
基于模糊逻辑的多传感器管理算法
2013-06-29 01:47崔博鑫许蕴山肖冰松张波雷
电视技术 2013年9期
崔博鑫,许蕴山,肖冰松,张波雷
(空军工程大学航空航天工程学院,陕西 西安 710038)
在传感器管理过程中,由于系统处于极度复杂和多变的外界环境中,威胁目标身份的不确定性、传感器探测精度的高低、电磁环境与战场态势等因素都是模糊的概念,可以采用模糊逻辑的方法来实现多传感器的管理。Stromberg[1]利用滤波误差作为控制的输入,文献[2]同时引入传感器视场(FOV),应用模糊控制实现了目标跟踪过程中的传感器管理。王放[3]介绍了模糊逻辑在目标识别系统中的传感器管理方法,但缺乏对目标识别特性和传感器性能的不确定性度量。
Hintz[4-5]等运用目标格和决策树度量目标识别的不确定性,但过程过于主观,识别特性也难以度量。Zadeh提出的Fuzzy集[6]已经应用到信息融合领域[7],但 Fuzzy集输出的隶属度是一个单值,不能同时反映支持和反对两方面信息。Gau和Buehrer提出的Vague集[8]能同时考虑非空元素隶属度与非隶属度,在处理不确定信息时比Fuzzy集有更强的灵活性和表达能力。
本文利用自适应神经模糊推理系统模糊化传感器性能,结合Vague度距离表达的目标不确定性,运用模糊推理规则,提出了一种基于模糊逻辑的多传感器管理算法。
1 基于Vague集的目标不确定度
1.1 Vague 集
令X={x1,x2,…,xn}为一个点(对象)的空间,其中的任意一个元素用x表示。针对多个未知目标的多个识别特性,归一化后得到特征矩阵R,给出合理的满意度下界L和不满意度上界U,可以得到目标Oj的属性集:
Fj={ai|rij>L},表示目标Oj的支持属性集,rij为目标Oj的第i个识别特性的值;
Aj={ai|rij<U},表示目标Oj的反对属性集;
Nj={ai|U≤rij≤L},表示目标Oj的中立属性集。
令

式中:tA(Oj)表示目标Oj的支持度,其中Ij={i|ai∈Fj};wi表示各识别特征的熵权矢量。同理可得目标Oj反对度fA(Oj)和中立度hA(Oj)。进行归一化处理,得到目标相对于模糊集“满意”的隶属度。

式中:t(Oj)为目标Oj相对于模糊集“满意”的真隶属度;同理,可以得到相对于模糊集“满意”的假隶属度f(Oj)和不确定度h(Oj)。
显然,有t(Oj)+f(Oj)≤1,t(Oj)+f(Oj)+h(Oj)=1。
则目标Oj在模糊集上的“满意”程度可用Vague值表示,即

1.2 目标不确定度
为了度量目标的不确定性,需要计算未知目标Oj与数据库中每个目标类型的距离。因此,对于目标类型Ok和未知目标Oj,定义目标的Vague度距离[9]为

显然0≤d(Ok,Oj)≤1。d(Ok,Oj)越大,表明未知目标 Oj与目标类型Ok距离越远,相似度越低;而d(Ok,Oj)越小,则未知目标Oj与目标类型Ok距离越近,即与目标类型Ok越相似。
假设数据库中有3类目标,根据式(4),可以得到未知目标与3类数据库目标的Vague度距离,可以记为d(Oj,Oi),并进行归一化处理,得

得到d1,d2和d3,两两相减可以得到3个Vague度距离的差值。差值越大,说明未知目标为某一类型的可能性越大,不确定性越小;差值越小,则说明未知目标判断为某一类型越难,不确定性越大。3个Vague度距离差值的算术平均表示未知目标判断为数据库所有目标类型(这里假设为3种)的可能性,用1减算术平均表示未知目标不是数据库中任何目标类型的可能性,即目标识别的不确定性。未知目标Oj的不确定性为

2 算法描述
假设传感器对目标进行识别,若在k时刻已经得到未知目标的相关信息,可以初步计算目标分类的不确定性,现在要对k+1时刻的未知目标进行进一步的传感器管理。依照模糊控制方法,选择k时刻目标分类的不确定性作为模糊控制器的精确输入。
2.1 精确输入量映射到相应的模糊集
目标身份的不确定性难以度量,采用Vague集的目标不确定度来表示,将输入量的论域由低向高划分为7个等级:VC(Very Certain),C(Certain),M(Medium),MUC(Mid-Uncertain),UC(Uncertain),MVUC(Mid-Very Uncertain)和VUC(Very Uncertain)。模糊隶属函数通常有钟形、三角形和梯形,这里采用三角形,则输入论域的划分如图1所示。

图1 输入论域的模糊集划分
在实际目标识别过程中,下一时刻的传感器分配,应该着重在对不确定性大的目标进行进一步观测识别,优先分配高精度传感器。对于不确定性小的目标在保证了其他目标观测识别后,如果还有多余的传感器资源,应当予以分配传感器。在保证对系统中传感器的管理调度后系统整体识别率能够提高的基础上,应当使输入论域中代表不确定性大的模糊区域覆盖更为广泛,并且其上的模糊隶属函数变化相对缓慢。
2.2 传感器性能的模糊划分
将模糊输出设定为传感器及其组合的识别性能,传感器性能的划分也是一个相对模糊的概念,自适应神经模糊推理系统——ANFIS[10],使用模糊神经网络技术把环境信息和专家知识引入融合系统,文献[11]利用模糊推理“如果—则”规则推导出红外传感器的可信度。本文选用ANFIS来评价性能可信度,通过模糊逻辑规则表得到传感器性能置信度,如表1所示。

表1 传感器性能置信度模糊推理规则
传感器及其组合的模糊级由精度高至低划分为6个等级:HAG(High Accuracy Group),HAS(High Accuracy Single-Sensor),MAG(Medium Accuracy Group),MAS(Mid-Accuracy Single-Sensor),LAG(Low Accuracy Group)和LAS(Low Accuracy Single-Sensor)。采用三角形模糊隶属函数,则划分输出的论域如图2所示。
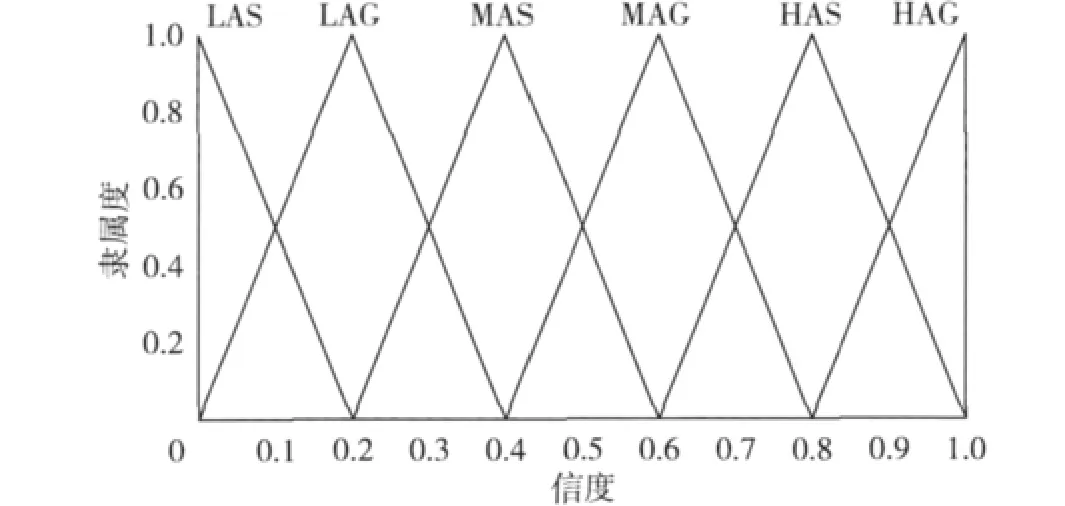
图2 输出论域的模糊集划分
单传感器的性能映射到相应的模糊集后,传感器组合的性能也应当根据单传感器的性能综合得出。Molina Lopez提出一种简单的方法[12],例如系统中有两个传感器s1和s2,则传感器组合的精度可以由表2中的规则获得。
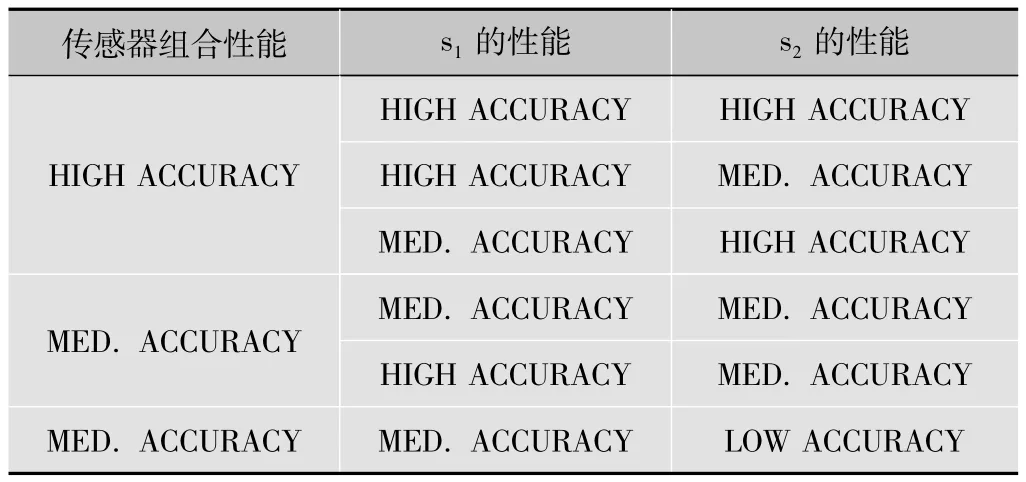
表2 传感器组合性能组合规则
2.3 模糊推理规则
这里采用最基本的“如果A,那么B”(If A,Then B)类型的模糊推理规则,如下:
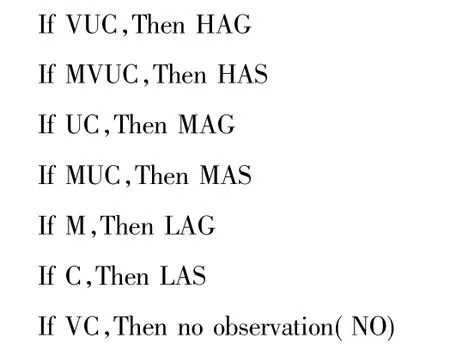
经过模糊推理后可以得到模糊控制输出,即给出待识别目标分配相应的传感器或传感器组合。最后对模糊控制的输出进行去模糊化,去模糊化策略的选择对模糊控制应用的有效性有直接影响[13]。
3 仿真实验
假设传感器系统有3个有源传感器,分别为合成孔径雷达(SAR)、电子支援测量(ESM)、敌我识别器(IFF),由于传感器观测空域和自身能力的限制,其观测目标数目为1,2和3个目标,传感器及其传感器组合共有7个。3个传感器表示为s1,s2和s3,根据ANFIS系统设定不同的探测精度,模糊化后分别对应HAS,MAS和LAS这3个模糊集,由表2可以得出系统中传感器组合的性能,其结果如表3所示。

表3 传感器性能模糊化结果
假设数据模型有3种目标:歼击机、巡航导弹和运输机,目标识别特性分别为多普勒频移,波长为0.2 m;雷达反射截面积(RCS),以波长为0.05 m,正侧向90°±5°的统计平均值为准;角闪烁,采用角闪烁噪声线偏差的均方根值;角速度特殊形状点和像素灰度。未知目标设定为5个,多目标识别的数据模型[14-15]如表4所示。

表4 多目标识别数据模型
对每个目标构造Vague集,给出满意度的下界(0.9)和不满意度的上界(0.35),运用式(2),计算每个目标的支持、反对和中立属性度,运用公式(4)~(6),得出未知目标的Vague度距离及目标不确定度,采用三角形隶属函数,模糊化系统输入,结果如表5。

表5 未知目标不确定度与模糊化结果
依据模糊控制规则“如果A,那么B”进行模糊推理,输出模糊结果。在去模糊之前,应充分考虑到单传感器或传感器组合的观测能力,如果分配给传感器的目标数目超过其观测能力时,应依据一定的准则进行调整。例如,将分配给该传感器或组合的目标依据隶属度大小进行排序,将隶属度排序靠前且在传感器观测能力之内的目标分配给该传感器,其余的目标分配给性能较差的传感器或组合。最终的管理输出结果如表6所示。

表6 基于模糊逻辑的多传感器管理算法结果
表6中,“1”代表相应的传感器或传感器组合分配给目标,“0”表示不分配。从表6中可以看出,单传感器或传感器组合均达到了分配目标的最大值,得到了充分的利用。当高性能的传感器或传感器组合分配的目标数超出了实际能力时,可以根据威胁目标对该传感器或传感器组合的模糊隶属度由高到低排列,优先满足隶属度高的进行分配,其余的目标则可以分配给相邻的下一性能等级的传感器或传感器组合。通过仿真实验,证明了基于模糊逻辑的多传感器管理算法在目标识别中的合理性和有效性。
4 结论
基于模糊逻辑的多传感器管理算法充分利用了模糊控制在复杂系统中的优点,避免了对威胁目标、传感器低、电磁环境与战场态势等因素精确建模的问题,完成了传感器的管理与调度。本文运用Vague集能同时表达事物支持、反对和中立3种属性的特点,用Vague度距离表达的目标识别过程中的不确定性,利用自适应神经模糊推理系统度量传感器性能。通过三角形隶属函数,将传感器性能及目标特性模糊化,依据“如果—则”模糊推理规则,提出了一种基于模糊逻辑的多传感器管理算法,实现了目标识别中的传感器管理。仿真结果表明,该算法合理有效,有直观、简单易行和计算量小等优点,具有很好的工程实践意义。
[1]STROMBERG D,PETTERSSON G.Parse tree evaluation-a tool for sensor management[EB/OL].[2012 -07 -10].http://isif.org/fusion/proceedings/fusion98CD/741.pdf.
[2]NG G W,NG K H,WONG L T.Sensor management—control and cue[C]//Proc.the Third International Conference on Information Fusion.[S.l.]:IEEE Press,2000:16-21.
[3]王放.融合自动目标识别系统中的传感器管理策略研究[D].长沙:国防科学技术大学,2004.
[4]HINTZ K J,MCINTYRE G.Goal lattices for sensor management[C]//Proc.SPIE,Signal Processing,Sensor Fusion,and Target Recognition.[S.l.]:SPIE Press,1999:3720-3725.
[5]MCINTYRE G A,HINTZ K J.An information theoretic approach to sensor scheduling[C]//Proc.the SPIE,Signal Processing,Sensor Fusion,and Target Recognition.Orlando,Folrida:SPIE Press,1996:304-312.
[6]BELL M R,ZADEH L A.Decision making in a fuzzy environment[J].Management Science,1970,17(4):141-146.
[7]王毅,雷英杰.基于Vague集的多传感器信息融合方法[J].计算机技术与发展,2007,17(4):232-235.
[8]GAU W L,BUEHRER D J.Vague sets[J].IEEE Trans.Systems,Man.and Cybernetic,1993,23(2):610-614.
[9]万树平.Vague集在多传感器目标识别中的应用[J].系统工程与电子技术,2009,31(9):2067-2070.
[10]权太范.信息融合神经网络—模糊推理理论与应用[M].北京:国防工业出版社,2003,211-217.
[11]敬忠良,杨永胜,李建勋,等.基于模糊神经网络和D-S推理的智能特征信息融合研究[J].信息与控制,1997,26(2):28-32.
[12]LOPEZ MOLINA J M,JIMENEZ RODRIGUEZ F J,CASAR CORREDERA J R.Fuzzy reasoning for multisensor management[C]//Proc.the 21st IEEE International Conference on Intelligent Systems.[S.l.]:IEEE Press,1995:1398-1403.
[13]姚敏.计算机模糊信息处理技术[M].上海:上海科学技术文献出版社,1999.
[14]黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2006.
[15]贾智伟,陈天如,李应红.基于多传感器信息融合的目标识别[J].系统工程与电子技术,2003,25(7):810-813.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
数学大世界(2021年4期)2021-03-30
成都信息工程大学学报(2021年6期)2021-02-12
山东农业大学学报(自然科学版)(2020年5期)2020-11-02
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
测控技术(2018年10期)2018-11-25
西华大学学报(自然科学版)(2018年6期)2018-11-24
广东石油化工学院学报(2016年3期)2016-05-17
电测与仪表(2016年23期)2016-04-12
