
车辆可控性评价研究
2013-08-14 05:42曹伟国
河南科技 2013年14期
向 飞 曹伟国
(装甲兵工程学院 机械工程系,北京 100072)
对普通机器而言,能客观地观察及预言该机器的性能和功能,从而客观地进行评价。而对于车辆而言,其性能仅仅由驾驶员直接操纵得以发挥,因而对其可控性的来说,驾驶员个人的主观评价尤为重要。迄今为止,尚无推导车辆可控性的理论方法,只能基于一些案例及其经验的研究方法进行分析。
1 车辆可控性研究方法
目前,解析表达车辆的可控性的理论方法尚未建立,甚至还没有一套通用的方法,以用于分析驾驶员人主观评价及量化表达车辆运动特性与其可控性评价之间的关系。因此,主要有三种方法被研究者采用,如图1所示,且每一种方法相应地适用于不同的具体情况。
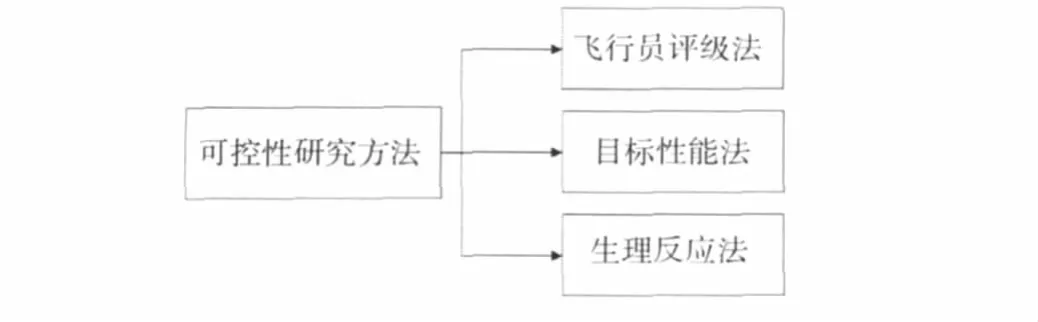
图1 车辆可控性研究方法
1.1 飞行员评级法
在飞机领域,作为定量表达飞行员对操纵稳定性主观评价的方法,即飞行员评价法(PR),被广泛应用。经过改进后,现已成为飞机操纵稳定性的通用评价方法。在设计“易于操纵的飞机”,即对飞机操纵性改进方面,发挥了重要作用[1]。
以PR为雏形,有人尝试通过驾驶员评级来度量对车辆可控性的主观评价。具体做法是:通过改变车辆的运动特性,然后进行实车试验,并由驾驶员给可控性进行评分。据此,系统地研究这些评分,以试图在一定程度上弄清车辆特性与其可控性之间的关系。由于车辆可控性最终体现于驾驶员个人的主观评价,因此,这种方法应该是最实际、最直接的。然而,该方法毕竟易受给出评价者个人差异的影响,因此,所得出的结果客观性、通用性较差。此外,如果总是用这样的方法,会为车辆运动特性与可控性的理论推导带来困难。而且,当车辆运动特性发生变化时,其可控制性也将难以预先判断。
1.2 目标性能法
另一种评价车辆可控性的方法是目标性能法。即:预先设定车辆的目标途径,然后进行实车试验来评价车辆的可控性。例如:观察车辆如何在某速度下、在某时间段内精确无误地通过设定的试验路程。目标性能法的优点是结果客观,但问题包括如何设定目标路径、如何评价所得的结果、是否能与驾驶员的主观评价结果很好的对应起来。况且,推导车辆运动特性与可控性关系的理论研究也较为困难。
1.3 驾驶员生理反应法
还有一种评价车辆可控性的方法,即测量驾驶人的生理反应,如驾驶员工作负荷的心律、能量代谢、通过皮肤电流测得的发汗量等。通过系统地改变车辆的运动特性,研究驾驶员生理的反应变化,以找出使车辆易于控制的车辆特性。然而,即使这种方法能获得可观的测量结果,但其数据本身易受到干扰因素的影响且驾驶员生理反应与车辆可控性之间确定性关系也不容易建立。
以上三种方法,都是由试验考察当车辆运动特性改变时,驾驶员对其可控性的评价方法。通过改变车辆运动特性,并研究车辆相应的可控性,有可能通过这些方法建立经验法则,在一定程度上找出车辆运动特性与其可控性之间的关系。同时,还能知道当车辆的运动特性发生改变时候时,如何预测车辆的操纵性。
然而,即使迄今为止尚未建立车辆可控性的一般通用方法。
2 车辆可控性影响因素
车辆可控性与车辆转向特性,车辆动力学特性和车辆转向瞬态响应参数都有一定关系,其相关性的研究有助于建立车辆可控性评价理论。
2.1 车辆转向特性
车辆的转向特性是影响车辆运动特性的一个重要因素。因此,首先研究车辆转向特性与其可控制性的关系。根据测量可知[2]:驾驶具有US特性车辆时驾驶人的心律120次/min左右,而驾驶员具有OS特性的车辆时,心律130~140次/min之间,意次味着与US驾驶特性的车辆相比,驾驶员驾驶OS特性车辆的工作负荷会更大。由此,可推断具有US特性的车辆比具有OS特性的车辆更易于控制。
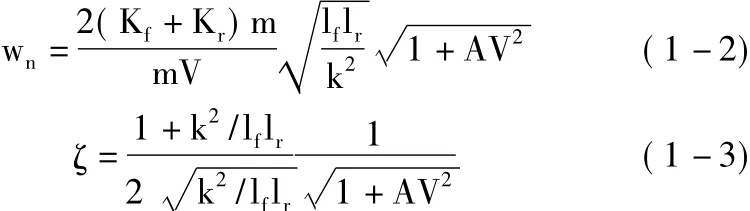
稳定性因子A是评价车辆US/OS特性强弱的指标,其计算公式如下:

经过试验分析,可知:车辆US特性越强,车辆越易于控制。然而,车辆稳定性因子A表示的是车辆转向特性,也是唯一直接影响车辆稳态特性的因素。但是,如果车辆的转向特性改变了,车辆所固有的动力学特性也会随之改变。而且,除了转向特性,其他因素也会影响车辆的动力学特性。因此,仅靠车辆的转向特性就来判断其可控性未必合适,不能简单得具有结论,说具有US特性的车辆更易于控制。
2.2 车辆动力学特性
车辆动力学特性包括车辆垂向、纵向和横向动力学特性。研究车辆可控性问时,主要考虑车辆的侧向动力学特性。
对一辆原本就是直线行驶车辆,若突然给其转向盘一个固定的侧向转角,然后松手,那么对一辆稳定的车辆而言,将在经历一些振动性的横摆运动后趋于稳态。这种情况下,决定车辆运动特性的指标之一是横摆阻尼,它受到车辆转向特性、转向系统特性及车身侧倾的影响。以两自由度模型描述的车辆侧向运动,得到理论上的系统国有频率wn和阻尼比ζ表达式如下:
美国的林克通过实验证明[3]:阻尼比相同时,车辆的固有频率越小,车辆的可控评级越不好。车辆固有频率与横摆阻尼比相比与可控性关联度更大。另外,美国霍夫曼等人研究表明:随着侧偏响应时间的增加,车辆变得更加难以控制。但仅以车辆的运动特性表达来评价车辆的可控制性还是不够的。
2.3 车辆转向瞬态响应参数
车辆转向时,对转向输入的车辆横摆角速度响应参数包括响应时间tt和增益常数G。威尔等人对实际车辆的响应时间tr和增益常数G等效值进行了测量,并研究了两者与车辆可控性的关系。实验发现对于增益常数G,不同的驾驶员其偏好的数值范围不同;响应时间范围,越熟练的驾驶员,其适应的响应时间范围越大。另外,伯格曼等人还研究了车辆侧向加速度增益Gy和侧向响应时间ty与可控性之间的关系。实验表明:相比侧向加速度增益常数,车辆运动的侧偏响应时间对车辆的可控性敏感程度更高。
通过考察车辆可控性以及两个反应运动特性的参数,可以较好地理解车辆可控性与车辆运动特性之间的关系。但如何表达车辆可控性这个问题,还无法保证应考虑哪些运动特性。因此,当主导车辆的参数发生变化,也不能轻言车辆就是易控的。
3 基于驾驶员模型的车辆可控性评价
到目前为止,对量化测量实际驾驶人对车辆可控性的评价,仍然没有如飞机的飞行员评级法那样精确、全面的通用方法。但在车辆转弯过程中,驾驶员会自适应于车辆不同特性,从而改变他自身的参数,由此可以认为,驾驶员参数可以反映车辆的操纵特性。因此,可以考虑是否可能基于驾驶员模型来考察来评价车辆的可控性[4]。
可以利用实验数据,通过采用驾驶员参数辨识的方法,试图表明驾驶员是如何随着车辆运动特性的变化去调整其自身参数的。驾驶员人-车辆模型如图2[5]。
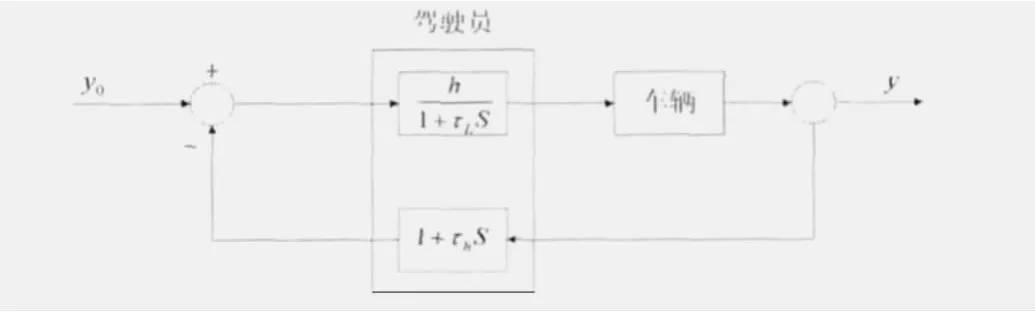
图2 简化驾驶员人-车辆模型框图
驾驶员模型主要由参数三个决定,车辆前视和微分动作的综合效果参数τh,驾驶员响应延迟时间τL和比例因子h。y0为前方L处目标路径,y为前方L处的,车辆位置,驾驶员基于预估的目标路径,通过转向操纵,使车辆达到目标位置。驾驶员模型中,参数h和τL代表驾驶员的响应性,参数τh表示驾驶员的微分动作程度。对于驾驶员说要使微分时间越小,驾驶员感觉车辆越容易。基于该模型,一旦得到驾驶员模型的辩识参数,就可以利用这些辩识参数推导出由驾驶员评价的车辆可控性。
[1]喻凡.车辆操纵动力学[M].北京:机械工业出版社,2012.
[2]T.Nakatsuka.Vehicle safety in high speed driving and human characteristics[J].The Japanese Journal od Ergonomics,Vol.4,No.4,1968.
[3]W.Linke etal.Analysis on vehicle running stability subjected to side wind on high way[J].Proceedings of Annual Meeting of JASE,No.761,1976.
[4]M.Abe et al.A study on vehicle handling evaluation through model based driber behavior[J].Proceedings of FISITA 2008,Munish September 2008,in CD.
[5]郭孔辉.汽车操纵动力学[M].长春:吉林科技出版社,1991.
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
汽车实用技术(2022年14期)2022-07-30
黑龙江大学自然科学学报(2022年1期)2022-03-29
哈尔滨工程大学学报(2022年2期)2022-03-11
汽车实用技术(2022年4期)2022-03-07
汽车文摘(2016年11期)2016-12-08
小雪花·成长指南(2016年11期)2016-12-07
公民与法治(2016年4期)2016-05-17
浙江大学学报(工学版)(2015年2期)2015-05-30
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
