深水自升式钻井平台主要结构参数设计方法研究
2013-09-12 06:14谢建新陶魏峰周春华王广茂唐文献
机械设计与制造工程 2013年11期
谢建新,庄 宏,陶魏峰,周春华,王广茂,唐文献,张 建
(江苏科技大学机械工程学院,江苏镇江 212003)
深水自升式钻井平台主要结构参数设计方法研究
谢建新,庄 宏,陶魏峰,周春华,王广茂,唐文献,张 建
(江苏科技大学机械工程学院,江苏镇江 212003)
在研究深水自升式钻井平台主要结构参数的基础上,根据深水自升式钻井平台工作要求并结合相关设计规范,通过对现有自升式钻井平台的主要结构和性能分析,提取相关参数,运用拟合函数建立其数学模型,得出各参数间的关系函数,根据这些函数关系,估算出对应工作水深的平台结构参数。
自升式钻井平台;参数设计;拟合函数
21世纪,随着世界经济的快速发展,全球对能源的需求不断扩大,许多国家把注意力转向海洋,并投入大量的人力物力来开发海洋资源,自升式海洋钻井平台在其中扮演着举足轻重的角色。
自升式钻井平台的设计使用年限一般是20年,经过翻新可使用30年。到2012年,全球大部分的自升式钻井平台运作已达30年,其中一些已经无法翻新或有效地采纳先进科技,必须被新的取代,同时市场对更先进、效率更高的设备需求增加,海事行业前景较为乐观[1]。我国在海洋钻井平台的设计、建造、检验和科研方面都迫切需要发展,特别是在海洋钻井平台的设计上,目前大多依靠外国的技术。自升式钻井平台的载荷情况复杂,船体和桩腿之间的连接机制也很复杂,很难找到简单的公式对平台的受力进行计算,随着工作水深的增加,平台的受力情况将会变得更加复杂[2]。目前,针对自升式平台开展的相关技术研究较多[3-4],但对平台总体参数进行具体计算方法的研究未见报道。
为此,本文试图通过对现有自升式平台尺寸进行研究,找出平台相关参数与工作水深的关系,运用拟合函数建立数学模型,以此为依据可以更快估算出平台尺寸。
1 模型建立
1.1 深水自升式钻井平台结构介绍
要确定的平台参数是平台自重、桩腿长度、弦杆间距、桩腿横纵间距、船体体积和桩靴面积等,如图1所示。

图1自升式钻井平台术语
1.2 参数建模
根据收集到的资料数据(见表1),绘制了需要设计的参数与可能相关的已知参数的关系图,画出趋势线(线性、对数、多项式、乘幂、指数、移动平均值),计算出方差,取方差值最小的趋势线作为此关系图的规律线。

表1 世界主要深水自升式钻井平台[5]
1.2.1 平台自重—工作水深
平台自重是由桩腿、桩靴、升降装置、船体以及平台上其他一些固有构件的质量所组成。在平台设计时,应确保平台具有足够的强度,除承载设备及人员外,还能抵御环境载荷产生的不利影响,众多因素使平台自重随着工作水深的加深变化很大,如图2所示。
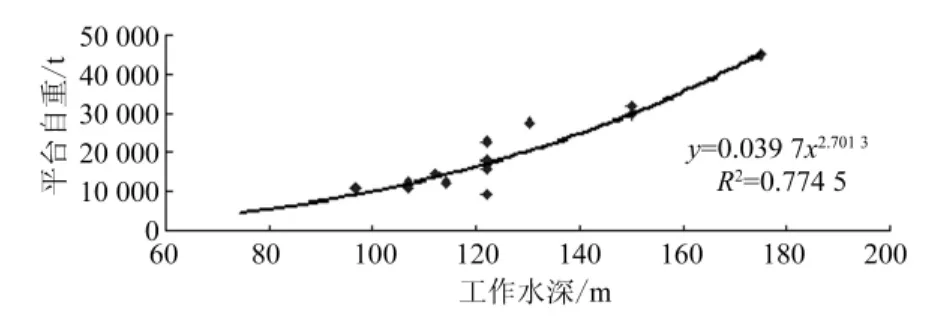
图2 平台自重—工作水深
1.2.2 桩腿长度—工作水深
工作时桩腿下放插入海底,平台被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷。桩腿长度由极限波高、气隙高度、桩腿入土深度、工作水深、船体型深、桩腿剩余长度等几部分组成(如图1所示),其中工作水深对桩腿长度影响最大。从图3中可以看出,桩腿长度和工作水深成正比关系,由此可以近似地得出两者之间呈线性关系。
1.2.3 弦杆间距—船体自重
利用麦秆原理,把一些高大的柱子和杆件都设计成空心的。这样可以大大提高他们的承压能力。起到“重半功倍”的作用[6]。为承受特定质量的平台,桩腿中主弦杆间距相当重要,其中主弦杆间距与船体自重的关系如图4所示。
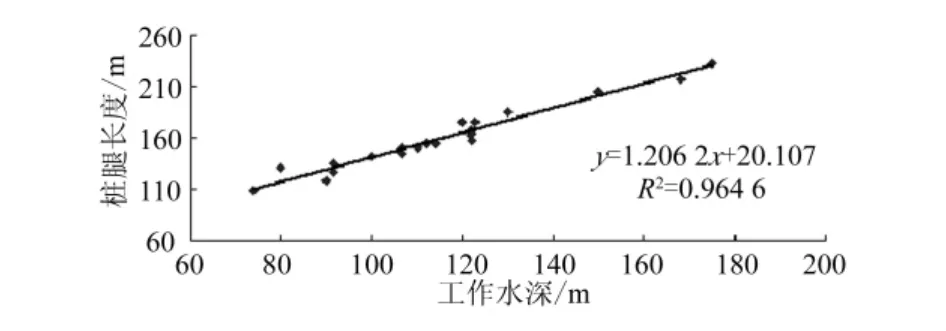
图3 桩腿长度—工作水深

图4 弦杆间距—船体自重
1.2.4 桩腿横纵间距—工作水深
桩腿的分布位置,即桩腿之间的纵向间距和横向间距,直接影响到平台的着底稳性,也影响着环境力作用的各桩腿所承受的轴向载荷。桩腿之间的纵向间距和横向间距越大,平台的抗倾斜稳性也越好[7],如图5 所示。
1.2.5 船体体积—船体自重
船体体积和船体自重成正比关系,如图6所示。1.2.6 桩靴面积—船体体积

图5 桩腿横、纵间距—工作水深

图6 船体体积—船体自重
桩靴的主要作用是减少桩腿的入泥深度,使吊装船在升起的时候更平稳,减少桩腿的受力等。桩靴的设计质量直接影响整个平台的性能好坏,因此平台桩靴的设计至关重要。依据地质调查结果及平台的设计质量和环境因素,选择合适的桩腿形式[8]。桩靴面积与船体体积之间的关系如图7所示。
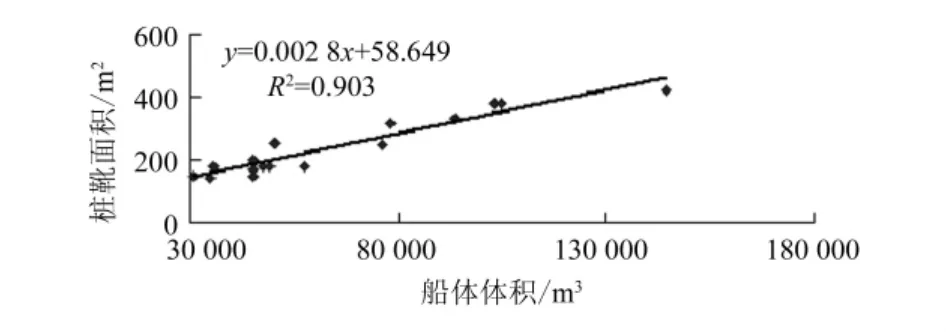
图7 桩靴面积—船体体积
2 应用实例
以水深为180m的自升式钻井平台为例,平台正常工作时的可变载荷为4 000t,自存工况下的可变载荷为2 700t,通过调研得到南海的波高为16.8m,气隙高度15.2m。结合已经得到的函数关系,可以计算出该自升式钻井平台的平台自重、桩腿长度、弦杆间距、船体体积和桩靴面积,详见表2。

表2 平台主要参数
首先参照 CJ80—X175—A(工作水深175m)的比例,船体尺寸初定型长110m、型宽100m、型深13m。其次,由于桩腿材料相同,即屈服极限一定,那么桩腿主弦杆外径D和厚度h与船体的自重T呈一定的数学关系,即D2∝T及h2∝T,初定桩腿主弦杆外径与厚度值为735mm×137mm。
3 基于有限元的桩腿结构强度校核及优化
桩腿作为自升式钻井平台的重要组成部分,其安全性直接关系到整个平台的安全性,因而有必要对桩腿结构进行强度校核及结构优化,在保证桩腿结构安全的前提下,不断优化桩腿结构型式,使其受力更加合理并且经济性更佳。
3.1 桩腿结构参数设计
根据上述方法初取桩腿结构参数,见表3。
选取桩腿材料为MW450V(屈服极限应力为520MPa),安全系数取1.67。采用Hepermesh软件对所设计的桩腿进行仿真分析,得到最优的桩腿结构形式。

表3 桩腿结构参数 m
3.2 计算条件
平台工作水深为180m,考虑50年一遇的极限设计海况,即风暴自存工况,风速为51.5m/s,波高为15.2m,周期为9s,海流速度为1.8m/s,海水密度为1 029kg/m3,可变载荷2 700t。
用Hepermesh软件对所设计的桩腿进行仿真分析:考虑单桩腿结构,风载荷是静力作用,而且相对较小,可以忽略不计,因而载荷组合为波浪载荷+海流载荷+重力载荷。由于波流同向时产生的应力和位移最大,因而考虑波流同向。由已有知识可知,波流入射角为80°时,应力和位移最大。
3.3 静力结果分析
由图8和图9可知,最大应力值为273.5MPa,最大位移值为0.518 9m。

图8 应力云图(单位:Pa)

图9 位移云图(单位:m)
3.4 桩腿结构优化
从整体看,桩腿下部受力较大,上部受力较小;主弦杆受力较大,支撑杆受力较小。从局部看,泥面处主弦杆应力最大,要考虑对相应结构进行加强。计算分析表明,主弦杆受到的最大应力为273.5MPa,水平撑杆的最大应力为51.9MPa,斜撑杆的最大应力为36.1MPa,水平撑杆的最大应力为12.6MPa,说明主弦杆受到的力比支撑杆大得多,因此在设计中可以适当减小支撑杆的尺寸。
在外力、结构形式和杆件外径保持不变,最大应力小于312MPa,最大位移小于0.4m的情况下,通过改变杆件的壁厚来使结构的质量最轻。适当增加桩腿底部杆件的壁厚,减小上部杆件的壁厚。主弦杆从底部向上应力越来越小,特别是桩腿泥面处,有应力集中现象,需增加壁厚来增加强度;而向上壁厚可以逐渐减小,支撑杆应力都小,可以减小尺寸。此外,水平撑杆、斜撑杆、小撑杆壁厚均可相应减小,且优化后桩腿质量为20 130t。通过综合比较分析,为使桩腿结构质量减轻,优化后各杆件的壁厚见表4。
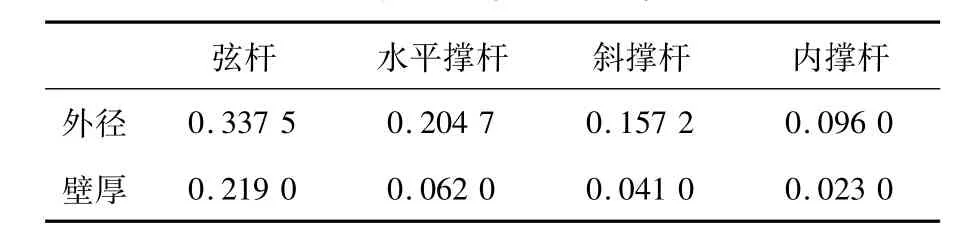
表4 优化后桩腿结构参数 m
3.5 优化后桩腿结构静力分析
优化后的桩腿应力与位移如图10、图11所示。

图10 应力云图(单位:Pa)

图11 位移云图(单位:m)
通过计算、分析表明:在满足各种约束条件的情况下,优化后的桩腿质量比优化前的桩腿减小14.9%。
4 结束语
本文通过对已建成的自升式钻井平台的主要数据进行研究,运用拟合函数建立数学模型,并以此为依据计算出了工作水深为180m(600ft)的自升式平台主要参数。结果表明,本文所用的分析方法可靠有效,对深水自升式钻井平台主要参数的设计具有指导意义。但这些不是最终的参数,随着设计的深入,会不断地对这些参数进行修正。
[1]陈宏.自升式钻井平台的最新进展[J].中国海洋平台,2008,23(5):1-7.
[2]陆晟.350ft自升式平台站立工况总体分析[J].船舶设计通讯,2010,2(S2):71-75.
[3]王运龙,林焰,纪卓尚.自升式钻井平台方案设计系统分析和结构模型[J].中国造船,2009,50(4):149-155.
[4]Tang W X,Tang Z X,Xia T,et al.Optimum structural design of the hull on jack - up platform[J].Advanced Materials Research,2013,631:936-941.
[5]陈宏,李春祥.自升式钻井平台的发展综述[J].中国海洋平台,2007,22(6):1-6.
[6]张辰燕.翻译自然的设计[J].百科知识,2009(3):14-16.
[7]郭洪升.“中海油5”自升式钻井平台总体研究设计[J].船舶,2009,20(3):1-5.
[8]任宪刚,李春第,杨红敏.海洋自升式钻井平台桩靴研究[J].石油矿场机械,2009,38(12):18-22.
[9]中国船级社.海上移动平台入级与建造规范[S].北京:人民交通出版社,2005.
Study on the Structural Parameters Design Method of Deepwater Jack-up Drilling Platform
XIE Jianxin,ZHUANG Hong,TAO Weifeng,ZHOU Chunhua,
WANG Guangmao,TANG Wenxian,ZHANG Jian
(Jiangsu University of Science and Technology,Jiangsu Zhenjiang,212003,China)
Based on the structural parameters analysis of deepwater jack-up drilling platform including platform weight,length of spud leg,chord pitch,horizontal and vertical spacing of legs,pile shoe size and so on,it illustrates the main parameters and the main performance according to relevant design specifications,extracts relevant dimensions,establishes the mathematical model,and builds the relationship between the parameters of the platform.Based on above result,it can estimate the parameters of the corresponding depth platform.
Jack-up Drilling Platform;Parameter Design;Fitting Function
U661.4,U674.38
A
2095-509X(2013)11-0030-05
10.3969/j.issn.2095-509X.2013.11.008
2013-05-28
谢建新(1991—),男,江苏镇江人,江苏科技大学本科生,主要研究方向为结构设计与分析。
猜你喜欢
河北水利(2022年10期)2022-12-29
舰船科学技术(2022年20期)2022-11-28
海洋通报(2022年4期)2022-10-10
海洋石油(2021年3期)2021-11-05
现代工业经济和信息化(2016年19期)2016-05-17
船海工程(2015年4期)2016-01-05
焊接(2015年9期)2015-07-18
浙江国土资源(2015年4期)2015-05-09
海军医学杂志(2015年2期)2015-02-27
中国舰船研究(2014年6期)2014-05-14