直升机协调转弯机理分析及控制律设计
2013-09-15 05:13王国才
直升机技术 2013年1期
王国才
(海军驻景德镇地区航空军事代表室,江西景德镇 333001)
0 引言
协调转弯是现代直升机自动驾驶仪必备的功能之一。直升机进行转弯机动或导航飞行时,如果不能实现协调转弯,便会出现侧滑,使飞行阻力增大,乘坐品质变差。因此,合理设计相应的控制律,实现协调转弯功能,对改善直升机的飞行品质和操纵品质无疑具有重要的实际意义。
针对直升机协调转弯控制律的设计,文献[1]开发了基于MFCS的协调转弯模态控制律,给出了结构配置及系统参数设计的具体方法。文献[2]采用了常用的全包线调参方法,但计算量较大。文献[3]采用LQG与PID相结合的协调转弯控制律结构,然而给出的结果形式上比较复杂。文献[4]将直升机协调转弯控制律的参数拟配问题作为一个含有约束的多目标优化问题处理,采用多目标遗传算法在全包线范围内进行搜索,所设计参数的物理意义不很明确。上述文献给出的方法各具特色,都具有参考价值和理论意义,但在对协调转弯机理分析和控制律结构参数的物理解释方面还显不足,且在工程实现及试飞调参上具有一定难度。
本文针对某型直升机协调转弯控制律的设计指标要求及存在的具体问题,从物理原理上分析了飞机协调转弯应满足的条件,确定了协调转弯控制律的关键参数,进而给出了控制律合理的结构,采用分析、仿真等手段完成了协调转弯控制律的设计。针对某型直升机协调转弯存在的具体问题,设计了退出协调转弯切换到航向稳定模态过渡过程中的瞬态处理方法,克服了退出转弯时的航向抖动问题,经试飞验证,该方案可行和有效。
1 直升机模型及协调转弯过程描述
直升机的协调转弯功能是利用航向和倾斜通道的协调配合来实现的。某型直升机的协调转弯控制系统结构图如图1所示。图中γ,ψ分别为倾斜角和航向角,γ˙,ψ分别为倾斜角速度和航向角速度,y¨为侧向过载,AIC为驾驶员横向周期变距操纵输入量,δrc为驾驶员尾桨桨距操纵输入量为倾斜通道控制律参数为航向通道控制律参数,为协调转弯控制律参数分别为航向通道和倾斜通道伺服放大器的输出。

图1 直升机协调转弯控制系统框图
协调转弯过程中,驾驶员首先横向压杆,经助力器、自动倾斜仪使直升机倾斜,由垂直陀螺测得的γ和˙γ信号经过控制器综合后经伺服放大器、倾斜舵机输出,与驾驶杆信号相抵消,从而使直升机保持一定的倾斜角。当γ>4.5°时,γ和¨y分别经过比例控制参数 kδγ和 kδY¨加权组合后输出给航向通道同步器。同步器的输出以及另一路¨y信号经过kδY¨比例放大后与ψ综合,经限幅再与˙ψ综合,经航向舵机、助力器和尾桨桨距机构使直升机连续改变方向,最终实现协调转弯。
自动驾驶仪的协调转弯功能是在直升机三轴稳定的基础上实现的。一般情况下,飞行员在起飞之前会将操纵台上“俯仰”、“倾斜”、“航向”和“转弯”按钮按下,接通相应的控制通道。当飞行员横压驾驶杆使直升机倾斜角γ>4.5°且飞行速度大于设定值时,驾驶仪进入协调转弯工作状态。航向通道则应以适当的航向角速度跟随倾斜角,使直升机在转弯时不出现侧滑。当直升机从转弯状态改出,倾斜角γ<2.5°时,驾驶仪断开协调转弯功能,转入航向稳定状态。这样可以避免当倾斜角在4.5°附近波动时协调转弯和航向稳定工作状态的频繁切换。
2 协调转弯过程机理分析及控制律设计
根据协调转弯工作原理,从理论上分析其需要满足的条件。设直升机在某一高度进行稳定的转弯飞行(如图2所示),转弯半径为R,飞行速度为V,相应的航向角速度(即转弯角速度)为˙ψ。协调转弯要求不出现侧向过载,即直升机的重力mg与其随转弯产生的离心力F0所构成的合力必须和机舱地面垂直,如图3所示。
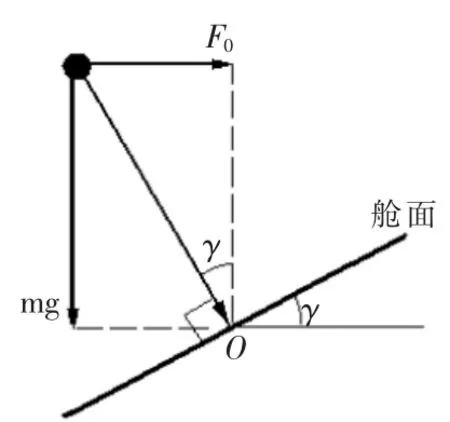
图3 协调转弯时物体受力分析图
此时有

由于所设计的直升机为大型运输机,飞机转弯时的倾斜角限制在25°范围内,因而近似有tanγ≈γ,故可得出,由此得出倾斜角到航向角的传递函数

这就是直升机在稳定的协调转弯飞行过程中航向角与倾斜角应当满足的约束关系。但在实际飞行中,直升机从航向稳定状态进入转弯时,倾斜角是由飞行员通过压杆实现的,倾斜角大小要根据任务需要来控制,因此,航向角速度也要随之及时调整。直升机沿纵轴的转动惯量较小,因而倾斜运动比较迅速,而沿法向轴的转动惯量大,所以航向改变比较迟缓。这样就造成飞行员压杆后,倾斜角反应较快,而航向角速度不能及时匹配,产生滞后现象,造成飞机内侧滑,达不到满意的协调转弯状态。为使直升机航向角速度能及时跟随变化中的倾斜角,达到即时协调转弯的目的,在协调转弯控制律中设计了通道,相当于引入了航向角速度的微分信号,起到提前控制的作用,提高航向角速度动态跟随倾斜角的能力。协调转弯要求在转弯时尽量减小(最好消除)侧向过载,在机动飞行中,要让航向角速度在任何情况下都能随倾斜角及时变化是不现实的,出现侧向过载是情理之中的事。为了进一步减小实际产生的侧向过载,提高协调转弯控制的效果,将机上的侧向加速度计信号引回来进行反馈,并采用其比例-积分控制,以利于消除机动飞行过程中实际产生的侧向过载。由此确定了协调转弯的控制律结构(对应图1中虚线框内的部分)。

其中,侧向加速度信号的比例系数kδY、积分系数kδY¨可以根据直升机控制系统数学模型用控制系统设计方法设计得到,而航向微分系数kδγp可以通过系统仿真确定。
经过系统仿真和实际试飞调参,协调转弯功能完全实现,达到了预定的目的,证明所设计的控制律结构参数合理正确。
3 退出转弯时新航向基准的确定
在实际飞行中,当直升机改出转弯,倾斜角达到2.5°时,驾驶仪由协调转弯状态切换到航向稳定状态,此时驾驶仪会自动记录并保持当前航向角。由于退出转弯时直升机仍然具有一定的航向角速度,因此会随直升机航向运动的惯性继续向转弯方向偏转,航向角会偏离退出转弯瞬时记录的基准值,使得航向通道不得不进行反向调整,造成转弯退出瞬间出现航向抖动现象。
针对航向抖动的原因,控制律采用了在退出转弯进入航向稳定状态瞬间,以当时的航向角为基础,再根据当前航向角速度进行加权,适当向转弯方向修正的协调策略,确定新的航向基准,新航向角基准角公式

其中ψ*是新的航向角基准,ψ0,˙ψ0分别是退出转弯瞬时的航向角和航向角速度。加权系数k0在仿真实验的基础上经过试飞调整确定。实际飞行结果表明,采用上述航向基准修正规律,能有效消除直升机退出协调转弯时的航向抖动。
4 结论
实现协调转弯功能是直升机自动驾驶仪的重要设计任务之一。本文通过对飞机协调转弯过程的机理分析,确定了协调转弯控制律的结构和参数,给出了明晰的物理解释。从原理上说明了所设计协调转弯控制律的合理性,也对试飞调参具有实际参考意义。设计、仿真及试飞结果均显示,本文给出的协调转弯控制律合理、正确,完全满足该型直升机的协调转弯指标要求。本文所得结果对其他类型飞机的协调转弯控制律设计也具有借鉴意义。
[1]南卫生,杨一栋,熊 鑫.基于MFCS直升机协调转弯模态设计[J].海军航空工程学院学报,2004,19(2):217-220.
[2]Yu Xiang,Wang Xinmin,Li Yan.Design of the coordinated turning control for a hellicopter digital autopilot[C].proceedings of the 6th World Congress on Intelligent control and Automation,Dalian,China,2006.
[3]白浦江,王新民,余 翔,等.基于迭代LMI的直升机协调转弯控制律设计[J].测控技术,2008,27(7):86-88.
[4]邢小军,闫建国.直升机全包线协调转弯控制律设计及仿真[J].飞行力学,2011,29(1):42-45.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年8期)2021-11-24
兵器装备工程学报(2021年9期)2021-10-15
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年1期)2017-11-24
数码世界(2017年7期)2017-07-25
电子制作(2017年24期)2017-02-02
导航定位与授时(2016年1期)2016-03-16
汽车科技(2014年6期)2014-03-11