无人飞行器扩频角跟踪技术研究与应用
2013-09-19 10:18赵呈哲何源洁
无线电工程 2013年1期
赵呈哲,何源洁
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
直接序列扩频系统可以工作在负信噪比下,信号淹没在噪声中,因此具有很高的隐蔽性、抗干扰性、抗多径和抗截获的能力,在无人飞行器测控系统中得到广泛应用。单通道单脉冲角跟踪技术因其技术优点,同样广泛应用于飞行器测控领域。如何直接利用当前的扩频技术和跟踪技术,在不降低系统指标的前提下,实现对角度误差信号的提取,准确、及时地完成对飞行目标的测角跟踪,是无人飞行器测控系统需要解决的一个问题。
1 扩频角跟踪系统组成
对于单通道单脉冲跟踪体制,地面多喇叭定向天线和差网络输出一对方位、俯仰误差信号和和信号。射频误差信号和地面跟踪接收机输出的一对正交低频方波信号在地面站信道双工器内,完成0/π调制,然后与和信号耦合,再经过下变频,送给地面跟踪接收机,进行角误差的解算[1]。
地面跟踪接收机首先需要完成对伪随机码的解扩,之后是方位、俯仰角误差信号的同步解调,最后将解算出的数字角误差组帧,输出给伺服系统,实现对飞行器的跟踪测角,从而保证测控链路的畅通。扩频角跟踪系统组成框图如图1所示。

图1 扩频角跟踪系统组成
2 原理分析
在单通道扩频跟踪接收通道中,和路信号表示为[2]:

式中,V∑为和路信号强度;ωc为载波角频率;φ0为信号初相;n∑为和路的噪声分量;c(t)为扩频伪随机码序列;m(t)为调制数据。
误差信号表示为:

式中,VA、VE分别为对V∑的归一化方位、俯仰角误差电压;nA、nE分别为方位、俯仰支路的噪声分量。
2路差信号经过0/π调制,与和信号耦合,形成单通道的复合信号:

复合信号经低噪声放大、下变频和放大滤波后,信号的中心频率变为ω0,噪声为窄带高斯噪声,信号表达式如下:

式中,D(t)和D(t+90°)为正交的低频方波信号;nc(t)、ns(t)为带限白高斯噪声的同相和正交分量,双边功率谱密度为n0/2。
然后进入相关解扩单元,解扩后变为:

经载波跟踪后I支路输出信号为:

由于低频方波信号,频率一般为1 kHz左右,远低于数据速率,因此,角误差信息仍然保留在解扩后的信号中。将解调后的遥测基带信号m(t)与跟踪后的I支路信号再相乘,去掉数据得到:

再分别与本地D(t)、D(t+90°)同步处理,经低通滤波后得:

利用信号能量归一化得:

式中,PAO、PEO即为跟踪系统的角误差信号。
3 解决方案
3.1 扩频角跟踪系统问题分析
考虑无人飞行器测控系统角跟踪的应用条件,地面跟踪天线首先需要对目标进行搜索,捕获到飞行器的无线电遥测信号,同时地面跟踪接收机解算出角误差,输出给伺服设备,然后才能切换到无线电的自跟踪状态,实现地面跟踪天线对飞行器的闭环跟踪。
这种特殊的应用环境,对于扩频角跟踪系统,就需要地面跟踪接收机在天线主波束扫过飞行器的极短时间内,完成对伪码的捕获、跟踪并解算出角度误差电压,实现无线电跟踪环路的闭环跟踪。因此,地面跟踪接收机需要对扩频信号实现快速捕获和解扩。
对于较短伪随机码的扩频角跟踪系统,传统的伪码相位滑动解扩所需的时间也不长,可以满足跟踪系统对地面跟踪接收机的时延要求[3]。然而,随着扩频角跟踪系统中长伪随机码的选用,使得滑动相关解扩需要的时间变长。因此,对于扩频角跟踪系统,伪码的捕获、跟踪处理应当考虑其他的方式。
下面给出应用实例。信息传输速率20.48 kbps;信号形式:BPSK;伪随机码:256位平衡GOLD码;伪码速率:5.242 88 Mcps。地面跟踪天线采用工程中常用的C波段车载1.8 m余割平方赋形天线。天线波束3°,伺服机构的最大转动角速度为50°/s。地面跟踪天线扫过半个波束时需要的最短时间为:

通常,地面跟踪天线应该在扫过飞行目标的半个波束内完成闭环跟踪,因此,地面跟踪接收机输出数字角误差帧的时延必须小于0.03 s。考虑到跟踪接收机误差信号的解算同样也需要一定的时间,就需要对扩频信号实现快速解扩。
对于解扩系统,为了使得系统能够在信噪比较低的情况下完成对扩频信号的解扩,在解扩程序部分,中频能量累积之后增加了多倍的视频累积,进行信号的搜索、捕获判决,以提高解扩的灵敏度。均衡考虑性能的提升和硬件资源的消耗,选取8倍视频能量累积。
传统的解扩系统采用伪码滑动捕获的设计方法,如图2所示。通过调整伪码发生器,遍历伪码的所有相位,从而实现对扩频信号的捕获[4]。
对于传统的伪码滑动解扩,解扩的时延主要在伪码的搜索阶段,以搜索一个伪码周期,8倍视频累计为例,完成解扩所需要的时间可以近似为:

从时间上看,不考虑误差电压的解算,仅仅完成解扩所需要的时间0.1 s,已经远大于地面跟踪天线扫过半个波束所需要的时间0.03 s。这样,就会发生地面跟踪天线搜索到飞行器时,误差电压确还没有正常输出,从而丢失目标。因此,需要重新考虑解扩的信号处理方式,以降低解扩部分的处理时延。
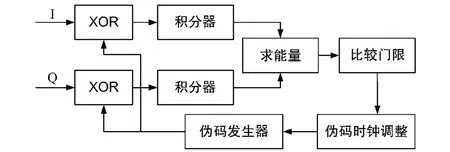
图2 伪码串行搜索捕获原理
3.2 快速解扩方案
考虑解扩部分的时延主要在伪码的搜索阶段,为了降低该处的时延,同时考虑硬件资源的消耗,选取伪码相位部分并行搜索的方式。伪码相位部分并行搜索捕获原理如图3所示。
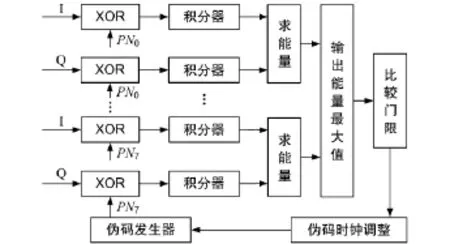
图3 伪码部分并行搜索捕获原理
例如,采用8路相位并行搜索的方式,8个支路的相位分别为 PN0、PN1、…、PN7;PN8、PN9、…、PN15;…;PN248、PN249、…、PN255。伪码时钟每调整一次,地面跟踪接收机可以同时完成8个支路伪码相位的并行处理,因此,搜索阶段所占用的时间为相位串行滑动的1/8。完成解扩处理所需要的时间可以近似为256/20 480=0.012 5 s。因此平均解扩时间约为0.012 5 s。
3.3 角误差解算
对解扩后的信号进行角误差电压的解算如图4所示。解扩后的对准支路I(k)和Q(k)数据,先进行相关运算,消除掉数据和频偏对误差电压的影响,然后积分抽取,对能量归一化,滤波,除去低频方波,最后再滤波,解算出角度误差电压U(e)[5]。
误差电压解算程序,除了最后一级的n级FIR滤波器,其他的处理的时钟都在几十kHz,故误差电压解算的处理时延都集中到最后一级低通滤波器[6]。通常这一级低通滤波器的处理时钟为10 kHz,n一般选取64,故误差电压解算的处理延时约为:

整个扩频角跟踪接收机误差电压解算的时延为:

小于0.03 s的地面跟踪天线扫过半个波束需要的最短时间。
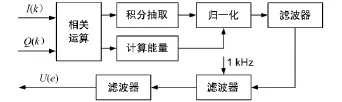
图4 角误差电压解算
4 结束语
通过在不同信噪比下对地面跟踪接收机解扩锁定时间的观察可以看出,采用伪码相位部分并行搜索,使得解扩锁定的时间与传统滑动解扩相比有了显著降低,而同时解扩的灵敏度没有受到影响。目前,单通道单脉冲扩频角跟踪系统已经成功地应用于多个工程中。在外场飞行过程中,角跟踪系统表现良好,性能稳定、可靠。
[1]李瑞榜.扩频信号跟踪测角技术研究[J].无线电工程,2004,34(1):31 -32.
[2]王丽韫,文运丰.直扩信号跟踪测角技术研究[J].无线电工程,2005,35(5):36 -38.
[3]耿 炎.基于直扩频技术的角跟踪设计与实现[J].无线电工程,2008,38(10):47 -49.
[4]查光明,熊贤祚.扩频通信[M].西安:西安电子科技大学出版社,1990.
[5]李瑞榜.地空高速数据链跟踪测角技术研究[J].无线电工程,2005,35(2):23 -25.
[6]丁玉美,高西全.数字信号处理[M].西安:西安电子科技大学出版社,2001.
猜你喜欢
河北大学学报(自然科学版)(2020年2期)2020-05-22
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
探测与控制学报(2018年2期)2018-05-09
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
学习月刊(2016年19期)2016-07-11
探测与控制学报(2015年4期)2015-12-15