刚性大,有较高的惯性力矩,抗外界干扰的能力强。结构紧凑,体积小,质量轻,装配布置方便。
④步进电动机由蓄电池供电,发动机动力消耗。没有液压系统装置,系统的调整和检测方便,装配自动化程度高,能缩短系统产品的生产和开发周期。
6.电控电动式4WS系统的技术展望
目前在成型的4WS汽车中主要采用电控液压式4WS系统。虽然电控电动式4WS系统发展较晚,相应的技术还不够成熟,存在动力小、ECU复杂、成本高等不足之处,但随着现代电子技术、电机技术的飞速发展和应用,电控电动式4WS系统在技术上将不断完善,在转向控制性能、系统布置、节能等方面也将越来越显示其优越性,其应用前景广阔,必将取代电控液压式4WS系统,并成为4WS系统发展的主流。它的发展趋势有以下几点:
(1)针对4WS系统,进一步开发、设计高性能、高精度、高灵敏度的传感器,以便于正确地检测汽车的运动信号。
(2)将先进的控制理论与控制方法应用于4WS控制器的研究中,提高转向控制性能。
(3)改进步进电动机的结构和控制技术,消除步进电动机工作时存在的振荡、失步、振动、噪声等不足。
(4)研究、设计结构合理、布置方便的后轮转向传动机构,实现后轮的正确转向。
(5)进一步简化系统,减小系统结构的体积,控制生产成本。
(6)把4WS技术与其它主动安全技术(如4WD、ABS、ASR、ASC、DYC等)相结合,实现汽车主动底盘技术的综合控制,这是主动控制4WS系统研究的长期目标。
[1]余志生.汽车理论[M].机械工业出版社,2002.
[2]郭孔辉,轧浩.四轮转向的控制方法的发展[M].中国机械工程,1998,5.
[3]汪东明,陈南.电控电动式四轮转向系统的研究与发展[M].汽车电器,2004(4):9-10.
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
小学生学习指导·爆笑校园(2019年6期)2019-09-10
红蜻蜓·低年级(2015年11期)2016-02-02
汽车实用技术(2015年8期)2015-12-26
汽车文摘(2015年3期)2015-12-11
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
中国自行车·骑行风尚(2014年4期)2014-10-10
武夷学院学报(2014年5期)2014-07-19
