
简化的鲁棒自适应自动舵控制算法设计
2013-06-27 05:45孙红英
船电技术 2013年3期
孙红英
( 青岛远洋船员职业学院,山东青岛 266071 )
简化的鲁棒自适应自动舵控制算法设计
孙红英
( 青岛远洋船员职业学院,山东青岛 266071 )
为研究船舶航向非线性系统的自适应跟踪控制问题,在考虑舵机伺服系统特性的情况下,提出一种简化的鲁棒自适应神经网络动态面控制算法。采用RBF神经网络逼近模型不确定性,简化自适应参数调整方法,解决了动态面控制自适应参数过多的问题。该算法设计的控制器复杂性低且只有1个在线调整自适应参数,易于工程实现。该算法可以保证闭环信号的渐近稳定,使航向跟踪误差任意小。仿真结果验证了控制器的有效性。
自动舵 神经网络 动态面控制 反步法 参数不确定
0 引言
近年来,随着航运业的发展,对船舶航行的安全性、节能、降低船员的劳动强度的要求日益增强,船舶航向控制问题得到了大家的关注。由于船舶的动态具有大惯性、大时滞、非线性等特点;航速、装载及外界干扰的变化使船舶航向控制成为一个复杂的非线性控制问题。反步法,是非线性控制系统设计中广泛使用的一种方法,所设计的控制器不仅具有鲁棒性而且降低了控制的难度和能量,在船舶航向控制中取得了较好的控制效果[1-3]。文献[4]针对参数不确定的船舶航向保持非线性控制问题,提出将反步法与Nussbaum增益方法相结合,解决了非线性控制系统控制方向未知的问题。文献将神经网络、L2 增益与反步法结合,对建模误差用在线神经网络予以辨识和补偿,取得了较好的控制效果。然而,上述控制器需要对大量的自适应参数进行在线调整,反步法的设计使控制律存在计算膨胀问题,在线执行耗时明显而限制了其在工程实践中的应用。因此,研发易于工程实现的航向控制器控制算法是目前船舶控制领域的一个研究热点。
本文在考虑舵机伺服系统特性的情况下,提出一种简化的鲁棒自适应动态面控制算法。系统的不确定性由RBF神经网络在线逼近,在线调整自适应参数只有1个,DSC使控制律所含项不再随系统相对阶增加而增加,降低了控制器的复杂性,并且避免了控制设计过程中可能存在的奇异值现象,此方法便于工程实现。仿真结果表明,所设计的控制器具有良好的控制性能。
1 问题提出
在自动舵的设计中,本文采用考虑舵机特性的Nomoto三阶数学模型:

2 简化的鲁棒自适应控制器设计





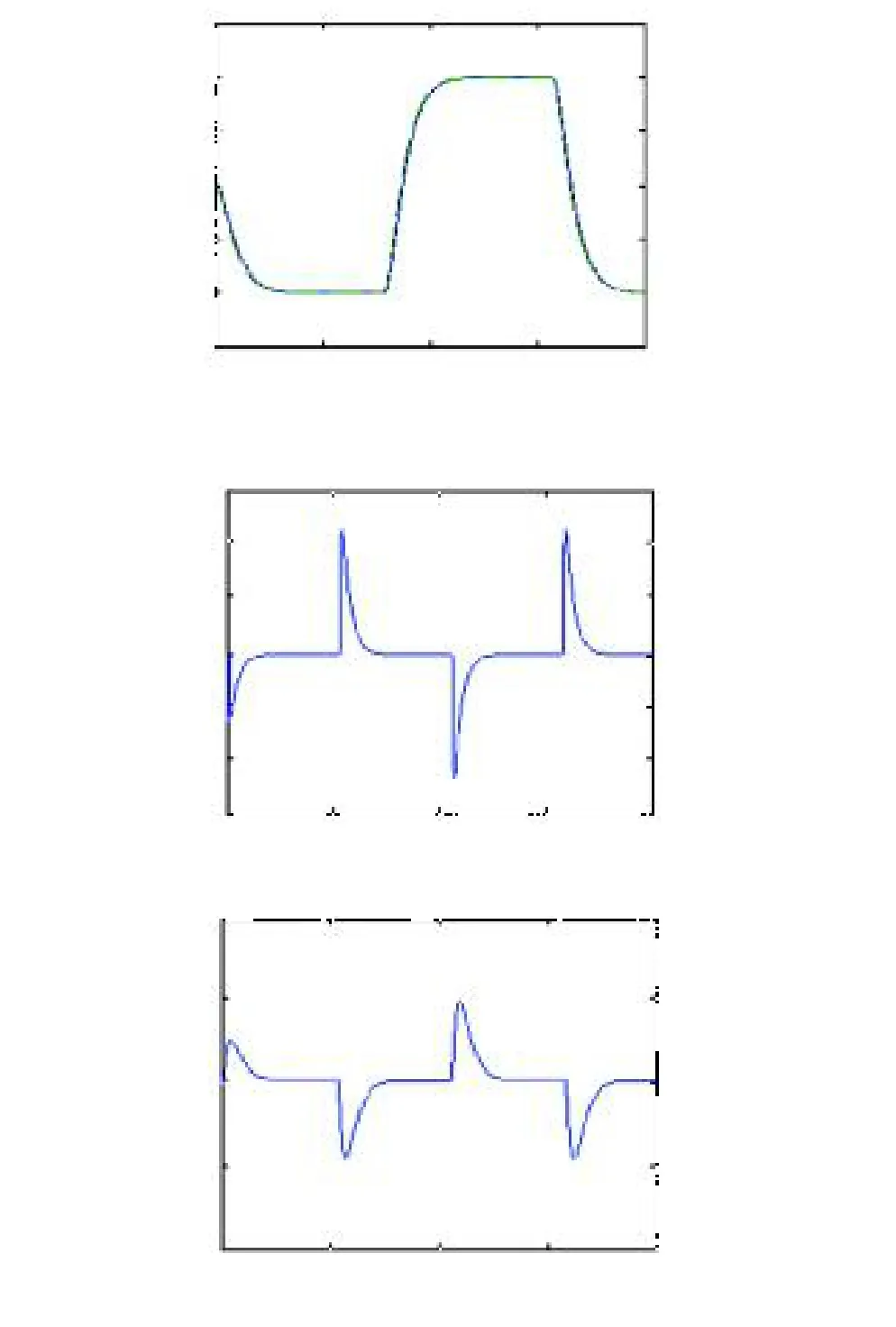
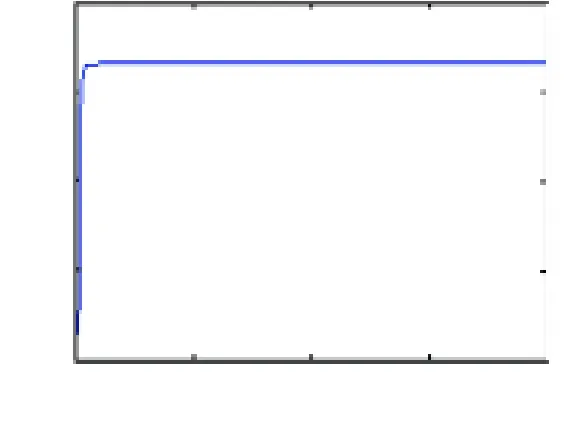
3 仿真研究
为验证本文所设计的船舶航向自适应跟踪控制器的性能,以中远集团5446TEU系列集装箱船COSCO Shanghai号的实船数据进行仿真,船长280米,船宽39.8 m,方型系数0.72,满载吃水

4 结论
本文研究了一种简化的鲁棒自适应自动舵控制算法。船舶模型采用带有舵机特性的三阶数学模型,系统不确定性由RBF神经网络在线逼近,系统自适应参数仅有1个,并且DSC降低了控制器的复杂性,易于工程实现。仿真结果表明所设计控制器的有效性。
[1] 刘雨,郭晨等. 基于 backstepping 的船舶航向滑模控制. 中南大学学报, 2007, 38:278-282.
[2] 杜佳璐, 郭晨, 杨承恩. 船舶航向非线性系统的自适应跟踪控制器设计.应用科技学报, 2006, 24(1):83-87.
[3] 罗伟林, 邹早建, 李铁山. 船舶航向非线性系统鲁棒跟踪控制[J]. 控制理论与应用, 2009, 26 (8):893-895.
[4] DU Jia-lu,GUO Chen. Nonlinear adaptive design for course-tracking control of ship without a priori knowledge of control gain[J]. Control Theory and Applications, 2005, 22(2): 315-320.
Simplified Robust Adaptive Control Approach to Ship Autopilot
Sun Hongying
(Qingdao Ocean Shipping Mariners College, Qingdao 266071, Shandong, China)
To study adaptive control design of ship autopilot, and considering the characteristics of the rudder system, a simplified robust adaptive neural network (NN) dynamic surface control algorithm is proposed. RBF neural network is used to approximate uncertain functions, and the adjusting mechanism of adaptive parameters is simplified to avoid the determination of too many parameters. The boundedness stability of closed-loop system is guaranteed and the tracking error can be made arbitrarily small. As a result, the controller designed by this approach has lower complexity and only one adaptive parameter to be tuned on line. The effectiveness of the presented autopilot is demonstrated by the simulation.
autopilot; neural network; dynamic surface control (DSC); backstepping; parametric uncertainty
TP273.2
A
1003-4862(2013)03-0026-04
2012-07-10
孙红英(1974-),女,讲师。研究方向:船舶运动控制、智能控制。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
自动化学报(2019年6期)2019-07-23
民用飞机设计与研究(2019年4期)2019-05-21
自动化学报(2017年4期)2017-06-15
电子制作(2017年24期)2017-02-02
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
浙江大学学报(工学版)(2015年1期)2015-03-01
汽车维护与修理(2015年6期)2015-02-28
学习月刊(2015年23期)2015-02-26
