
基于惯性基准路形计系统特性分析
2013-08-22 07:34薛劲橹迟宝山王红岩刘忠卿
制造业自动化 2013年1期
薛劲橹,迟宝山,王红岩,刘忠卿
(1. 装甲兵工程学院 机械工程系,北京 100072;2. 西藏拉萨77626部队41分队,拉萨 851400)
0 引言
路面不平度测量装置按测量基准不同分为固定基准装置和随动基准装置;按是否与地面接触可分为接触式测量装置和非接触式测量装置。基于惯性基准的路形计属于随动基准接触式测量装置,其结构简单,幅频特性优良,应用较为广泛。
1 测量装置系统简化及振动分析
基于惯性基准路形计结构较为简单,为便于分析,不考虑测试轮的动变形,忽略测试轮的刚度和阻尼,则仪器可简化为一个单自由度振动系统,由质量块、刚度和阻尼组成,如图1所示。

图1 测试装置简图
该单自由度系统的振动方程为:

该方程的解为有阻尼自由振动齐次方程的通解X1及非齐次方程的特解X2之和。
1.1 有阻尼系统自由振动
与式(1)对应的齐次方程的通解为:

1)欠阻尼(z<1)
此时式(2)为:


将式(6)代入式(4)可得系统自由振动响应。

由式(8)可知,系统的振幅被限制在Ae−ζw0t和之内,并随时间衰减,如图2所示:
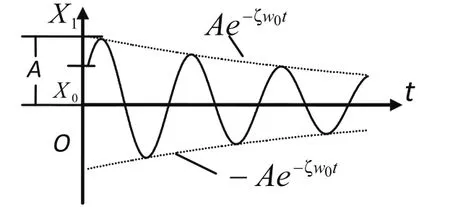
图2 衰减的自由振动
2)临界阻尼( 1=z )
式(2)变为:

由式(10)可知响应按指数规律衰减,如图3所示:
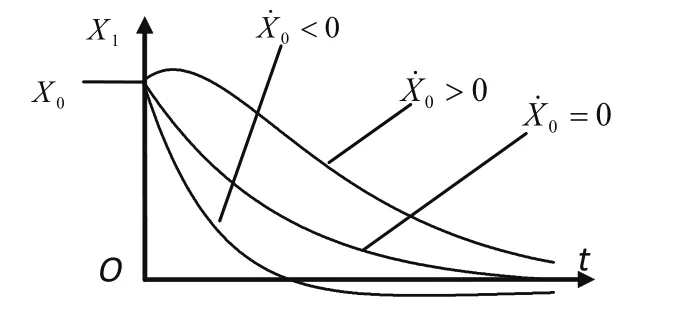
图3 临界阻尼情况
3)过阻尼(1>z)
式(2)变为:

如图4所示为初值 0)0( =X 、 1)0( =X˙ 时的响应曲线。
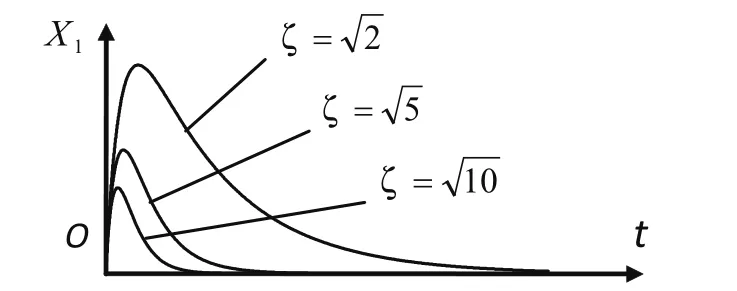
图4 过阻尼情况
1.2 系统对路面不平度简谐激励的响应
单自由度系统振动方程(1)可写为式(12)的形式,即变为一个强迫振动方程:


其中:F为简谐激励响应的振幅, )( tj- 为相位差,将式(13)代入式(12)得:

将上式右端改写为:
将式(15)代入式(14)得:

对于式(16),为使任意t时其值都为零,则:
由式(18)、(19)可知简谐激励的响应振幅和相位差只决定于系统本身的特性参数(C、M、K)、路面不平度激励的幅值Q0与频率w,与初始条件无关。
式(13)可写为:
图5为系统对简谐激励响应的幅值随l变化的曲线:

图5 响应的振幅特性曲线
由图5可得如下结论:
3)当l接近于1时,系统与路面激励产生共振,响应幅值达到最大,有阻尼系统的共振频率为越大,共振频率越小。
图6和图7为系统对简谐激励响应的相位随l变化的曲线,图6和图7分别为路面的高频和低频部分:

图6 响应的相位特性曲线

图7 响应的相位特性曲线
由图6和图7可得如下结论:
1)l趋于无限大时,相位差趋近于 2/p ,即在路面高频范围内,响应幅值与路面激励的幅值相差 2/p 个相位;2)l趋于零时,相位差趋近于零,即在路面低频范围内,响应幅值与路面激励幅值趋近于同相。
2 测量装置幅频特性分析
频响特性是路面不平度测量仪器最重要的性能指标,它决定了测量的可靠度。频率响应特性包括幅频特性和相频特性,对基于惯性基准的路形计相频特性不是很重要,所以本节主要分析系统的幅频特性。


绘制系统的幅频特性曲线,纵坐标为幅值比,横坐标为路面频率,设该系统的固有频率如图8所示为 z =0, z =0.1, z =0.4,时的系统幅频特性双对数坐标曲线。
由图8可得以下结论:1)当路面激励远低于自振频率时,系统的质量M和测量轮之间不产生相对运动,此时Q-X=0,系统的幅频特性远小于1,不能测量这样低频的路面谐波分量。2)当路面的激励频率远高于自振频率时,系统质量M的位移X=0,则Q-X=Q,幅频特性为1,系统可较准确地测量路面不平度。3)路面输入频率在系统固有频率附近时,出现峰值,如图7所示。加大系统的阻尼比z可以有效消减共振。
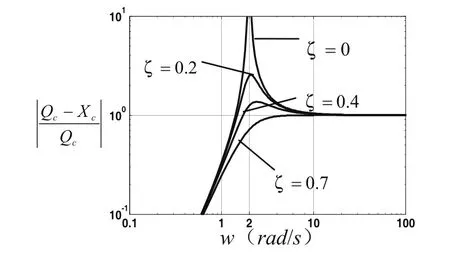
图8 幅频特性
3 测量波长范围与测试速度关系
路面不平度是长度表示的空间域,在测量过程中通过速度将路面不平度空间历程转变为时间历程。由于波长l与频率w满足 wvfv /2/ p l == ,当v分别取10km/h、20km/h和40km/h时(2.78m/s、5.56m/s和11.11m/s),l与w的关系曲线为:

图9 波长与频率关系
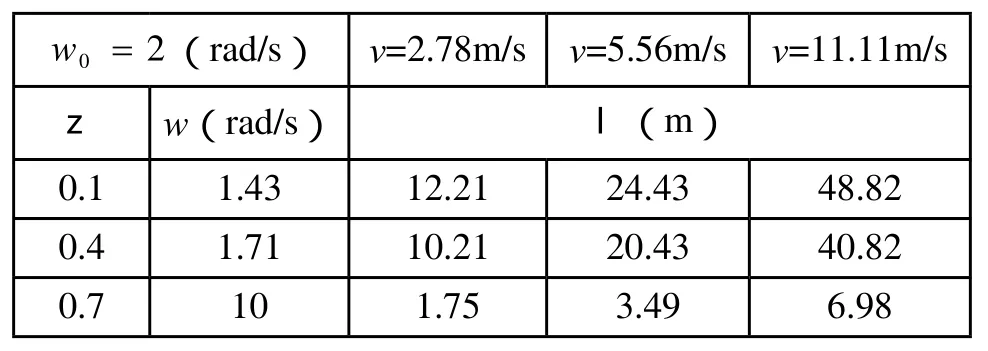
表1 固有频率固定
由表1可知:系统固有频率一定时,适当减小阻尼比可增加仪器的波长测量范围,且测量速度越高,可测量的最小波长越大。
3)当系统阻尼比一定时,根据式(29)可求出令系统幅值比为1的最小路面谐波频率,代入式可求出对于不同车速的可测量最大波长。设阻尼比为 z =0.4。

表2 阻尼比固定
由表2可知:系统阻尼比一定时,适当降低系统固有频率可增加仪器的波长测量范围,且测量速度越高,可测量的最小波长越大。
4 结论
1)将基于惯性基准的路形计简化为一单自由度振动系统,对其无阻尼自由振动以及在简谐激励下的强迫振动进行了分析。2)幅频特性是路面不平度测量装置最重要的性能指标,通过分析系统幅频特性曲线可知,当路面激励远低于自振频率时,系统的幅频特性远小于1,不能测量这样低频的路面谐波分量;当路面激励频率远高于自振频率时,幅频特性为1,系统可较准确地测量路面不平度。3)对一系统特性参数固定的系统,测量速度越高,则可测的最小波长越大。4)对系统特性参数进行设计时,固有频率一定,适当减小阻尼比可增加仪器的波长测量范围;系统阻尼比一定,适当降低系统固有频率可增加仪器的波长测量范围。
[1] 石锋,段虎明,杨殿阁,等.路面不平度的测量[J].武汉理工大学学报,2010,32(3).
[2] 段虎明,石峰,谢飞,等.路面不平度研究综述[J].振动与冲击,2009,28(9).
[2] 赵济海,王哲人,关朝雳.路面不平度的测量分析与应用[M].北京:北京理工大学出版社,2000.
[3] 张义民.机械振动[M].北京:清华大学出版社,2007.
[4] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[5] 刘新宇,肖传宇,吴勇.惯性基准高程测量方法在路面平整度检测中的应用[J].交通信息与安全,2009,27(5).
[6] 卢俊辉,巫世晶.基于车轮振动的路面实时识别研究[J].振动与冲击,2008,27(4).
猜你喜欢
振动与冲击(2022年1期)2022-01-27
农业知识(2021年19期)2021-10-16
地震研究(2021年1期)2021-04-13
振动与冲击(2019年4期)2019-02-22
青岛画报(2017年12期)2018-02-06
科技创新导报(2017年28期)2017-11-28
商周刊(2017年22期)2017-11-09
电子技术与软件工程(2017年8期)2017-05-10
电脑知识与技术(2016年4期)2016-04-11
现代电子技术(2015年11期)2015-07-28
