车路协同环境下城市交通控制研究
2013-06-23 16:22杨晓光
上海理工大学学报 2013年4期
姚 佼, 杨晓光
(1.上海理工大学管理学院,上海 200093;2.同济大学交通运输工程学院,上海 200092)
车路协同环境下城市交通控制研究
姚 佼1, 杨晓光2
(1.上海理工大学管理学院,上海 200093;2.同济大学交通运输工程学院,上海 200092)
在梳理城市交通控制随交通信息进步发展脉络的基础上,结合车路协同环境下交通信息采集的特点,综述分析单点控制、协调控制的研究现状,进一步总结了车路协同环境下城市交通控制的发展机遇和挑战.指出车路协同环境下交通流演变模型、基于实时车载数据的控制策略评价,以及面向特殊模式的控制策略是车辆协同环境下城市交通控制的突破口和发展方向.
车路协同;交通控制;交通信息;车载数据;交通流
经济的高速发展,小汽车保有量的逐年剧增,使得混合交通逐渐向混乱交通演化,交通拥堵问题已成为大城市的不堪承受之苦.据测算,由于交通堵塞,整个英国每年在时间和燃料上的损失相当于国内生产总值的2%~4%[1];高度依赖小汽车的美国,每年因此导致的损失高达2 370亿美元,约占世界5%的人口消耗了世界26%的石油,且45%的贸易赤字来自于汽车和石油的进口[2];根据中国科学院研究,2010年中国百万人以上的50座主要城市,居民平均单程上班时间要用39 min,中国15座主要城市居民每天上班单程比欧洲多消耗288亿min,据此推算,每天损失近10亿元人民币[3].更为严重的是交通拥堵有进一步向中小城市快速蔓延的趋势.
交通控制作为最直观明显地调控交通流,改善其拥堵、提高其安全性乃至节能减排的极为重要的技术措施之一,受制于传统固定地点的交通状态信息采集方式,无法真正实现高效稳定地对交通流及其状态变化的实时响应与自适应优化控制,城市道路高峰时段排队溢出、绿灯空放、车辆刮擦等现象严重,交叉口运行效率低下、秩序混乱、存在诸多安全隐患[4].现状交通模式下的交通控制理论与方法已经成为城市交通发展木桶理论的“短板”,如何构筑一个高效、稳定的交通控制系统已经成为一个世界性的难题[5].
另一方面,十多年来电子信息和无线通信技术的发展,“车路协同”系统概念不断深入和完善,交通数据采集的内容也得到了进一步的丰富和改进,从传统的检测器流量、占有率等发展到车辆的位置、速度、加减速、转向等信息,可以对车辆的行驶轨迹、运行工况了如指掌;数据采集的精度也逐渐从小时量、分钟交通流量过渡到实时车辆运行状态信息.车路协同系统的出现,使得交通信息真正实现了从时间维的线采集到时间、空间两个维度上的全天候、全方位无缝覆盖的面采集,交通信息将不再成为制约交通控制发展的瓶颈[4-5].
1 城市交通控制随交通信息技术进步的发展
Webster和Cobber等根据调查的交叉口历史流量数据,提出了经典的Webster定时信号配时理论,以及稳态理论、定数理论和过渡函数曲线法等延误计算方法[6-7],并沿用至今.但F-B法的延误只能在交叉口饱和度较小的情形下才有较好的结果,相关研究表明,此法在交叉口饱和度为0.8~0.9时效益最好.澳大利亚学者Akcelik引入“停车补偿系数”,并将它与车辆延误时间合在一起,用以评价信号配时方案的优化程度,可以认为是对F-B法的一个修正和补充[7].国内上海市工程建设规范《城市道路平面交叉口规划与设计规程》[8]中提出的交通信号控制配时方法模型,虽然考虑了中国城市道路的实际需求,但是它的理论基础仍来源于F-B法. Akcelik等[7]根据检测器信号延长绿灯时间、变换信号相位,实现了感应控制,在一些交通量不大的市郊交叉口具有较好的效益.自适应控制方面,Gartner等[9]实时统计优化间隔内的检测器数据,通过时间窗内的滚动优化,初步实现了交通信号的需求响应控制,并在OPAC(optimized policies for adaptive control)系统中取得较好的控制效果.目前国际上比较流行的控制系统如SCOOT,SCATS系统根据实时检测器数据,对短期交通进行预测,对控制方案进行在线选择与微调.
随着车路协同系统的发展,交通信息的粒度逐步精细化,交通信息的采集也逐步从基于检测器发展到基于单车.国外许多学者对车路协同系统在交通控制领域的利用进行了探讨,Mohammad等[10]通过车车通信和车载辅助提示的研究认为,车路协同系统可以减少驾驶员的反应时间,并用数学解析的方法研究了车路协同对通行能力的提高,以及交通网络安全和效率的改善;弗吉尼亚大学Brian等[11]2010年开始承担的课题“IntelliDriveSMTraffic Signal Control Algorithms”利用车路协同系统获取的车载数据对交叉口过饱和排队溢出进行状态判断,并研究基于此的过饱和控制交通信号控制策略[11];美国联邦公路局(FHWA)先进研究探索计划(The exploratory advanced research program)于2007年开始资助亚利桑那大学开发下一代控制系统“Next-Generation Smart Traffic Signals”[12],其目标是在RHODES基础上运用车路协同系统的实时车载数据对交通控制参数进行在线自学习和标定,从而实现无人干预的城市道路自适应控制,即下一代车路协同环境下的自学习控制系统RHODES NG with IntelliDriveSM.
美国交通运输委员会交通信号系统分委员会(Transportation Research Board Traffic Signal Systems Committee)主席Larry,详细分析了车路协同系统环境下信号控制的假设前提、特点以及系统的输入输出,并在车路协同系统框架体系下,对车载数据的利用进行探讨,进一步归纳了控制策略的变化发展趋势与信息丰富程度之间的内在关系,并在此基础上总结得出了城市交通控制与交通信息直接的内在关系,如图1所示[13].

图1 交通控制策略与信息丰富程度的内在关系Fig.1 Relationship between development traffic control and richness of information
国内专家学者对于车路协同系统环境下交通控制的认识与国际基本同步.2010年杨晓光等开展了基于车路协同的下一代道路交叉口交通控制技术探索研究,在构建车路协同实验平台基础上,揭示了车路协同条件下交叉口实时自适应交通控制机制和交通流的基本规律[14-16].
2 车路协同环境下城市交通控制的演化
车路协同系统的出现,起初是因为安全方面的考虑,如美国的CICAS计划、日本VICS计划和Smartway计划、欧洲CVIS等[4],主要关注通过车车、车路通信,克服视觉盲区,避免交通事故,实现主动交通安全.但是随着系统的推进实施,研究人员发现车路协同系统在提高交通网络系统的运行效率方面也有明显的作用.当车辆彼此间都建立了连接,会导致驾驶员反应时间缩短,车辆间的车头时距随之缩短,道路的利用率就越高,有效的通行能力就会因此增加[10].每条车道拥有更大的通行能力意味着车道总数可以减少.此外,车路协同系统环境下,全时空车载状态数据的获取,能够大幅度提高城市道路交通状态的预测精度[4].通过实时车路通信代替传统的固定地点检测器,提高路侧信号控制机对车辆的及时响应能力,监测行驶车队状态使交通信号控制和协调更加精确[17].
具体而言,从控制的目标来看,车路协同环境下城市交通控制,从以往以车均延误和停车次数为主要指标的效率评价,向交叉口辅助驾驶的主动交通安全,以及将信息提示和交通信号控制结合的主动安全交通控制发展,最终实现以综合运行效率、安全、排放和能耗等为目标的主动交通控制.
从控制的对象来看,车路协同下城市交通控制从紧急救援、公交优先等特殊的交通模式为切入点,逐步实现对机动车流的控制.进一步通过车、路、人的通信实现慢行交通控制,综合各种交通方式,最终实现对混合交通的控制.
从控制的范围来看,车路协同下的城市交通控制从单个交叉口的车路通信适应性、信号灯状态车载显示、车载转向诱导等实验,转向路径层次协调控制的概念验证.下面以此为思路对车路协同环境下的城市交通控制演化进行分析.
2.1 单个交叉口实验平台与交通控制的概念验证
近年来,车路协同系统之所以得到长足进步和发展,主要得益于车载无线通信技术的不断成熟和发展,使得相关实验平台的建设和相关应用场景的概念测试可行.
首先,对车载专用短程通信协议(dedicated short range communications,DSRC)的测试,国际上主流研究关注DSRC在车路协同环境下车车通信典型应用场景中的适应性和可靠性.美国的VSC(vehicle safety communications)项目认为DSRC潜在的技术优势在于非常低的通信延迟以及可以进行消息的广播[18],Hao等通过通信仿真,分析了消息在车队中传播的可靠性和延迟,及其与交通密度、车队车载设备普及率等因素之间的关系[19].
其次,在系统逻辑、物理架构平台设计和搭建方面的研究,Karagiannis等对各个国家的车路协同系统框架进行了总结[20];姚佼等利用嵌入式技术,将其开发的自适应交通控制算法植入信号控制机[21],构建了基于全息信息的车路协同系统[14,22];Yang等在此基础上,对实验平台进行了进一步的完善,将车车通信协议更新为WAVE(wireless access for vehicular environments)[23].
最后,在构建车路协同通信原型系统,进行相关应用场景的概念验证方面,美国联邦公路局的研究报告“Vehicle Infrastructure Integration(VII)Signal Timing Optimization POC Application Requirements”中明确对车路协同环境下信号配时优化的边界定义,并给出了概念设计的逻辑框架图,在此基础上对相应的系统假设条件、功能需求、期望评价指标、外部接口等进行了规范说明;进一步在其指导下在旧金山湾、密歇根州、亚利桑那州的实验平台上分别对互联网信息发布、信号优化和匝道控制、快速路事故响应和交叉口信号优先等场景进行了概念测试[18].
我国国家863计划也在2010年设立了车路协同专项课题,即现代交通技术领域智能车路协同关键技术,清华大学、同济大学、北京航空航天大学、北京交通大学、武汉理工大学等科研单位在车路协同设计、协同控制、集成、互动式安全、仿真测试等领域已开始概念验证,如杨晓光、朱彤、姚佼等在同济大学嘉定校区建立了车路协同环境下全息信息实验平台,并完成了交叉口信号灯状态车载显示的场景测试[14,22].
2.2 协调控制的仿真与概念验证
车路协同利用车车、车路通信,可加强与路侧信号控制单元间的联系,以及实时交通状态对其的决策支持.弗吉尼亚大学Brian等对车路协同环境下路段车队的离散和聚类进行了分析,并针对具体的过饱和场景,通过车载数据的排队检测,研究上下游交叉口的协调控制.仿真结果显示,对于交叉口过饱和的排队溢出,通过交叉口间信号控制机的实时状态检测及交互,能在通行能力较小减幅的情况下,对过饱和交通状态及时解锁.大幅降低车均延误、停车次数等[11].
实地测试方面,美国密歇根州交通部在底特律郊区的法明顿希尔斯(Farmington Hills)城市主干路上5个路口通过布设路边设施点(如图2所示),完成了车路协同系统相关功能的集成、以及此环境下交通信号协同控制具体应用场景目标、假设和约束条件、控制方案的生成流程和评价指标等的测试[13,24].同济大学在校园实验平台的基础上,通过车辆与路侧单元的通讯,实现交叉口间信号的协调控制,可用于特殊车辆的优先通行,并在江苏省太仓市进行了中国典型城市道路车路协同实证研究——以江苏省太仓市为例的试验(如图3所示),对紧急救援交通的换道辅助、无信号交叉口冲突避免、优先控制等场景进行了概念验证,社会反应良好[25-26].

图2 美国密歇根实际道路车路协同概念验证实验平台Fig.2 Proof of concept platform of VII at urban area in Michigan,US

图3 中国典型城市道路车路协同实证研究示意图Fig.3 Diagram of field test of VII on Chinese typical urban road
3 车路协同环境下城市交通控制的机遇与挑战
车路协同系统环境下,首先,信息采集方式逐步由粗放型的政府大规模基础设施投资(检测线圈、视频监控、标志标线铺设),转为更为集约型的基于车载单元的分布式交通信息无线采集,交通数据信息采集系统建设和运营维护成本大大降低,有利于大规模的推广与实施;其次,通过车车、车路通信,能够采集到全时空车载信息,克服了传统控制算法因传统检测器只能采集特定地点或信号控制交叉口附近的交通数据、无法获取路段出入以及交叉口转向交通需求、无法及时预测交叉口车队到达的需求等缺点,能够为控制策略提供更为精确的输入;此外,还可以从车载数据中获取实时延误、停车次数、油耗等指标,作为评价交通控制效益的真实值,更客观公正地反映实际交通控制状况,克服了传统交通控制评价模型适用范围和可靠性有限、存在参数标定繁琐且无规律可循等缺点;再次,车载信息在车车、车路之间的流动,对驾驶员行为、道路交通流的作用机理,使驾驶员反应特性、车头时距、车辆跟驰、换道特性都将发生本质性的变化(如图4所示)[4],既对传统交通流、交通控制理论带来了严峻的挑战和重大变革,也蕴含着创新发展的机遇;此外,通过车车、车路通信,交通参与者、交通工具、交通设施与交通环境之间的有机结合,能够缩短驾驶员反应时间[10],减少了车辆间距,在能给出两难区、闯红灯、左转非控、主路让行、机动车右转提示等车载信息提示、改善交通安全的同时,缩短了绿灯损失时间,有效提高信号控制的效率,同时对于城市公共交通、应急交通、VIP车辆等特殊交通也能做到及时响应;更为重要的是,系统数据采集粒度、精度的提高,使交通管理控制与车辆控制、与交通诱导的整合亦成为可能,能够显著提高城市交通管理的智能化水平.
著名学者Michael认为,当前条件下仅仅依靠交通信号本身已经不能够解决日益严重的交通拥堵问题,与车路协同系统的集成及整合将是城市交通控制发展的必然趋势[27].
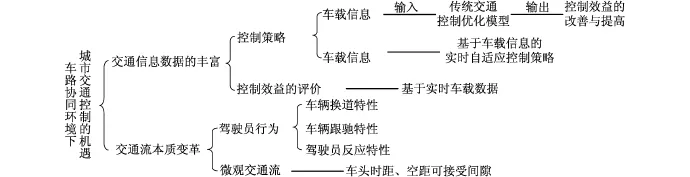
图4 车路协同环境下城市交通控制的机遇Fig.4 Opportunity of urban traffic control under VII
4 未来发展和研究方向
车路协同是交通系统智能化发展的趋势,必然会带来交通领域的一场变革.传统交通控制虽然取得了诸多有意义的成果,但受制于传统交通信息采集方式、存在交通预测的准确性不高、对网络交通状态响应的及时性不高、交通预测和估计准确性不够、无较好的相位顺序优化方法及缺乏自校正过程等固有缺陷.车路协同的出现,为其中一些基础理论问题的深入研究和突破提供了良好的平台条件,其应用前景光明.虽然国内外学者在实验平台、概念验证、应用前景等方面进行了有益的探索和尝试,取得了一定的成果,但仍有诸多问题需要在未来的研究中重点关注.
a.车路协同环境下交通流演变模型研究.车路协同环境下车车、车路通信的信息发布、提示和相互作用,都将使得驾驶员的跟驰、变道、反应时间等微观交通流特性发生变化,相关交通参数和特性等都将随之而变,如何利用全时空车载数据对其进行重新解析和研究,为制定新的交通控制策略提供依据[28],是后续研究的重点.
b.基于实时车载数据的控制策略评价的实时性和多目标优化.利用车路通信实时分析车载数据,使交通控制策略的评价摆脱了传统模型的种种缺陷,从集计的车均延误、停车次数、油耗等向个体车辆在交叉口的实时控制延误、排队延误、启动损失时间、转向次数、潜在冲突、陷入两难区次数等更加实时具体、客观公正;通过数据挖掘,将主动交通安全、交通控制以及车辆的能源消耗排放等目标加以综合考虑,逐步实现实时多目标优化.美国交通运输委员会交通信号分委员会2005年的一项专家投票中,此方面的研究位居交通控制领域未来主要研究方向的第二位[29],需要对此进行深入探究.
c.面向特殊模式的交通控制研究.车路协同系统在交通控制领域的研究从概念提出走向具体应用,需要寻找一个功能结构相对简单的模式作为突破和典型示范,如紧急救援、VIP、公交优先等特殊交通方式的控制问题[30].进而拓展到自行车、行人等慢行交通,再通过与常规交通的整合,实现交通系统的多模式协同控制,使车路协同环境下的交通控制更符合我国城市道路交通的特点,更具有中国特色.
d.车路协同系统特性对交通控制的影响.车路协同系统中路侧单元的空间布局、通信方式、车载数据的内容、生成频率等时间特性以及车载设备的普及率等空间特性,都会对此环境下交通控制的效益产生显著影响,未来需要对这一方向进行深入探索[4,19].此外,车路协同系统如何与现有的多种交通信息采集方式整合,进行交通控制,亦是一个值得关注的研究领域.
e.车路协同环境下交通控制与诱导的整合.基于车路协同环境进行交通控制可以说已经是将交通控制的能力几乎发挥到了极限,下一步应该考虑如何实现与交通诱导、管理的有效整合[31-32],实现多功能的车路协同,从更大层次上提高整个交通系统的运行效率.
5 结 语
2006年时任美国运输部部长的Peters指出:需要寻找21世纪交通问题的21世纪答案,不能假设以前的方法以后仍然可以适用;相反,应该认识到从交通这个研究领域形成开始,在过去的40年里,交通系统和环境发生了显著变化,其所面临的挑战亦发生了深刻的变化,应该寻找新的解决问题的办法.正如爱因斯坦所言:今天遇到的问题不能用提出问题时的思想来解决.城市交通控制的改善与提高亦应该打破传统的观念,它应该包括交通设施以及交通工具的控制,以及两者之间的交互.研究车路协同环境下城市交通控制,不仅对于拓展交通控制的新领域、发展信息环境下的下一代城市交通控制系统具有重要的理论价值,而且对于进一步提高城市道路交叉口运行的安全性和效率性,提高交通管理与控制的主动性,预防与快速排解交通拥堵等亦具有重要的应用价值.
[1] 周家高.伦敦如何解决城市交通拥堵[J].交通企业管理,2006,21(2):63-64.
[2] David S,Bill E,Tim L.TTI’s 2012 urban mobility report[R].College Station:Texas A&M Transportation Institute,2012:24-31.
[3] 耿慧丽.每天损失10亿——中科院专家称我国城市交通拥堵造成巨大经济损失[EB/OL].http:∥www. eeo.com.cn/industry/real_estate/2010/10/09/182244.shtml,2010.10.09.
[4] 姚佼.基于车辆行驶数据的交叉口交通控制机制研究[D].上海:同济大学,2011.
[5] Yao J,Yang X G,Wu D,et al.Urban traffic control tentative exploration in vehicle-infrastructure integration environment[C]∥The 3rd IEEE International Conference on Intelligent Computation Technology and Automation.Changsha,2010.
[6] 杨佩昆,吴兵.交通管理与控制[M].北京:人民交通出版社,2003.
[7] 全永燊.城市交通控制[M].北京:人民交通出版社,1989.
[8] 栗红强.城市交通控制信号配时参数优化方法研究[D].长春:吉林大学,2004.
[9] Gartner N,Kaltenbach M.Demand-responsive decentralized urban traffic control:Part I:singleintersection policies[R].DOT/RSPA/DPB-50181124,Washington D.C.:FHWA,1983:37-59.
[10] Mohammad N,Hossein P.The effect of VII market penetration on safety and efficiency of transportation networks[C]∥Proceedings of International Conference on Communications Workshops.Dresden:IEEE,2009.
[11] Brian S,Ramkumar V,Hyungjun P.IntelliDrive traffic signal control algorithms[R].Charlottes Ville:University of Virginia,2011.
[12] FHWA.The exploratory advanced research program fact sheet:next-generation smart traffic signals RHODESNGwith IntellidriveSM—the self-taught traffic control system[EB/OL].http:∥ntl.bts.gov/lib/31000/31400/31409/FHWA -HRT-09-063.pdf,2009.
[13] Larry Head.Traffic control in a VII environment[Z]. Washington D.C.:TRB Traffic Signal Systems Committee,2008.
[14] Yang X G,Yao J,Zhu T,et al.Vehicle infrastructure integration experimental platform based on holographic information[C]∥16th World Congress on Intelligent Transportation Systems,Stockholm,2009.
[15] Yao J,Yang X G,Zhu T,et al.Chinese driver behavior characteristics research at intersection based on intelligent vehicle-infrastructure integration experimental platform[C]∥The 2ndIEEE International Conference on Intelligent Computation Technology and Automation. Zhangjiajie:IEEE,2009.
[16] Yao J,Yang X G,Wu D,et al.Architecture of urban traffic control at intersection in vehicle infrastructure integration environment[C]∥Proceedings of the 2010 International Conference of Logistics Engineering and Management.Chengdu:IEEE,2010.
[17] Booz A H.Vehicle infrastructure integration(VII)proof-of-concept(POC)test—an overview[C]∥2008 ITS VA Annual Conference.Charlottes Ville,2008.
[18] Booz A H.Vehicle infrastructure integration(VII)POC applications concept of operations(version 1.4)[R].Washington D C:U S Department of Transportation Federal Highway Administration,2007:119-135.
[19] Hao W,Jaesup L,Michael H.Efficiency of simulated vehicle-to-vehicle message propagation in Atlanta,Georgia,I-75 corridor[J].Transportation Research Record,2005,1910(1):82-89.
[20] Karagiannis G,Altintas O,Ekici E.Vehicular networking:a survey and tutorial on requirements,architectures,challenges,standards and solutions[J]. IEEE Communications Surveys&Tutorials,2011,13(4):584-616.
[21] 姚佼,时柏营,马万经.嵌入式单点自适应信号控制系统软件设计[J].交通与计算机,2008,26(5):127 -130.
[22] 姚佼,杨晓光,朱彤,等.基于全息信息环境的车路协调系统试验平台[J].公路交通科技,2009,26(S1):39 -43.
[23] Yang X G,Huang L Y,Wang Y S.A prototype of a cooperative vehicle infrastructure system:proof of concept--case study in tongji university[C]∥91th Transportation Research Annual Meeting.Washington D.C.:ASCE Publications,2012.
[24] Hamilton B A.Vehicle infrastructure integration(VII)signal timing optimization POC application requirements[R].Washington D.C.:Research and Innovative Technology Administration,2007:2-6.
[25] 樊丽萍.帮救护车提速“车联网”露了一手[EB/OL]. http:∥whb.eastday.com/eastday/whsd/w/20110514/u1a882185.html,2011-5-14.
[26] 周羽.电装开始在中国进行车路协同验证实验[EB/OL].http:∥news.xinhuanet.com/auto/2012-03/29/c_122906456.htm,2012-03-29.
[27] Michael B.Future directions in traffic signal control[J].Transportation Research Part A,1992,26(4):303 -313.
[28] 孙晓燕,汪秉宏.考虑车辆间博弈行为的交通量[J].上海理工大学学报,2012,34(1):14-17.
[29] Traffic Signal Systems Committee.Research problem statement titles-ranked[EB/OL].http:∥www. signalsystems.org.vt.edu/documents/project_ statements/tss_problem_statements_7-13-05Ranked_10-11-05clnup.pdf,2005.
[30] 黄玮.城市道路应急车辆信号优先控制策略[D].上海:同济大学,2010.
[31] 保丽霞.基于信息集成的城市交通流诱导与交通控制协同的关键理论及技术研究[D].长春:吉林大学,2006.
[32] 马寿峰,李艳君,贺国光.城市交通控制与诱导协调模式的系统分析[J].管理科学学报,2003,6(3):71 -78.
(编辑:金 虹)
Urban Traf fic Control Under the Environmenr of Vehicle Infrastructure Integration
YAOJiao1, YANGXiao-guang2
(1.Business School,University of Shanghai for Science and Technology,Shanghai,20093,China;2.School of Traffic and Transportation Engineering,Tongji University,Shanghai,200092,China)
Based on the summary of research context of synchronization development between traffic control and information technology,the urban traffic signal control at isolated intersections and arterial streets under the environment of VII(Uehicle infrastructure integration)was analysed,taking the characteristic of traffic information collection under VII into account. Moreover,the challenge and opportunity of traffic control under VII was also illustrated.It is concluded that the future research on traffic control under VII should focus on evolved traffic flow model,probe data based MOE(measurement of effectiveness)of signal control strategy in real time and specific modes oriented signal control strategy.
vehicle infrastructure integration;traffic control;traffic information;probe data;traffic flow
U 491.2+3
A
1007-6735(2013)04-0397-07
2012-09-14
国家自然科学基金资助项目(60974093);上海高校青年教师培养资助计划(slg12009);同济大学道路与交通工程教育部重点实验室开放基金资助项目(201107)
姚 佼(1982-),男,讲师.研究方向:车路协同系统、智能交通控制.E-mail:yaojiao@126.com
猜你喜欢
中国交通信息化(2021年12期)2021-02-12
汽车观察(2019年2期)2019-03-15
上海公路(2018年1期)2018-06-26
中国交通信息化(2018年12期)2018-03-21
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
工程建设与设计(2016年8期)2016-03-11
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
城市轨道交通(2014年2期)2014-03-20
河南科技(2014年19期)2014-02-27