一种新型岸基对海监视雷达海杂波抑制方法
2013-06-05 13:29邱德厚
火控雷达技术 2013年1期
邱德厚
(中国电子科技集团公司第38研究所 合肥 230031)
1 引言
岸基对海监视雷达是现代海岸与海上防御作战系统的主要组成部分,是海战场情报信息的重要来源,通常担负海面及低空监视,完成海面目标搜索、跟踪以及导航任务。岸基对海监视雷达通常部署在海岸高山、海上海岛以及海上平台等,工作环境条件恶劣,面对固定海岛杂波、运动海杂波、海上气象杂波以及其他有源电磁干扰等,需要系统具有良好的对抗各种杂波干扰性能,实现海面及低空目标检测。新型岸基对海监视雷达具备先进的技术体制,能够进行海空目标同时监视,满足海空一体战需求;具有优良的信号处理能力,实现强海杂波背景中有用目标的检测。本文主要论述分析了新型岸基对海监视雷达海杂波特性以及海杂波抑制方法。
2 海杂波特性
面对海洋环境,岸基雷达接收机将接收到大量的杂波,有用目标信号通常淹没于各种杂波和热噪声背景中。为了实现对目标的检测、跟踪与识别等处理,必须找到能够有效把目标信号和杂波区分开的特征量,即杂波特性分析。海杂波以其随雷达极化方式、工作频率、天线视角及海情、风向和风速等多个因素的变化而呈现明显的非平稳、非高斯性,掌握海杂波特性,建立准确的海杂波模型,设计最优检测算法,实现海杂波背景中目标检测具有重要作用[1]。本章从海杂波反射特性与面杂波幅度分布特点两方面分析了新型岸基对海监视雷达的杂波分布情况。
2.1 反射特性分析
有效检测出海面杂波背景中的目标信号,取决于雷达回波信号强度与海杂波强度的比值大小,即信杂比SCR。雷达散射截面积σ表示目标强度大小,而海杂波强度与雷达波束有效照射面积有关,相同有效照射面积情况下海杂波的大小又取决于海杂波后向散射系数σ0,其含义为单位面积的雷达散射截面积。海面受到雷达波照射后,除了产生各向散射波外,还产生镜像反射波,这种反射波是形成雷达多路径效应的主要原因[2]。为描述海面或陆地反射雷达波的情况,定义了反射系数ρ,其含义为反射波与入射波的振幅之比。
2.1.1 后向散射系数
岸基雷达海杂波后向散射系数σ0随着入射余角ψ的增大而增大,而入射余角ψ取决于雷达架设高度。后向反射系数表示如下:

式(1)中,σ0表示后向散射系数(dB);ρ表示反射系数(dB);ψ表示海面入射角度(°)。
图1为设定一定雷达架设高度的情况下,不同波段岸基对海监视雷达在不同距离处的海杂波后向散射系数情况。
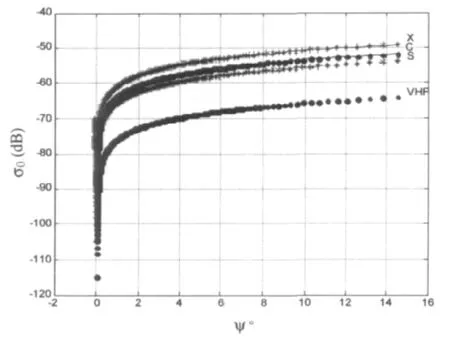
图1 不同入射余角海杂波后向散射系数
另外,不同频段雷达海杂波后向散射系数σ0随ψ变化又划分为:近切向入射区、平直区和近垂直入射区。
在近切向入射区内,σ0随着ψ的增大以及雷达波长的减小而迅速增大。
在平直区内,σ0随着ψ的增大以及雷达波长的减小而较缓慢地增大;而水平同极化的σ0要比垂直同极化的σ0受雷达波长的影响要大。
上述两个区内,σ0随海面粗糙度的增大而增大。
在近垂直入射区内,σ0随着ψ的增大以及雷达波长的减小而增加更为迅速;但σ0随海面粗糙度的增大反而趋于减小;同时,σ0与雷达波长的关系不大。
2.1.2 反射系数
新型岸基对海监视雷达工作在C波段,测量精度与分辨率高;数字波束形成,分区域、分能量覆盖探测范围;分布式有源阵列,通道瞬时动态大。由以上雷达技术特点,分析不同海情下该雷达海杂波幅度分布特点,海杂波反射系数

式(2)中,ρ表示反射系数(dB);KB表示海面蒲福风级;ψ表示海面入射角度(°);λ表示雷达波长(m)。
在海上I、IV级海情情况,蒲福风级KB=2、5,对应两种海态下的海杂波反射系数如图2所示。

图2 不同海情海杂波反射系数
2.2 幅度分布特点
海杂波幅度分布的典型模型有瑞利分布(Rayleigh)、对数正态分布(Lognormal)、韦布尔分布(Weibull)、K分布、α稳定分布等,通过更准确地模拟海杂波的分布可以更好提高目标检测精度。
新型岸基对海监视雷达发射单笔形波束,接收3个对海笔形波束,降低了杂波单元反射面积,提高了信杂比水平,三个接收波束杂波分布情况如图3所示。

图3 不同接收波束杂波幅度分布特点
从不同指向接收波束回波分布可以看出:近距离大入射角时,海杂波后向反射率变化剧烈,高波束杂波相比低波束杂波较大;远距离小入射角,海杂波后向反射率变化相对平缓,高波束杂波相比低波束杂波很大。根据不同波束分布特性,综合考虑对海探测时雷达阵地,选择合适的波束回波输出。
3 海杂波抑制方法
3.1 自适应门限设置
海面上舰船目标通常具有较大RCS,海面上舰船目标的检测又受到通视距离的限制,在准最佳的得、失比较中通常的方法是利用提高检测门限来改善海杂波中目标的检测效果[3]。根据海浪杂波强度在距离上的分布特点,结合海域探测区的设置,由近及远按距离段由高到低自适应调整检测门限,既可压制近距离海杂波强度,又不影响通视条件下的远距离海上目标的检测。距离上的自适应输出门限设置,使时域杂波分布得到平滑,单元平均选大输出信号损失小。
另外,海杂波功率可能会随距离的变化有非常大的起伏,这些起伏是由一些距离单元上的海面舰船目标或礁石附近海面的异常变化导致,并不反映常态海杂波的功率随距离的分布情况。
新型岸基对海监视雷达抑制时域海杂波分布分析如下:假如海杂波时域分布如图4所示,在雷达回波时域尚存在一个小目标信号和一个大目标信号,自适应分段门限控制视频回波输出,得到图5回波平滑后过门限信号输出。图5中上图为对数回波输出及分段门限设置,下图为信号与噪声差值及过门限输出。
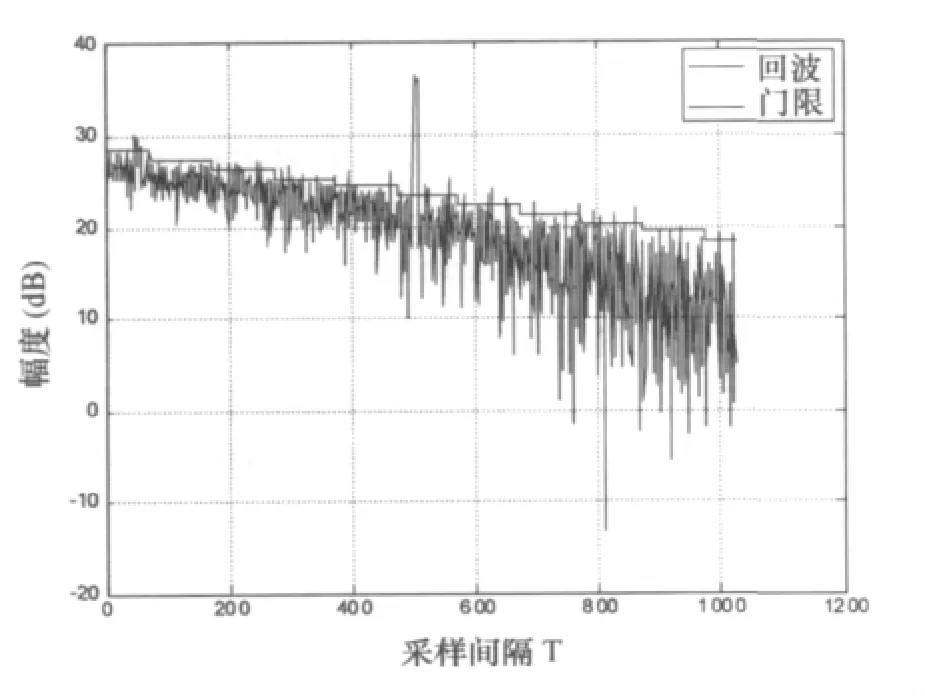
图4 对数正态杂波分布
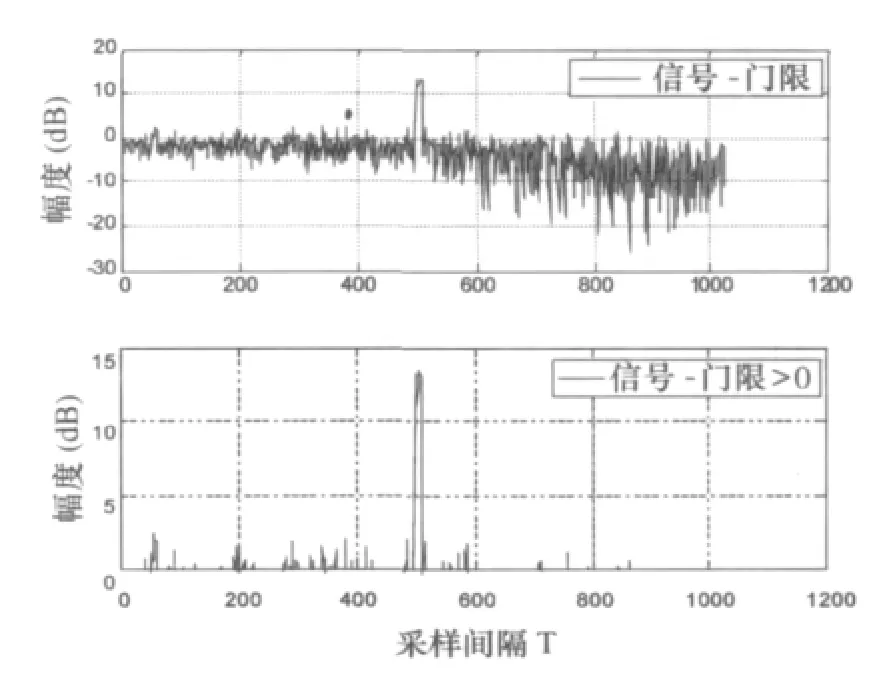
图5 过门限回波输出
3.2 脉间频率捷变
由于海面风速的影响,海杂波包括快起伏与慢起伏两个部分,频域处理难以区分海面慢动目标与海杂波,新型岸基对海监视雷达利用工作频带宽特点,采用脉间频率捷变实现快起伏海杂波去相关(即噪声化),去相关后的回波脉冲非相参视频处理,提高回波信噪比,实现有用目标的检测。
脉间频率捷变较固定频率带来的得益如下,假设海面“白帽杂波”(快起伏强相关海杂波)相关时间 τc=6ms。
一个水平波束宽度内回波脉冲数:

式(3)中Fr表示脉冲重复频率;Td表示波束驻留时间。
如果脉间固定载频时,等效的相互独立脉冲数:


则脉间固定频率时的积累增益:式(5)中L(N1)为积累损失:L(N1)=D0(N1)×N1/D0(1),D0(1)表示单脉冲信噪比。
如果脉间频率捷变时,等效的相互独立脉冲数:

则脉间频率捷变时的积累增益:

式(7)中L(N2)为积累损失,L(N2)=D0(N2)×N2/D0(1);D0(1)表示单脉冲检测信噪比。
3.3 宽带信号检测
对海探测时,面分布海杂波反射强度取决于后向反射面积σC。海杂波空间后向反射面积σC与雷达天线波束有效照射面积成正比,即由雷达水平波束宽度θh、作用距离R、距离分辨单元τ以及天线波束擦地角 φ决定。具体如公式:σC=σ0RθhCτsec(φ)/2,σ0为海杂波后向反射率。

宽带信号检测能够大大增强对海尖峰杂波中的小目标检测能力。
3.4 非相参视频积累
新型岸基对海监视雷达脉间频率捷变工作实现快起伏海杂波去相关,脉冲间回波信号不具有相参性,通过脉间非相参积累提高系统信噪比,满足海杂波背景中目标检测需要[4]。非相参积累图示如6所示。
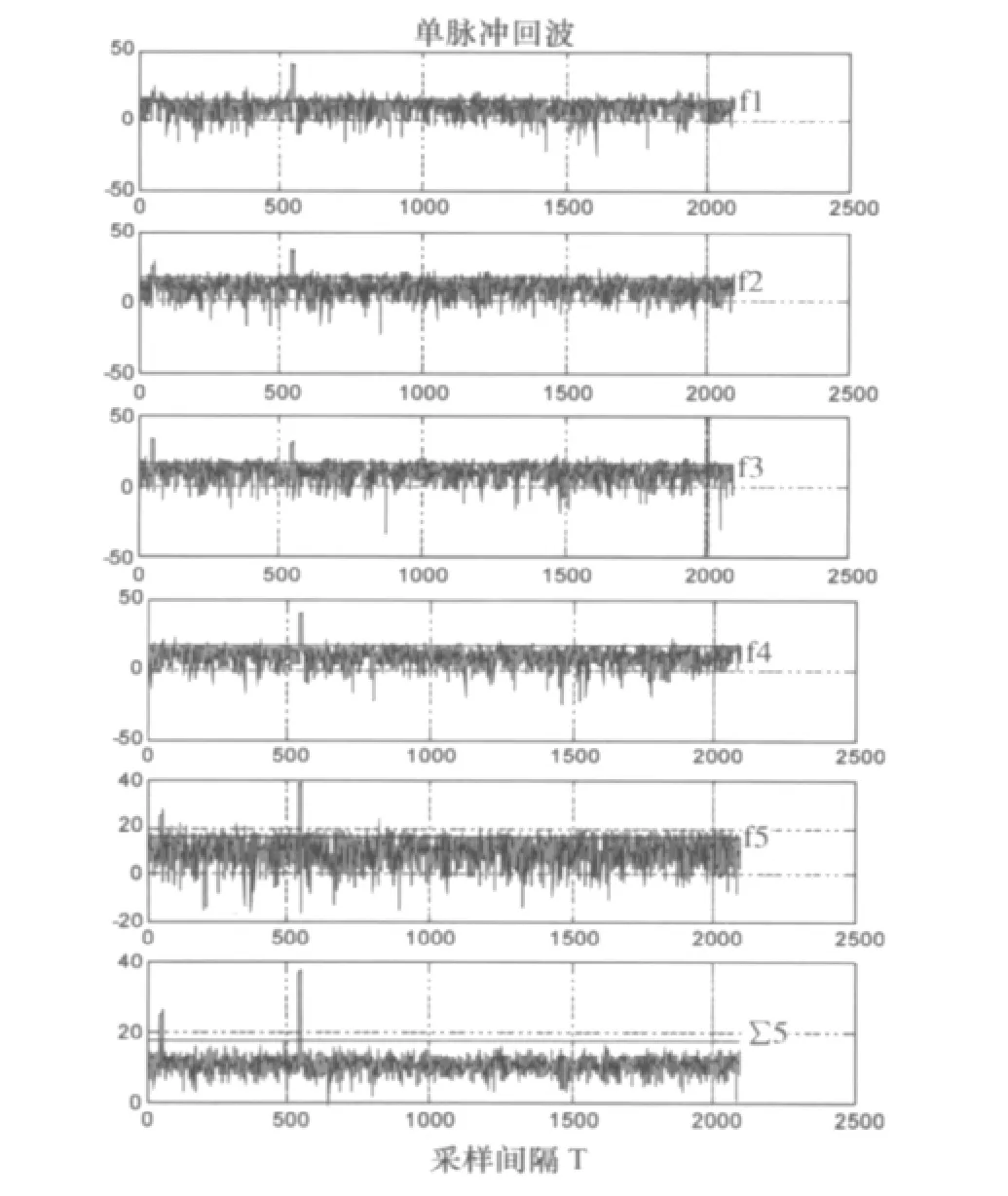
图6 五脉冲非相参积累
在不同载频脉冲回波第51至60个距离单元,第540至550距离单元分别存在两个大小目标回波信号,背景为高斯噪声背景,固定直线表示检测门限。图6中前5个脉冲信号为不同载频单脉冲回波,第6个脉冲为5脉冲非相参积累信号。
从上图可以看出,积累前单脉冲信号幅度具有起伏性,只有高于检测门限的幅度较大的输出才能被检测到,因此相邻脉冲输出有的能被检测到,有的不能被检测到,目标回波在终端显示会明暗变化剧烈。非相参积累后的目标信号幅度与随机噪声电平均得到平滑,信噪比会有所提高,有利于有用目标信号的检测输出。
3.5 海面目标跟踪
海通道回波检测后通常会存在较多虚警,同时由于目标运动速度较慢,因此要求终端数据处理具有很强的数据相关处理与跟踪滤波能力,提高对静态存在目标的跟踪判断能力,保证输出情报信息完整性。
3.5.1 Hough变换法进行海面目标跟踪起始
基于海杂波特性和舰船目标的运动特性,拟采用Hough变换进行目标自动起始验证。
Hough变换法是通过式(8)将笛卡儿坐标系中的的观测数据(x,y)变换到参数空间(ρ,θ),

其中 θ∈[0,180°],对于一条直线上的点(xi,yi),必有两个唯一的参数ρ0和θ0满足:

由公式(9)可知,数据空间的一点经Hough变换后在参数空间上形成一条曲线。参数空间上的每一点唯一对应数据空间上的一条直线,数据空间的同一条直线上的点在参数空间应该交于一点。通过检测该交点即可确定数据空间的直线,这就是Hough变换的原理。图7给出了Hough变换的示意图。
将雷达的时间-距离平面(r,t)视为数据空间,其相应数值为雷达回波能量,运用Hough变换即可实现对目标的检测。实际检测结构中,为了便于数据处理,将数据空间和参数空间分别离散化,形成一个个方格(单元),每个方格的中心点为

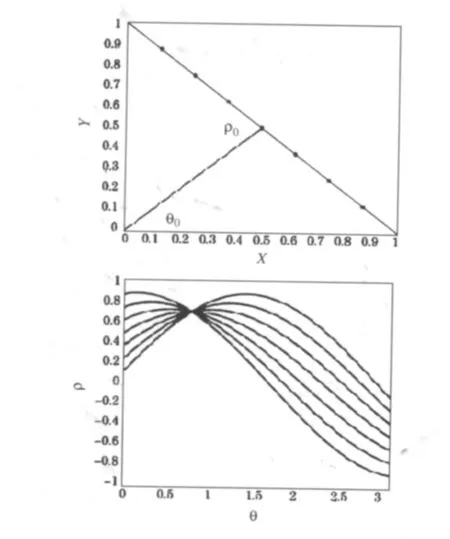
图7 Hough变换示意图
式中 δθ= π/Nθ,Nθ为参数 θ的分割段数;δρ=L/Nρ,Nρ为参数ρ的分割段数,L为雷达测量范围的两倍。基于Hough变换的检测过程如下:首先将点迹数据经Hough变换转换到参数空间;然后,对参数空间的每个方格累加通过的每一条曲线的数值(即对回波信号进行非相干积累),并与在参数空间上设置的门限进行比较,积累能量超过第二门限的方格被认为是检测点,即认为检测到了信号;最后,通过逆Hough变换,参数空间的检测点被映射回数据空间,形成时间-距离平面的目标航迹,即可实现对目标的检测起始。当存在杂波时,通过第一门限的杂波与目标信号一起经Hough变换转换到参数空间。由于杂波是随机的,而目标信号具有很强的相关性,因此,目标信号对应的Hough单元的积累值以高概率高于其它单元。综上所述,因为充分利用了信号与杂波具有不同统计特性的特点,故基于Hough变换的信号检测可以从强杂波环境中检测出目标。
3.5.2 目标停航与启航处理
海面目标与空中目标不同,海面目标在航行的过程中随时可以停止行驶并停泊在原地一段时间后重新启航行驶。数据处理软件需要对海面目标进行停航判断,主要是根据目标的航迹跟踪质量、目标运行速度进行判断;当判断目标为停泊状态后,需要保留航迹批号,进行固定点跟踪,并判断是否进行启航处理。
3.5.3 软件杂波图处理
对海监视雷达探测目标时,为保证对海面以及海杂波背景中小目标的检测性能,雷达信号处理往往降低目标检测输出门限,这样会大量增加画面虚警率,不利于目标的观测与跟踪处理。雷达数据处理终端设计软件杂波图对区域性密集分布的复杂类型杂波进行相关处理,达到控制虚警与提高目标检测跟踪性能。首先将雷达作用空域在方位、距离上按一定间隔等分成许多空间小区域,采用计算点迹密度的方法来确定哪些空间小区域属于杂波密集区域。将相邻的杂波密集区合并,得到空间杂波密集区域。对杂波密集区域内的点迹进行幅度门限检测。这种杂波图方式与信号处理处的功能类似,但是基于的数据样本不同,参考国外同类型雷达,例如法国的STER雷达,其采用对目标回波进行打分的方式进行杂波剔除。打分越高的认为是目标回波,优先采信,而打分越低的认为是杂波,予与剔除。
4 结束语
新型岸基对海监视雷达能够同时实现海面舰船目标的两维定位与空中目标的三维定位,具有较强的空海一体战能力,根据该雷达战技特点应用相应的海杂波抑制方法,更好的满足未来海战场情报信息获取的需要。
[1]欧阳文,何友,靳煜.基于统计模型的时-空相关海杂波仿真[J].系统仿真学报,2006,18(2):467-471.
[2]姚云萍,段昶,方庆.一种船用雷达的海杂波抑制算法[J].火控雷达技术,2011,40(03):32-36.
[3]吴三元,邱新军,马来群.海面RCS与雷达海上目标检测[J].火控雷达技术,2008,37(2):51-53.
[4]李宗武.直升机机载雷达抗海杂波技术研究[J].现代雷达,2000,22(1):10 -14.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
火力与指挥控制(2019年4期)2019-06-14
现代电子技术(2019年1期)2019-01-10
大陆桥视野·下(2017年5期)2017-06-19
现代防御技术(2014年6期)2014-02-28