小型多关节工业机器人设计
2013-08-23 11:11四川普什宁江机床有限公司研发院都江堰611830
金属加工(冷加工) 2013年20期
四川普什宁江机床有限公司研发院 (都江堰 611830) 赵 军

通用机床研究所所长 赵 军
工业机器人与自动供料装置、物流线连接组成自动装配单元,完成自动化物流生产线上的装配作业。小型多关节工业机器人为数控五轴关节坐标形式,运动关节轴采用带编码器交流伺服电动机驱动,半闭环位置反馈的开放式数控系统。交流伺服电动机直接驱动摆线减速机、谐波减速器等机构,最大限度地减少传动误差;各关节主支撑回转导轨采用高精度、高刚性的十字交叉滚柱轴承,保证关节运动的灵活及工业机器人高精度重复定位;配置不同的手指附件装置可满足自动化物流生产线的装配工序要求,适用于汽车、摩托车、工程机械及家电行业自动化生产线上。小型多关节工业机器人的外形尺寸及运动空间位置如图1所示,手腕外形轴侧投影如图2所示。
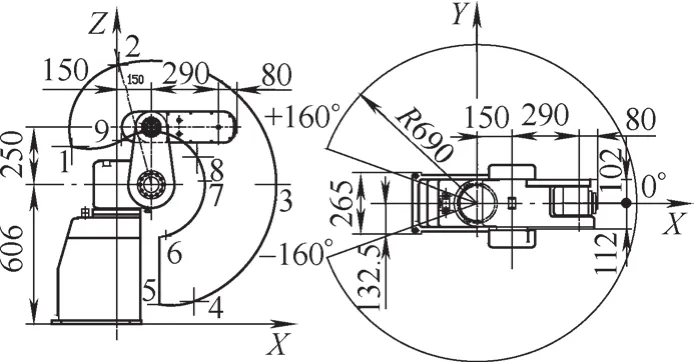
图1 外形尺寸及运动空间位置
小型多关节工业机器人特点

图2 手腕外形轴侧投影
(1)高精度 工业机器人各关节的传动平稳性、重复定位精度是工业机器人性能主要指标,在小型多关节装配工业机器人本体结构设计中,突破机械传统设计观念,采用大减速比高精度的摆线减速机,通过伺服电动机直接与摆线减速机相联接,驱动工业机器人关节运动,改善工业机器人原有的传动链长,传动结构复杂,传动误差大的缺点。通过数控系统对位置误差及反向间隙进行补偿,保证工业机器人位置重复精度不大于±0.05mm。
小型多关节工业机器人采用自制复合型、高精度十字交叉滚子轴承如图3所示,因轴承中圆柱滚子在呈90°的V形沟槽滚动面上相互垂直的排列,轴承可承受径向负荷、轴向负荷及倾覆力矩等所有方向的负荷。内外圈的尺寸最大限度地小型化,外圈采用两体分割的构造,轴承预紧量可调整,通过施加预紧负荷,而获得高刚性、高精度,轴承回转、轴向跳动精度不大于±0.01mm。该轴承应用于工业工业机器人的关节回转部位,从而缩小工业机器人关节支撑件安装空间及简化支撑结构,提高工业机器人传动刚性及运动几何精度。

图3 十字交叉滚子轴承结构
(2)模块化设计 为扩大开发出的工业机器人自身通用性,适应不同自动化生产线的要求,将交流伺服电动机、摆线减速机及十字交叉滚子轴承集成化、模块化设计如图4所示,与物流系统自动线的针对性、单一准确性相结合,达到柔性可调和高效、高精度的目的。
根据工业机器人的不同功能需求、不同负荷及精度要求进行模块化组合,模块之间具有统一的、标准化的界面,达到缩短设计制造周期、降低制造成本的目的。
工业机器人控制系统预留与外界设备相连接的各类I/O接口,如:I/O Precess插接头式、I/O Modulea插槽式、I/O Moduleb整体式、I/O Link Adupter等,以便于物流系统自动线连接,适应工业机器人可重构化及满足自动化生产线柔性化要求。
(3)高速度 工业机器人快速直线移动速度1500mm/s,满足自动生产线高节拍的工作效率要求。在额定负载和最大速度条件下,工业机器人按图5所示轨迹从A点运动到D点,并从D点返回到A点(按ABCD—DCBA)进行循环运动。用仪表计时,其结果不大于4s,可适应自动生产线5s/件高生产节拍的要求。
(4)控制系统高柔性 装配工业机器人应用得好坏,控制策略与方法及其对应软硬件系统是关键。将工业机器人控制系统按“工业机器人群”考虑,其控制既能适应群体系统控制,也能保证各独立工业机器人之间的协调配合,同时每个独立工业机器人的控制方式和结构,能方便地实现与其他工业机器人或自动生产线的连接及通信。独立工业机器人的控制从系统的角度出发,使之具有与其他工业机器人与设备的互联和协调的工作能力,以工程数据库和现场总线网络为支撑技术,规划好数据结构、通信协议及各种规范的软硬件接口,所有控制软件采用模块化设计技术,增强控制系统的柔性和适应性。

图4 关节模块组合
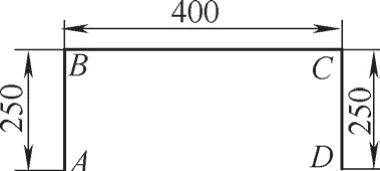
图5 运动速度测试
工业机器人的主要技术规格参数
工业机器人的主要技术规格参数如附表所列。

工业机器人的主要技术规格参数
工业机器人本体设计
小型多关节工业机器人总体布置如图6所示,工业机器人对于不同的自动线而各异,但其基本组成是一样的。一般是由工业机器人本体、工业机器人电气控制系统、带力传感器机械手指、视觉系统、工业机器人专用控制软件等组成,其基本框架如图7所示。
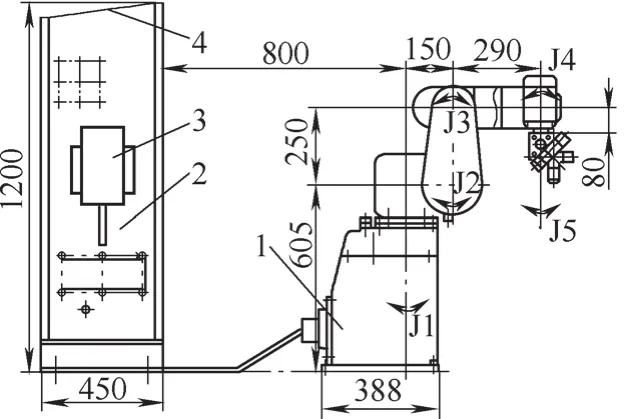
图6 工业机器人总体布置

图7 小型多关节装配工业机器人基本组成
工业机器人本体各运动关节轴的结构设计:
(1)J5轴 J5轴为工业机器人手腕回转轴之一,是工业机器人与外界手部装置相连接的接口关节,用于改变手部在空间的方位。结构设计中,在保证本身刚度和强度的前提下,尽可能使结构紧凑,重量轻,以利于减轻臂部的负载。结构如图8所示。
交流伺服电动机5经平键带动谐波减速器3驱动十字交叉滚子轴承1回转。
J5轴关节传动利用谐波减速装置的特点:结构简单,零件较少,体积小,重量轻,同时啮合齿数多,传动精度高,承载能力大,传动比范围宽且特别大等,加上自制的高精度、高刚性十字交叉滚子轴承1,使关节整体结构紧凑,重量轻。
(2)J4轴 J4轴为工业机器人手腕回转轴之一,驱动J5轴回转,用于改变手部在空间的方位。结构设计中,除要求与J5轴设计要求相同外,考虑到该轴的传动布置,采用三级齿轮减速形式。结构如图9所示。
交流伺服电动机8经平键带动轴齿7经两级双联齿轮3、5和齿轮1减速,其中通过调整双联齿轮3、5的支撑轴来控制传动齿轮间隙,达到减小齿隙及传动噪声,提高传动精度的目的。自制的高精度、高刚性十字交叉滚子轴承2保证J5轴运动精度;辅助支撑架11即作为J5轴的辅助支撑点,又起到内藏式走线支架的作用。在J4轴结构零件设计上,注重零件的重量及转动惯量问题,在强度、刚性足够的情况下,尽量减轻零件的重量和转动惯量,达到减少手臂和腰关节负荷,提高工业机器人整体性能的要求。
(3)J3、J4轴 该两轴组成工业机器人的手臂系统,工业机器人的臂部用于支承腕部与手部,带动手部按一定的运动轨迹由初始位置到达另一指定位置。结构如图10所示。交流伺服电动机3、9直接联接在摆线减速机2、8上,缩短传动链,减小传动误差,同时将两个回转关节轴固定在主支撑臂1上,其传动刚性由主支撑臂1零件强度决定,使手臂传动刚性很容易得到保证;在主支撑臂1的另一端,留出足够的空间用于工业机器人电缆、气管等设置,辅助支撑臂11即作为走线槽又起到辅助支撑的作用。

图8 J5轴结构

图9 J4轴结构
(4)J1轴 J1轴为工业机器人腰关节回转轴,驱动工业机器人手臂以上各关节做大范围的回转运动,使工业机器人手部工作器在工业机器人运动范围内工作。结构如图11所示。
伺服电动机2联接摆线减速器4进行一级减速,通过与摆线减速器输出端相联接的齿轮副5、7进行二级减速,构成J1轴机械传动系统,整套传动系统密封在油池箱内,起到降低齿轮传动噪声、减小齿轮磨损的作用。
(5)机械手指附件 机械手指附件结构如图12所示:根据工业机器人的工作性质、工作负荷及针对零件的形状而设计,作为工业机器人的特殊订货部件。图12所示交换式机械手主要用于生产线的装配工位及机床加工零件上下料,对于喷漆、冷却、焊接等工序只需在工业机器人腕关节联接处配置气枪、水枪和焊枪等装置,即能实现不同工序的要求,用两个机械手指可同时实现零件的自动上下料换装工作,提高工业机器人的利用率。

图10 J3、J4轴结构
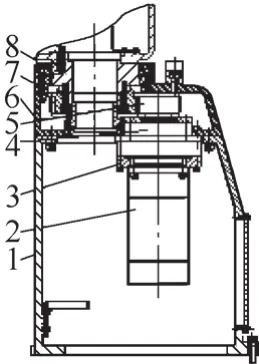
图11 J1轴结构
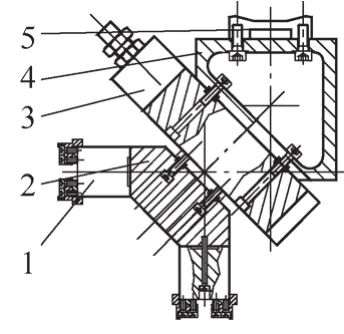
图12 机械手指附件
猜你喜欢
汽车实用技术(2021年23期)2022-01-05
哈尔滨轴承(2021年1期)2021-07-21
防爆电机(2021年1期)2021-03-29
哈尔滨轴承(2021年4期)2021-03-08
轴承(2018年10期)2018-07-25
北京航空航天大学学报(2017年9期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10