数字摄像能见度仪的能见度算法设计及实现*
2013-08-16 01:08陈晓婷肖明霞蒋薇薇
网络安全与数据管理 2013年9期
常 峰 ,陈晓婷 ,肖明霞 ,2,蒋薇薇
(1.合肥工业大学 计算机与信息学院,安徽 合肥 230009;2.北方民族大学 电气信息工程学院,宁夏 银川 750021)
能见度分为白天能见度 (Meteorolog ical Visibility by Day)和 夜 间 能 见 度 (MeteorologicalVisibility by Night),通常意义下的能见度是指视力正常的人能够从背景中看到和分辨出目标物的最大水平距离[1]。由于它表征了大气透明度[2],对农业生产、交通运输安全以及民航部门都有着重要的意义。传统的能见度测量方法分为人工目测法和仪器测量法[3]。人工目测法同时受客观因素和主观因素的影响,往往出现较大误差[2]。常见的能见度仪器有透射仪、散射仪和激光能见度测量仪,这些能见度仪器不易维护。前两种仪器使用较为广泛,但价格偏高,易受到雨雪和沙尘天气影响。激光能见度测量仪测量结果相对客观,但价格十分昂贵,难以大范围使 用[2-5]。
20世纪40年代,STEFFENS C用照像法来测量能见度,由于当时技术水平的限制,这种方法并未得到实际应用[6]。随着科技发展,陆续有人提出利用数字相机来测量能见度,但并没有对结果的可靠性进行严格验证[7]。1999年,中科院院士周秀骥先生提出了数字摄像能见度仪的基本思路和构架[8],KWON T M等人利用摄像机完成能见度的计算[9]。数字摄像能见度仪因其低成本、易操作、易维护及高精度的特点得到了迅速发展。
已有的研究结果[4,8-11]具有重要的引导作用,本文采用CCD数字摄像机获取图像信息,设计并实现了能见度计算。其中,白天能见度采用双亮度差方法计算,夜间采用双光源方法计算,并对现有的双亮度差法进行改进,使其有更大的适用环境。整套算法通过CCD摄像机、图像采集卡和计算机平台得到实现,操作简单。在实验中与前向散射仪和大气透射仪的监测结果进行比较,得到了良好的观测结果,符合国际标准规定的误差要求。
1 能见度测量算法
能见度又称为可见度,在气象学中,能见度被定义为大气透明度,因此同一空气下能见度在白天和夜晚是一样的,其高低通常由空气中的悬浮物(如颗粒物、细微水珠等)的多少来决定。当一束光线穿过含有气溶胶颗粒物的气体层时,在颗粒物和气体的散射和吸收作用下,入射光线强度会随着穿过气层厚度的增加而逐渐衰减。 根据 Beer-Lambert[12]定律,入射光的消光量-dF(x,λ)(包括光的散射和吸收)与垂直穿过气体薄层微元厚度dx成正比,数学表达为微分方程式:

其中,b(x,λ)为穿过厚度的消光系数,单位为 m-1;λ 为入射光的波长,单位为μm;x为气体层厚度,单位为 m;F(x,λ)为光束在 x处的光强度,单位为 W/m2。
光束穿过X厚度气体层的消光量与入射光强度F0(x)之比称为视觉对比度C(x),即为一定入射光强下的消光率,表达式为[8]:

当穿过厚度为V的气体层,视觉对比度达到正常可视物体的最低限值称为视觉阈值对比度C。若不考虑入射光波长影响,推导可得[5]:

式 (3)被称为 Koschmieder公式[12](简称为 K氏公式)。其中,V称为视距,即为能见度;σ为消光系数。可见,当视觉阈值对比度为常数时,能见度V与消光系数σ一一对应,因此常用消光系数σ代表能见度水平。在大气学科中,常取 C=0.02[13]用于日常观测,则式(3)转化为:

根据式(4)可知,只要求得消光系数,就能得到能见度数值。本文针对白天能见度和夜间能见度分别设计使用双亮度差法和双光源法。本文能见度实现测量原理如图1所示。
1.1 双亮度差法计算白 天能见度[8,12-13]
双亮度差法即通过测量两个真实亮度为零的黑体经过不同光程的散射产生的气柱亮度,从而对能见度进行求解。设目标物黑体真实亮度为0,无穷远处气柱亮度为 B背景,则 L1与 L2距离上的气柱亮度分别为[8]:

图1 能见度测量原理框图

求得消光系数σ为:

将式(6)带入式(4),得到计算日间能见度的公式为:

工程实现上会采取使用黑体对应水平位置或最近水平距离位置的天空亮度作为当前的气柱亮度。但在某些情况下,因地面反射特性不均匀(如地表植被覆盖比例不同或地面高度起伏不平等)等因素,引起气柱照明条件不均匀,从而造成测量误差。本文使用背景信息进行重构来减小误差。
首先要对数字摄像机得到的图像进行分割,以得到所需要的背景信息。一般使用天空背景亮度作为无穷远处气柱亮度,即将天空区域分割出来作为背景信息。将太阳看作一个辐射体,对天空亮度(图像中表现为灰度信息)按太阳辐射方向进行拟合,并对未知区域的信息进行预测。由于数字摄像机位置固定,当太阳距离拍摄范围很远时,可视太阳位置为无穷远,而拍摄彩图范围内的太阳光线都是平行的,因此求出太阳高度角,按照该方向来进行黑体对于区域天空信息的拟合和重构。其计算公式为[14]:

其中,h表示高度角,φ表示地理纬度,σ表示太阳赤纬,t表示时角。可求得黑体对应区域的天空亮度信息,即黑体对应无穷远处的气柱亮度。这种算法可有效修正与探测器距离L1和L2上的气柱亮度,进而修正能见度值,减小由于无法准确获取气柱亮度而造成的误差。该算法适用于存在遮挡且气柱分布不均匀时引起测量误差超过规定范围的情况。
1.2双光源法计算夜间能见度
在计算夜间能见度的过程中,入射光强度 F0(x)通常不容易求得,且光源稳定性无法保证,使得无法准确地直接测量光源亮度。本文采用双光源法,不需要求解F0(x),也可以正常进行能见度的测量。
双光源法是指通过测量两个真实亮度相同、经过不同长度气柱衰减之后的目标光源视亮度,获得大气消光系数,从而计算大气能见度。
设两个目标光源真实亮度为B0,经过长度为L1和L2距离的衰减之后,变成视亮度 B′1、B′2[9]:

其中,BL1、BL2分别表示距离为 L1、L2的气柱亮度。 由黑体与光源距离探测器距离相等,黑体亮度即为光源气柱亮度[11]:

由式(9)和式(10)可求得消光系数 σ[9]:

将式(6)带入式(11),得到计算夜间能见度的公式:

2 实验结果及数据分析
本文实验于中科院合肥物质研究院楼顶进行,使用CCD摄像机作为图像获取来源。日间能见度实验和夜间能见度实验现场分别如图2和图3所示。

图2 日间能见度实验现场

图3 夜间能见度实验现场
图2的拍摄时间为北京时间2012年9月5日上午9:05,摄像机镜头方向朝向东方,两个黑体与摄像机的距离L1和L2分别为8 m和32 m。白色方框表示的是两个黑体的位置。为保证实验的准确性,两个黑体保持同样的水平高度。在图片拍摄时刻,黑体背后存在遮挡物,且图片右上方亮度明显比左上方要大,因此由天空信息重建来推导黑体对于无穷远处天空信息作为当前时刻气柱亮度。
图3的拍摄时间为北京时间2012年9月5日凌晨5:02,摄像机镜头方向朝向西方,两个黑体与摄像机的距离L1和L2分别为15 m和50 m。白色方框表示的是两个黑体的位置,两个灰白色圆形为光源。为保证实验的准确性,两个黑体和光源保持同样的水平高度,两个光源的光为同一光源发出,经光纤和分光器后送入由中科院自行研制的积分球,用以保证两个光源最大程度上的强度相同。
使用前向散射仪作为标准集进行结果比较。前向散射仪与摄像机朝向同一方向。在2012年9月5日凌晨0:00至夜间 23:59进行连续实验,每分钟拍摄图片一次,并将本文算法与前向散射仪结果进行对比,结果如图4所示。

图4 能见度实验结果对比
根据实验结果可知,由天空信息重建得到了很好的实验结果,本文算法结果与前向散射仪测量结果相关系数为0.981 2,均方根相对偏差[5]为5.21%。即本文算法结果与前向散射仪结果相近,算法测量范围为2 000 m~5 000 m时,可以得到满足WMO规定的能见度数值[15]。
2012年12月23日~24日使用整套装置在北京南郊进行连续数据采集,并同时与大气透射仪和前向散射仪进行能见度结果对比,结果如图5、图6所示。

图5 2012年12月23日能见度对比

图6 2012年12月24日能见度对比
将本文算法结果分别与前向散射仪和大气透射仪结果进行均方根相对偏差和相关系数[7]比较,结果如表1和表2所示。
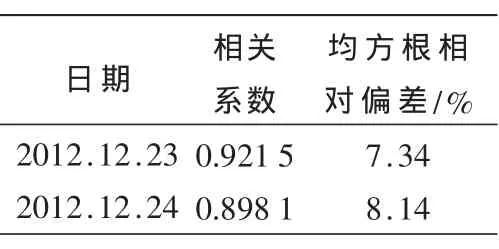
表1 与前向散射仪结果对比

表2 与大气透射仪结果对比
由实验结果可以看到,本文算法结果与大气透射仪结果相关系数更大,与前向散射仪均方根相对偏差更小。即本文算法测试结果在分布上与大气透射仪更为接近,但是与前向散射仪结果偏差更小。本文算法与两个仪器的测量结果比较,相关系数都达到8.5以上,除个别点因为处于白天与夜晚的交互期平均误差超过国际标准之外,其他各点都满足国际标准要求[15]。
从整体实验结果来看,本文设计的数字能见度算法在实际应用中的实测结果相对误差小于20%,达到标准能见度仪器的规定误差要求[15],可以作为日常能见度观测使用。
本文设计了数字摄像能见度仪的能见度算法。整套算法通过CCD摄像机、图像采集卡和计算机平台得到实现,并在实际使用中取得了良好的的实验结果。本文算法具有操作简单、比传统能见度观测仪器成本低的特点。后续需要解决的问题如下:
(1)CCD摄像机本身有暗电流和噪音,会影响图像信息。如何在有效保留所需图像信息的情况下去除这种影响值得探讨;
(2)考虑到设备的小型化、便携化和高效性,后期可以开展整体方案在嵌入式上的实现工作。
[1]CAVALLO V,OLOMB M,DORE J.Distance perception of vehicle rearlightsin fog[J].Human Factors,2001,43(3):442-451.
[2]邢向楠,崔岩梅,张富根,等.能见度测量技术现状及发展趋势综述[J].计测技术,2010,30(5):15-20.
[3]尹淑娴,罗鹍,莫伟强.人工目测与仪器测量的能见度数据资料分析[J].气象水文海洋仪器,2009,9(3):66-69.
[4]吕伟涛,陶善昌,刘亦风,等.基于数字摄像技术测量气象能见度——双亮度差方法和试验研究[J].大气科学,2004,28(4):559-570.
[5]周秀骥,陶善昌,姚克亚.高等大气物理学[M].北京:气象出版社,1991.
[6]STEFFENS C.Measurement of visibility by photographic photometry[J].Industrial Engineering Chemistry, 1949, 41:2396-2399.
[7]LEGAL T, LEGAL L, LEHN W.Measuring visibilty using digital remote video cameras[J].American Meteorological Society, 9th SYMP on Met Observ&Instr, 1994:87-89.
[8]谢兴生,陶善昌,周秀骥.数字摄像法测量气象能见度[J].科学通报,1999,44(1):97-100.
[9]李勇军,张玉钧,周毅,等.基于分水岭分割算法夜间能见度仪的图像处理方法研究来源 [J].大气与环境光学学报,2012,7(02):131-138.
[10]GALLEN R, CORD A, HAUTIÉRE N.Towards night fog detection through use of in-vehicle multipurpose cameras[J].IEEE Intelligent Vehicle Symposium (IV′11), 2011.
[11]KWON T M.An automatic visibility measurement system based on videocameras[R].MinnesotaDepartmentof Transportation,MN/RC-1998-25, 1998:1-68.
[12]LENSCHOW D H,VIEZEE V, LEWIS R, et al.大气边界层探测[M].周秀骥,等译.北京:气象出版社,1990.
[13]饶瑞中.大气中的视觉和大气能见度 [J].光学学报,2010,30(9),2486-2492.
[14]金祖孟.地球概论(第三版)[M].北京:高等教育出版社,1997.
[15]王京丽,程丛兰,徐晓峰.数字摄像法测量能见度仪器系统比对实验[J].气象科技,2002,30(6):353-357.
猜你喜欢
计测技术(2020年3期)2020-08-04
计量学报(2020年4期)2020-05-29
摄影之友(影像视觉)(2019年3期)2019-03-30
小天使·六年级语数英综合(2017年5期)2017-05-27
中国交通信息化(2016年6期)2016-06-06
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27