
基于模糊免疫自适应PID的工业电炉多点温度协调控制
2013-08-22 07:34蔡志端毛建华王培良
制造业自动化 2013年1期
蔡志端,毛建华,王培良
(湖州师范学院 信息与工程学院,湖州 313000)
0 引言
工业电炉是一种工业热处理设备,主要用于机械、冶金等行业的零部件加工,这些行业都要依靠热处理加工过程的质量提升市场竞争力[1]。为满足加工工件性能指标,要求炉内温度波动范围窄,且区内温度分布均匀。工业电炉一般会设置多个加热区,每个区安装电加热管,各区独立加热,这样有利于控制炉内温度的均匀性分布。工业电炉加热控制为一个非线性、大惯性,大滞后过程,难以用精确数学模型来描述。针对以上特点,国内外学者提出了众多温度控制方法。如有基于神经网络算法[2,3]、PID算法[4]、模糊控制算法等智能算法[5,6],并取得相应效果。但目前针对工业电炉温度控制的研究,主要集中在温度精度控制,而对区内温度的均匀性控制并没有深入研究。在加热过程中,由于炉内空气循环并不流畅,炉区内温度分布可能具有较大不均匀性,若控制不佳,温度的非均匀性会严重影响加工工件质量。为此,论文以炉内同区多点温度值为控制目标,以区内多个电加热管输出功率为控制量,提出基于模糊免疫自适应PID的多点温度协调控制方法,协调控制炉内同区多温度点,即达到炉内温度的控制精度要求,又可保证炉内温度的均匀性要求,提高加工工件成品率及质量。

图1 工业电炉温度控制系统原理图
1 炉温控制系统结构
工业电炉炉内温度环境对提升产品质量起到关键作用,通过控制区内不同点的温度以满足加工工艺对温度的精度、均匀性等要求。图1所示为某一工业电炉温度控制系统示意图,该电炉分为8个加热区,每个加热区上下部分都设有采用晶闸管控制的电加热管,并采用热电偶测量该区不同点的温度值。控制器结合各区温度设定值和实际温度值,通过智能算法输出功率调节器的控制信号,以控制电加热管的输出功率,达到温度调节目的。
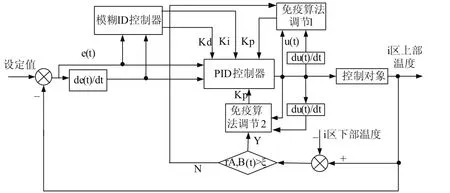
图2 温度控制器结构图
2 模糊免疫自适应PID温度控制原理
2.1 控制器设计
根据实践经验,工件加工质量受同区温度均匀性影响最大。为达到有效而快速控制,控制器只考虑同区电加热管的输出功率协调控制。常用的模糊PID温度控制器,以误差E和误差变化EC为输入量,完成不同环境下PID参数的自适应整定,达到温度精度的控制。考虑到工业电炉区内温度均匀性要求,在输入中增加同区上下两点的温度差输入量,设计三维模糊PID控制器,以协调控制同区上下两个电加热管输出功率,这样即可控制区内温度精度,又可控制区内温度均匀性。但对于模糊PID控制器而言,维数的增加使得控制器的设计及整定变得很复杂,控制响应速度变慢[7]。为预防温度均匀性目标的控制影响温度精度目标的控制,控制策略采用两个并联模糊控制器完成温度的控制。当同区上下温度差 rA,B(t)小于设置的阈值ξ时,采用模糊控制器1完成温度精度的控制,而不考虑温度均匀性控制问题;当温度均匀性误差超出设置阈值时,采用模糊控制器2进行控制。在温度均匀性控制中,只考虑温度相对高的炉区部分电加热管功率输出控制,使其输出功率减少,温升速度减慢;对温度相对低的炉区部分电加热管输出控制并不改变控制策略,这样就避免了协调控制的复杂性。为减小两个控制器在切换过程中产生过度性突变,在制定模糊控制规则中要考虑过程问题。如图2所示为系统PID控制器设计原理图。控制器采用两个并联模糊控制器实现3维模糊控制器的功能,这样及达到了控制要求,又降低了运算的复杂性,提升了控制速度。
在PID参数整定过程中, ki、 kd参数直接通过模糊自适应整定,而pk参数由免疫算法进行调节,以减少模糊PID算法的不足。控制器通过对同区上下两部分温度点的值实时比较,以选择不同的免疫调节算法。
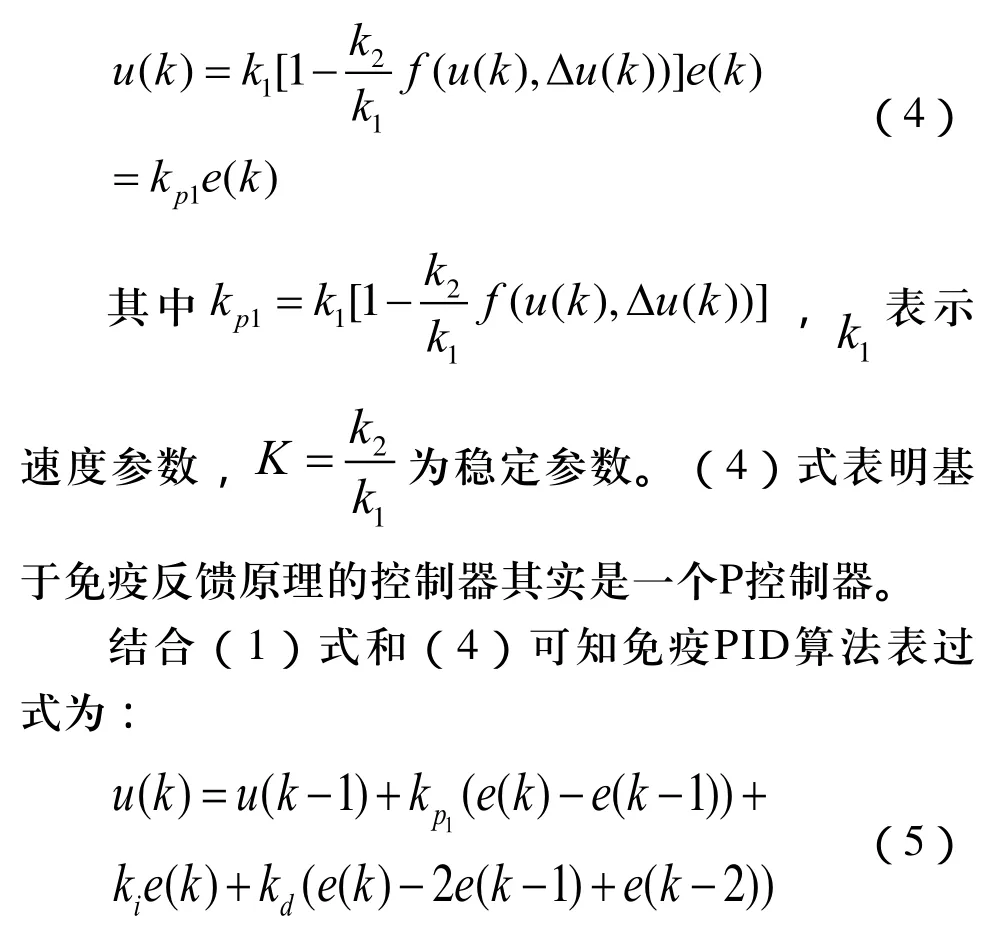
2.2 模糊免疫PID算法
常规增量式PID算法离散公式为

式中pk、ik、dk是PID算法中的比例、积分、微分系数。PID控制器核心是通过各智能算法对三大系数时行整定,以达到良好的控制效果。
根据图2控制器结构示意图所示, ki、 kd参数直接通过模糊自适应ID控制器整定。模糊自适应ID控制器是由常规ID控制器和模糊控制器组成。模糊控制器主要由模糊化、模糊推理、模糊判决、去模糊化[8]四部分组成。控制器将温度误差e(t)、温度误差变化量ec(t)和同区两点温度差 rA,B(t)通过模糊化处理,确定其隶属度形成了模糊推理中温度误差E、误差变化率EC和相邻两区温差 RA,B(t)三个输入量,模糊控制器的输出是Δki、Δkd。
控制器器的目标是在每个周期找出输入与输出的模糊关系并对ik、dk两个参数时行在线修改,以满足温度要求。根据实际经验制定模糊控制规则表,并在模糊推理过程中根据输入量进行查表,推理出来的输出量用最大隶属度方法进行模糊判决,得到相应的输出量,对输出量进行去模糊化处理,最终获得实际控制值,以该值控制晶闸管的开度,达到控制温度的目标。在制定模糊控制规则表时,可从系统稳定性、响应速度、超调量、稳定精度等方面[9]考虑ik、dk两参数整定要求。

图3 模糊免疫自适应PID输出

图4 同区上下两部分温度控制
kp参数由免疫算法进行调节。免疫算法是一种模拟生物免疫系统中抗体自适应调节的一种优化算法。生物的免疫系统可以通过产生抗体来抵制外来侵犯的抗原,这一过程是T细胞中TH细胞和TS细胞影响产生B细胞的数量增多或减少,最终使免疫反馈系统趋于平衡的过程。

在免疫PID算法中,将 ()ke 设为常规PID算法中的 ()ek, ()sk设为 ()uk。则(3)可表示为。
3 仿真实验结果
为验证论文所提出的控制器的有效性,设典型的工业电炉温度系统传递函数[11]为:

采用Matlab软件对该模型运用论文中所提出的控制器进行仿真实验。模糊自适应ID控制器设计的核心是建立对ik、dk两个参数自适应整定的模糊控制的规则表。首先对输入量 ()et、 ()ect进行模糊化处理。取输入量温度误差E的基本论域为[-150℃,150℃],温度误差变化量EC的基本论域为[-10,10],输出量ikΔ、dkΔ的基本论域为[-0.05,0.05]和[-1.5,1.5] 。输入与输出变量均采用7个模糊变量值,分别为NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大),即模糊子集为{NB,NM,NS,ZO,PS,PM,PB},以上模糊变量值论域都取为[-8,8]。隶属度函数采用三角函数和S形函数组合描述。在建立模糊控制规则表时,依据ID参数整定原则和技术人人员实际操作经验,反复实验调整确定。实验采集周期采为10s。 pk参数由免疫算法进行调节,在免疫算法计算中,取1k表示速度参数为0.5,K为稳定参数为0.8。按以上设置进行实验仿真得到仿真结果为如图3、图4所示。图3表明基于模糊免疫PID算法的温度控制能准确地跟踪所设定的目标温度值,以满足温度精度控制要求。图4为同区上下两部分温度的控制结果,结果表明两部分温度能相互跟踪从而满足温度均匀性要求。
4 结论
根据工业电炉热处理过程中对温度参数的要求及工业电炉温度控制滞后、大惯性和随机扰动、模型不确定等特点,采用模糊PID和免疫算法相组合复式的温度控制策略,完成工业电炉温度控制器的设计。该温度控制器已在浙江省湖州市某工业电炉企业应用。现场运行结果表示,论文中的温度控制算法具有良好的控制效果,系统以温度精度与温度均匀性为控制目标,符合工业电炉热处理加工工艺要求。
[1] 陈海龙,陈光宇,杨建新,李熠.浅析中国工业电炉的现状与发展[J].黑龙江科技信息,2010,(19):23.
[2] 万汉伟,龙伟,庞彪,蔡永陵,程磊.神经网络预测控制在分段台车式电阻炉温度控制中的应用[J].金属热处理,2010,35(8):75-78.
[3] 武应倩,李红星.BP网络建模在电炉控制系统中的应用[J].微计算机信息,2007,23(22):19-20,45.
[4] 李丙旺,张友照,陈文建.基于PID分段式温度控制系统的设计与实现[J].自动化应用,2011,(4):21-22.
[5] 文定都.基于模糊控制算法的炉温控制系统[J].工业炉,2007,29(3):30-33.
[6] 文定都.电加热炉温控系统的模糊免疫自适应PID控制的研究[J].仪表技术与传感器,2008,(7):22-24.
[7] 王建平,邵威,金铁江.模糊自适应PID控制器及其在电子万能试验机中的应用[J].合肥工业大学学报(自然科学版),2009,32(9):1343-1347.
[8] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:机械工业出版社,2004:67-82.
[9] 马占有,田俊忠,马泽玲.温度控制系统模糊自适应PID控制器仿真研究[J].计算机仿真,2010,27(10):160-163.
[10] 周颖,王润泽,宋丹丹,杨鹏.基本模糊免疫PID-Smith自适应控制算法的研究[J].河北工业大学学报,2011,40(1):13-16.
[11] 文定都.电加热炉温控系统的模糊免疫自适应PID控制的研究[J].仪表技术与传感器,2008,(7):22-26.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国特种设备安全(2022年6期)2022-09-20
石油沥青(2022年2期)2022-05-23
湖南水利水电(2021年6期)2022-01-18
小学阅读指南·低年级版(2020年10期)2020-10-12
制造技术与机床(2017年3期)2017-06-23
自动化学报(2017年4期)2017-06-15
电子制作(2016年21期)2016-05-17
空间控制技术与应用(2015年2期)2015-06-05
中医研究(2014年4期)2014-03-11
