
低空无人机航摄系统在长距离输油(气)管道1∶2000带状地形图测绘中的应用研究
2013-05-15 00:57吕立蕾张卫兵胡树林
测绘通报 2013年4期
吕立蕾,张卫兵,胡树林,杨 军,巴 亮
(中国石油集团工程设计有限责任公司华北分公司,河北任丘062552)
一、引 言
长距离输油(气)管道是国家油气储运项目的重要组成部分,随着国家能源战略的加速推进,主支干输油(气)管道铺设工程越来越呈现出距离长、覆盖广、地形复杂、工期紧的特点,对线路测量也提出了更高的要求。
传统人工测量模式存在作业周期长、人力投入大、成本高等问题,甚至会出现困难地区无法施测,无法满足高难度、快节奏测量生产的需要。因此,借助新技术、新工艺来满足长距离输送管道项目开发时间短、任务重、质量高的需要显得极为迫切。
现有的卫星遥感技术虽然能够获取大区域的空间地理信息,但受回归周期、轨道高度、气象等因素影响,遥感数据分辨率和时相难以保证。常规航摄技术因受空域协调、起降场地选取、天气等因素的影响较大,缺乏机动快速能力,同时成本较高,灵活及精细度不足,无法及时有效地满足小范围高分辨率数据快速获取。而作为传统航空摄影测量补充手段的低空无人机航摄技术,凭借其自身机动灵活、高效快速、困难地区探测的航片获取技术,以及精准的后处理技术,大大降低了作业成本和生产周期[1-2],在“短、平、快”的长输管道线路地形图测绘方面具有明显优势。
管道测量主要包含线路测量、穿跨越工程测量和站场测量。其中,线路测量在中线两侧各100 m范围内,采用1∶2000比例尺;穿跨越工程和站场测量采用1∶500比例尺[3]。本文主要针对无人机航测系统在1∶2000线路测量中的应用展开研究。
二、无人机系统简介
低空无人机(unmanned aerial vehicle,UAV)航摄系统[4]是一种集无人驾驶飞行器、遥感及GPS导航定位等技术于一体建立起来的高机动性、低成本和小型化、专用化的遥感系统。如图1所示。

图1 无人机航摄系统组成
无人机航测系统主要包括无人机飞行平台、飞行控制系统和非量测型面阵CCD数码相机,以及地面站、远程无线通信装置、地面数据处理系统等辅助设施。
1.无人机飞行平台
无人机飞行平台主要包含固定翼无人机、旋翼轻型无人机和无人飞艇。由于固定翼无人机具有低成本,可实现低速平稳飞行等优点,本研究采用固定翼无人机平台,该平台主要参数见表1。
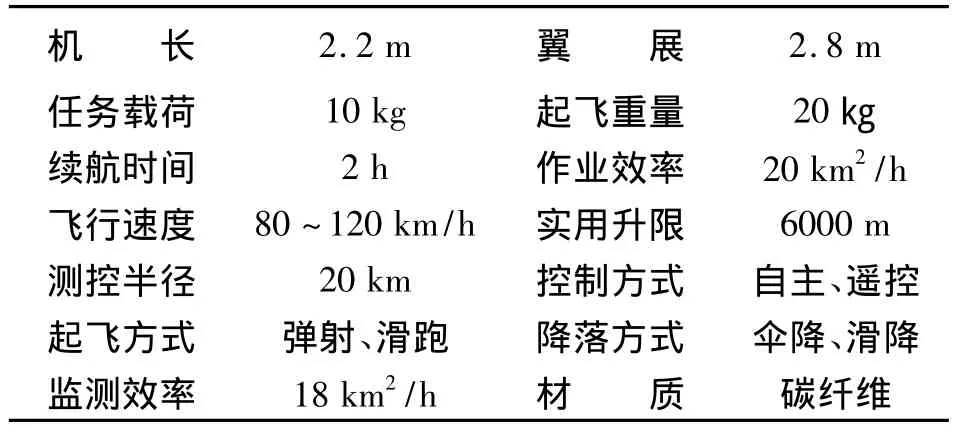
表1 平台主要参数
2.飞行控制系统
飞行控制系统用于飞行控制及任务设备管理,由自驾仪、姿态陀螺、GPS定位装置、无线电遥控系统等组成,可实现飞机姿态、航高、速度、航向的控制及各个参数的传输,以便于地面人员实时掌控飞行情况。本研究中使用UP30型无人机飞控导航系统。
3.摄影传感器
本研究中搭载传感器为EOS 5D MarkII,镜头标称焦距有24 mm、35 mm两种;CMOS传感器尺寸:36 mm×24 mm,最大像素:6048像素×4032像素。飞行过程中采取飞控系统控制快门定点曝光,将对焦环固定在无穷远处锁定相机的内方位元素,采用固定光圈以保证统一物镜畸变参数,并伴有二轴稳定云台。
4.地面控制系统
地面控制系统的功能包括:航摄前期主要有测区查询、航线设计及参数设置;飞行阶段实时显示飞行参数,辅助飞控人员进行飞行;后期统计输出导航文件、影像飞行质量快速检查等。
三、无人机航摄系统在长距离输气管道测量中的应用
某煤制气支干线全长113 km,测区地势东北高西南低,地质构造较为复杂。其中,山区约占70%,平原约20%,丘陵10%。因管道施工设计需求,需在20个工作日内提供全线1∶2000带状地形图(沿中线两侧各100 m范围)。为保证工期与质量,决定采用无人机航摄技术,技术流程如图2所示。
1.无人机航摄数据获取
(1)测区相关资料的收集
在飞行设计之前对测区概况进行了解并收集相关资料,如测区地形图、GPS控制点坐标等。
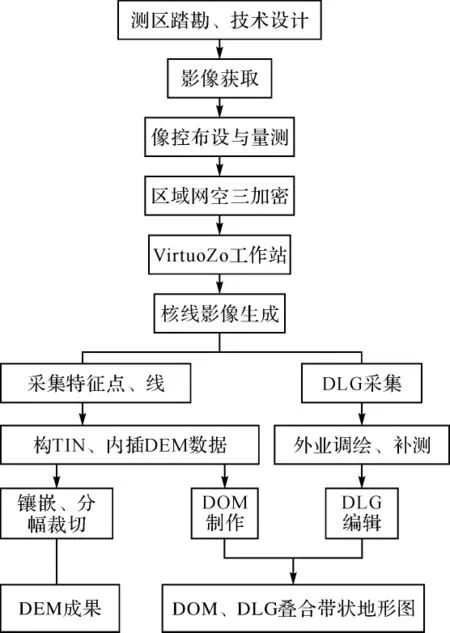
图2 无人机航测技术流程
(2)飞行设计
根据工程项目的成图要求及测区地形起伏状况,本试验设计5个航摄架次,航高依分区海拔高度设置为600~1200 m,地面分辨率优于0.2 m,带宽1 km。
(3)数据采集
将规划好的航线载入飞行控制系统,地面控制子系统按照规划航线控制无人机飞行,飞控系统则按预设的航线和拍摄方式控制相机进行拍摄。
本试验共获取影像3500张,采用人工选取同名点的方法计算相邻像片的重叠度和旋偏角,利用飞控数据和导航数据来检查航线的弯曲度、同一航线的航高差等参数[5],经检查均达到规范要求(如图3所示)。
2.像控布设及施测
根据“条带”状测区特点,全区采用平高区域网单航带双模型[6]布点方案。每隔5条基线布一对平高点,不规则区域网在凹拐角处加布平高点。全线共布设外业像控点408个。
3.影像处理
影像处理主要包括畸变差纠正、空中三角测量、三维产品制作及精度检查等内容。
(1)影像畸变差纠正
由于低空无人机的载重及体积原因,搭载传感器为非量测型相机,感光单元的非正方形因子和非正交性,以及物镜组的径向和切向畸变差的存在使得获取的数码影像存在各种畸变差,不能直接用于测绘生产[7]。本试验中航飞前在专业检校场对相机进行精检校,获取相机畸变差系数,借助Pixel Grid畸变纠正模块完成数据预处理。

图3 影像重叠度显示
(2)空中三角测量
空中三角测量是数据处理的核心,主要作业方法为根据POS数据自动建立航带内和航带间的拓扑关系网进行全自动连接点提取,通过大量平差点和快速平差算法完全剔除粗差点,利用控制点作空中三角测量计算,获取精确的外方位元素[8],生成加密点坐标。本项目丘陵地区空三加密成果精度见表2。
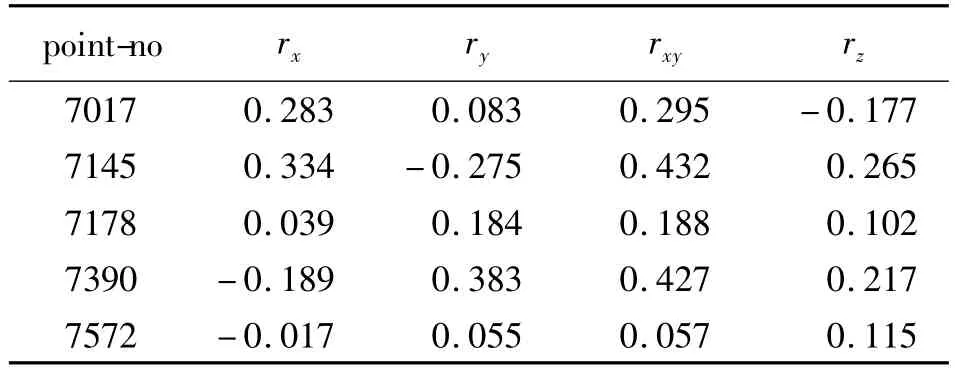
表2 检查点精度表 m
以丘陵地形为参照,表2所列多余控制点平面与高程残差最大差值均小于丘陵地限差(平面0.5 m,高程0.4 m)要求。
(3)DOM、DEM、DLG 制作
在VZ站下导入空三成果恢复立体模型,生成核线影像文件,进行影像匹配、编辑,线划图采集。根据外业调绘片在CASS环境下进行属性编辑、图廓整饰。利用采集的三维DLG数据内插生成DEM数据,从而进行DOM的制作。将正射影像图与线划图叠加分幅整饰最终完成线路1∶2000带状地形图制作,如图4、图5所示。
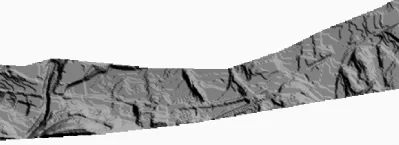
图4 DEM成果
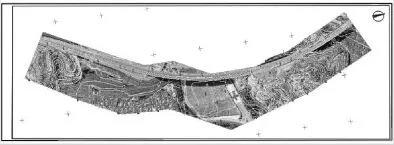
图5 DLG和DOM叠加带状地形图
(4)DLG成图精度分析
精度评定包含地理精度和数学精度评定两方面。地理精度评定采取外业巡视的方法对图面地理要素的正确性及数据完整性、综合取舍的合理性、接边质量等进行检查;数学精度评定包括平面位置评定和高程评定,主要采用RTK实测地物点,并对比图上坐标,计算较差,利用点位中误差公式计算出各个检查点的平面位置中误差和高程中误差。
在保证精度评定基础上,全区以地貌差异为划分单元,选取11个检查样本区(平原4个,丘陵3个,山区6个)。本试验采取地理精度、数学精度同步检查方式,在对地物特征点进行坐标数据采集的同时,根据现场地物实际情况检查图面信息,并保证每个样本区均匀抽取30个检测点以上,如图6所示。
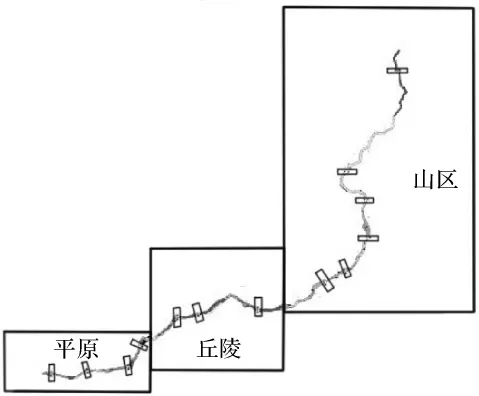
图6 精度抽检样本区
由于不同地形地貌对高程精度影响较大,因此高程精度统计采取分区域形式,平面精度采用全线综合统计。中误差采用高精度检测公式[9],即
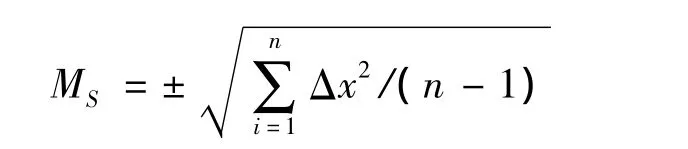
各样本区高程中误差见表3。
为了更好地验证平面位置精度,避免实测点位过程中选取点位与图上点位人为误差的存在,平面精度在各样本区外业实测点中均匀选取100个房角、公路拐角、独立地物作为检查点,精度检查结果见表4。

表3 高程精度检查表 m
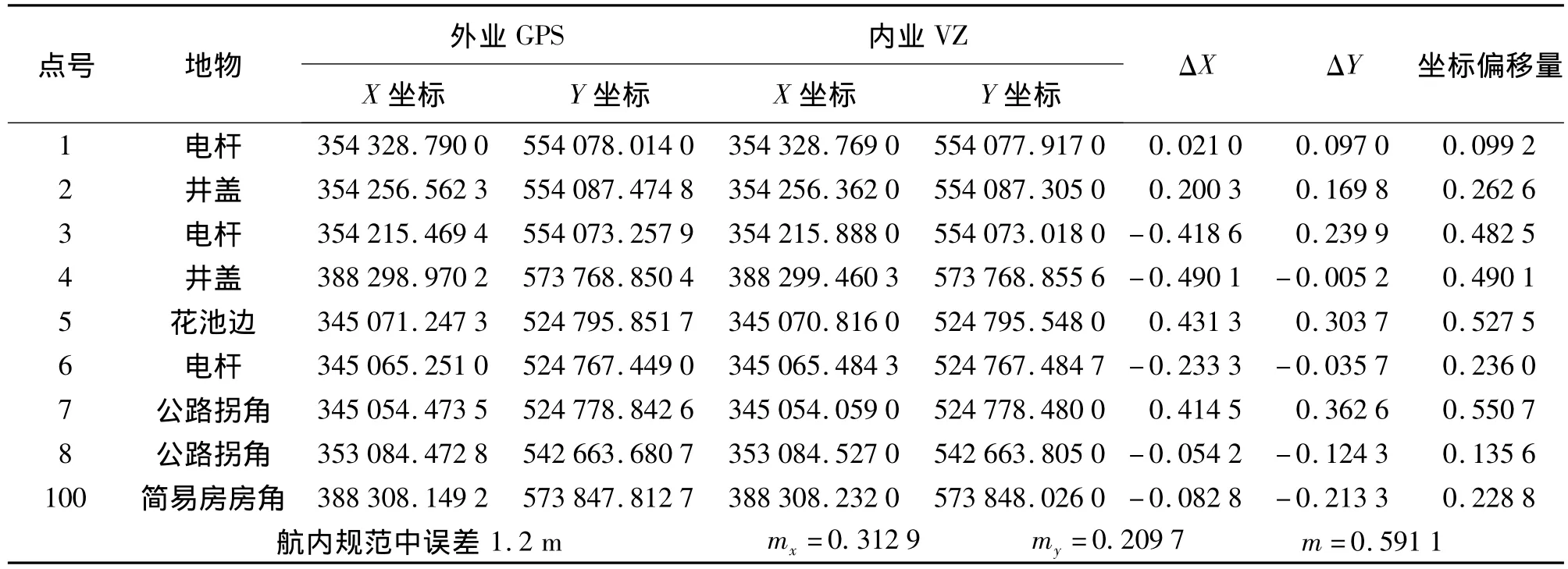
表4 平面精度检查表m
分析表3、表4数据可知,基于无人机航摄技术的1∶2000线路带状地形图高程、平面中误差均满足《1∶500、1∶1000、1∶2000 地形图航空摄影测量内业规范》(GB/T 7930—2008)要求。其中,高程精度随地形变化差异较大,地形略有起伏的丘陵地带精度最优,平面精度总体保持良好。分析误差产生的原因:从无人机自身考虑,机身姿态不稳定、传感器采用非量测型相机对高程精度影响较大;从作业过程来看,内业空三加密、立体测图等环节产生的误差,以及外业GPS实测像控点、检查点产生的误差都造成了高程、平面精度的损失。
通过与实地地物特性现场对比、量测可知,图面内容表达清晰,地物地貌取舍合理,均符合《1∶500 1∶1000 1∶2000 地形图图式》(GB/T 7929—1995)规范要求。其中,通信线、电力线走向粗差率较高,经分析得知原因为内业采集无法完全识别电杆位置,外业调绘存在误差所致。
四、结束语
低空无人机具有轻便灵活、反应迅速、成本低廉等诸多优点,本文将该技术应用于“条带状”工程——长距离输气管道线路带状地形图测量中,经试验验证,该技术在“短、平、快”的长距离输油气管道带状地形图测量中优势明显,可以高效、快速、保质地完成测量工作,极大地节省了人力,缩短了测量周期。
需要指出的是,低空无人机航摄系统自身仍存在诸多缺陷,如采用小幅面的非量测型相机,单幅影像覆盖面积小,正射影像图接缝工作量变大;像对模型变多,增加了模型切换和模型接边工作量;系统姿态不稳定、基高比[10]变小,使得空中三角形不稳定,从而引起高程精度损失,使得其在线路的穿越、站址处的大比例尺(1∶1000、1∶500)测图无法满足高程精度要求。
因此,后续工作中将主要研究利用外业实测高程点对低空摄影测量高程数据进行拟合修正,并根据拟合精度情况考虑是否可以将无人机航测技术应用于线路站址、穿越处大比例尺测图生产,以进一步发展无人机航摄技术在长距离输油气管道中的应用。
[1] 张永军.无人驾驶飞艇低空遥感影像的几何处理[J].武汉大学学报:信息科学版,2009,34(3):284-288.
[2] 鲁恒,李永树,李何超,等.无人机影像数字处理及在地震灾区重建中的应用[J].西南交通大学学报,2010,45(4):533-538.
[3] 赵永明.无人机航摄系统在长距离输油(气)管道测量中的应用探讨[J].矿山测量,2011(1):12-15.
[4] COLOMINA I,AIGNER E,AGEA A,et al.The uVISION Project for Helicopter-UAV Photogrammetry and Remotesensing[C]∥Proceedings of the 7th Geomatic Week.Barcelona,Spain:[s.n.],2007.
[5] 胡开全,张俊前.固定翼无人机低空遥感系统在山地区域影像获取研究[J].北京测绘,2011(3):35-37.
[6] 国家测绘局.CH/Z 3004—2010低空数字航空摄影测量外业规范[S].北京:中国标准出版社,2010.
[7] SU J B.Camera Calibration Based on Receptive Fields[J].Pattern Recognition,2007,40(10):2837-2845.
[8] 李永树.基于无人机技术的地形图测绘研究[J].测绘,2011,34(4):147-151.
[9] 卢金芳,薛正义.浅谈1:500航测成图的数学精度[J].测绘通报,2005(2):14-16.
[10] 王志豪,刘萍.无人机航摄系统大比例尺测图试验分析[J].测绘通报,2011(7):18-20.
猜你喜欢
西部交通科技(2021年9期)2021-01-11
当代陕西(2020年23期)2021-01-07
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
北京航空航天大学学报(2017年9期)2017-12-18
南方文学(2016年3期)2016-06-12
中国房地产业(2016年8期)2016-03-01
中国房地产业(2016年2期)2016-03-01
安徽地质(2016年4期)2016-02-27
兵器知识(2016年2期)2016-01-29
