
基于移动机器人无线传感网络数据采集方法研究
2013-09-27 09:26江苏第二师范学院数学与信息技术学院南京210013金陵科技学院信息技术学院南京210013
电子器件 2013年6期
(1.江苏第二师范学院数学与信息技术学院,南京210013;2.金陵科技学院信息技术学院,南京210013)
(1.江苏第二师范学院数学与信息技术学院,南京210013;2.金陵科技学院信息技术学院,南京210013)
针对传统的无线传感网络数据采集方法存在的能耗高、网络延迟时间长的问题,提出了一种基于移动机器人无线传感网络数据采集方法,此方法的基本思想是,首先选择一个合适的移动机器人作为族头,一定周期内的相邻节点的平均剩余能量会被移动机器人检测出来,同时整个网络节点的平均剩余能量也能被检测出来,移动机器人是否移动由这两个能量参数的大小决定的。随着机器人的移动,节点的路由也会相应的更新,然后重新选择移动机器人族头。测试结果表明,此方法能很好的降低传输延迟和节点能量消耗。
计算机网络;数据采集;移动机器人;传输延迟
目前,无线传感器网络(WSN)在很多领域应用非常广泛,路由算法是WSN中很重要一部分,传统的路由算法主要是基于能量有效性的路由算法,此算法虽然被广泛的用在密集部署的WAN中,但是对于节点比较稀疏的WAN来说却无法使用[1]。但是在对大气监测和城市空气质量检测时,为了降低成本,传感器的节点都是很稀疏的,所以各个节点直接的距离是很远的,节点之间的通信是个很难解决的问题[2]。如果想解决这个问题,就必须有合适的数据采集方法。
文章提出的基于移动机器人(MRS)无线传感网络数据采集方法就能够很好解决这个问题,使用移动机器人的移动实现数据采集,这样不但能减低网络延迟,而且能够节省传感器节点的能量。这样就能很好的解决了因为传感器节点稀疏带来的节点之间的通信问题和能量消耗太快的问题。
1 无线传感器网络模型
目前,应用最多最广泛的WAN模型使用的传感器节点在检测区域内都是很密集的,各个传感器节点都是在很小的范围内完成数据采集,同时把采集到的数据传输到数据采集点。在实际的应用当中,汇聚节点(Sink)就是所谓的数据采集点。数据的传输主要是各个节点自动组网通过多跳的方式进行[3]。
传感器节点、多个移动机器人和一个静态基站构成了文章中使用的WAN。数据的采集通过移动节点移动机器人完成。MRs的优点是数据存储和处理能力都非常强,受能量的影响可以忽略不计,维护也非常的方便,只需要充电和更换电池即可。MRs把传感器节点监测到的数据收集之后输出给静态基站[4]。根据实际的需要通常移动电话或者掌上电脑都可以用来代替移动机器人。
在文章的数据收集方式中,MRs在收集数据的同时,还担任了WSN中的族头。和传统的族头选定方法相比优势非常明显,最重要优势是能解决传统方法中因为少数族头节点能量消耗太快过早死亡的问题。从而可以避免网络失效的问题。
2 移动机器人设计
系统所用移动机器人是基于ARM设计的,采用低精度MEMS—IMU实现,这样可以提高移动的精度和可靠性。具体的设计硬件框图如图1所示。
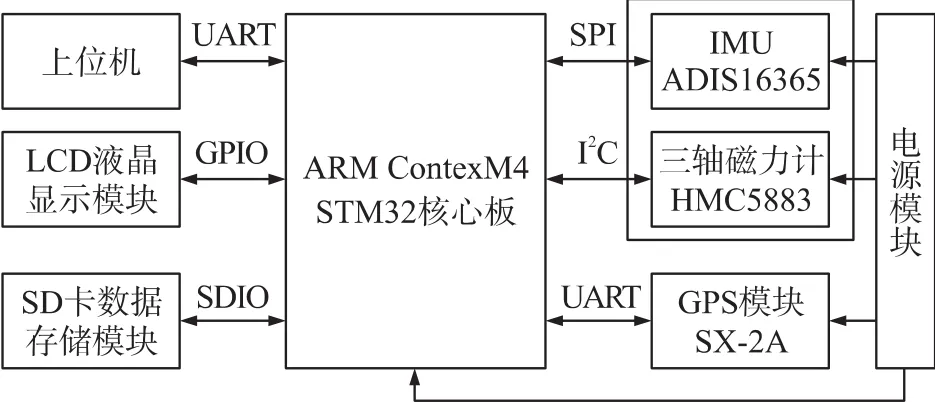
图1 移动机器人硬件框图
3 MRs数据收集方法
在网络运行时首先要进行族头的选择,静态节点之间路径最短的MR会被选为族头,MRs会每隔一个周期检测一次传感器节点的剩余能量,如果发现MR相邻传感器节点的剩余能量比网络的平均剩余能量低的时候,这个MR会自动开始随机移动,经过移动之后,传感器节点的路由会自动更新,相应的族头也会发生改变[5]。
3.1 族的生成
在每个静态节点都会混入一个族(MR是族头),MR族到达的路由信息传感器节点会自动获得。MR每次位置更换时都会生成一个新族,具体的流程图如图2所示。
BEACON是MRS广播族的更新消息,其中包括了MRs位置信息和跳数h。BEACON通过MR或Sink接收并且转发。传感器节点接收到该消息后会自动检测信号的强度SS,如果检测到强度没有接收信号强度阈值Rxthresh强,会检测该消息的MR是否是族头,是族头则会被从路径表中删除,同时会发送一个强度太低的报警信息LSS;如果SS比Rxthresh大,则会检测该信息的跳数h的情况,如果h大于或者等于hcurr(路由路径跳数),此信息会被抛弃,相反,路由表会被更新,同时发送生成族的信息CLU_CFG。此时MDC就成为BEACON的新族头[6]。
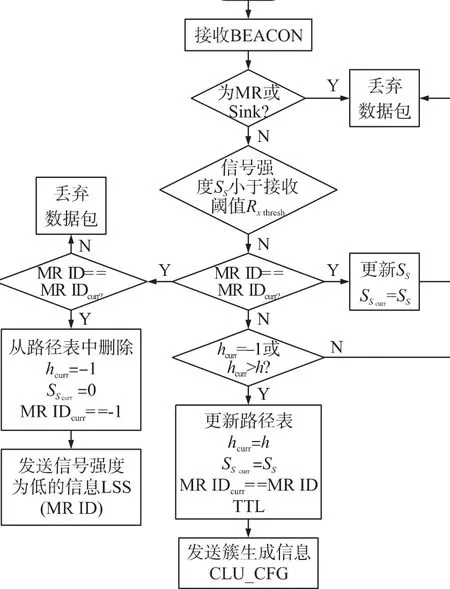
图2 族生成流程图
3.2 族的保持和更新
一些特殊的节点(距离MRs单跳节点)因为要转发其他节点的数据包,所以能量消耗非常快,这样会导致此节点提前死亡,从而影响整个网络的寿命。为了避免这种情况的出现,需要通过MRs的定期移动减缓这传感器节点的能量消耗[7]。
设Er是剩余能量,hm是跳数,MRs相邻传感器节点的平均剩余能量可表示为:
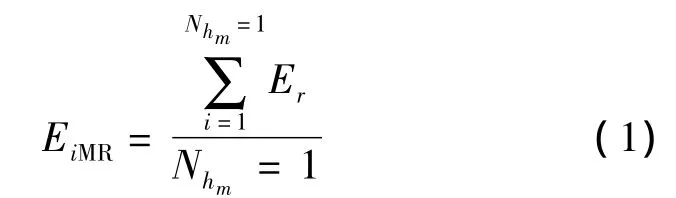
式(1)中Nhm=1是和MR相距跳数是1的节点个数。
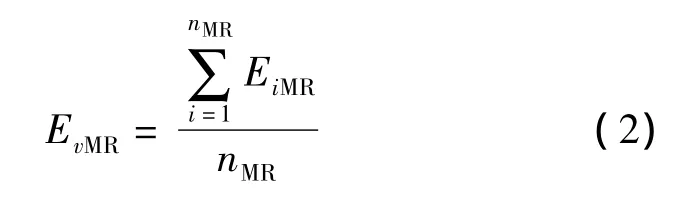
设检测区域中心 MR当作 MR Leader。MR Leader每两个周期会接收一次MRs相邻节点的平均剩余能量EiMR,则所有EiMR平均值可以通过MR Leader计算出来:式(3)中,nMR是网络中MRs的数量。
如果EiMR的值大于或者等于EvMR的值,MR不会移动,相反则会自动移动。
3.3 MRs的移动方式
MRs能否按要求收集WSN中的数据,其移动的方式是很重要的问题。每个传感器节点的能量消耗都受MRs移动的影响。文章中MRs的移动方式和Adhoc网络移动节点的移动方式非常的相似。目前应用比较广泛的移动方式主要有两种,一种是移动方向不受网络运行的影响,另外一种是移动方向是随机的,但是受相邻节点平均剩余能量的影响非常大。这两移动方式的缺点是如果路径是固定的,这样会出现个别节点能量消耗太快的问题,如果移动方式是随机的,会出现在某个局部区域内能量太高,从而别的区域能量缺乏的问题。为了解决这些问题,文章应用的是范围可控的随机移动方式,此种方式的核心思想是,首先把需要监测的区域平均分成n个区域,在这些n个区域中分别放入1个MR,并且这些放入的MR只能在固定的一个区域内随机移动。所有的MR移动的方向和路径受相应的一个区域网络运行情况的控制。这样就能避免因为大量MRs聚集在同一片区域而造成相应区域能量很高的问题,节省了节点能量,网络的生命周期也得到的延长[8]。
具体的移动方向模型如图3所示。
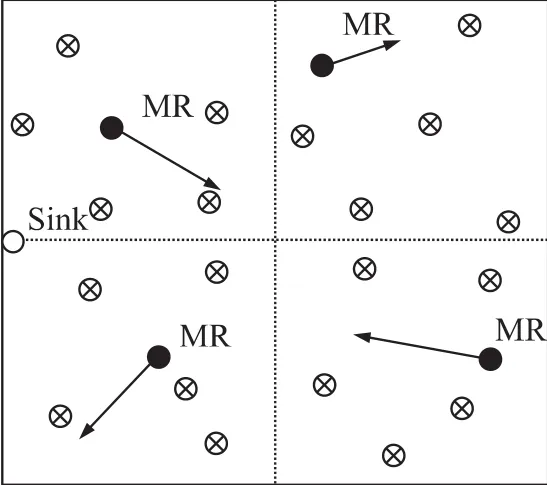
图3 MR范围限定的随机方向移动模型
图3中的传感器网络包括1个Sink节点、4个MRS和传感器节点若干。图3中的监测区域平均分成4个区域,每个MR只能在相应的区域内随机移动。
3.4 数据传输
数据传输的路径通过局部路径选择算法实现,此种方法的优点是只需相邻节点和MRs的值已知就能完成路径的选择。数据的传输使用重要信息优先转发、冗余信息后转发的方式,这样就能大大降低网络延迟。设定一个参数代表信息的优先转发权,在不同的WAN中,优先转发权的算法是不一样的。文章中把WSN分成两类,这两类分别是检测紧急、特殊事件的WSN和检测平均水平的WSN。检测紧急、特殊事件的WSN计算事件的优先权可表示为:

检测平均水平的WSN计算事件的优先权可表示为:

如果优先转发权小于一个固定值时,相应的事件会被删除。固定值是根据实际情况确定的。如果某个事件的生存时间超过一个固定值时,相应的事件也会被删除。在实际的应用当中,网络的延迟容忍度决定了固定值[9]。所谓的网络延迟容忍度就是此网络延迟的一个极限值,如果网络的延迟时间不超过网络延迟容忍度网络会正常运行,相反如果网络的延迟时间不超过网络延迟容忍度,网络就会进行自检处理。不同网络的延迟容忍度是不一样的,网络的延迟容忍度是可以预先直接设定的。
4 测试结果
设定一个随机分布50个节点和4个MRs的正方形的区域,通过NS-2平台进行1 000 s的仿真。具体的仿真参数如表1所示。

表1 参数值设定
通过两个场景进行仿真,传统的有1个静态Sink节点,文章中的方法引入4个MRs,两个场景中均有50个传感器节点。结果通过awk程序分析出网络的延迟数据,并通过绘图工具绘制出了延迟曲线。
图4中的(a)、(b)分别是全局延迟曲线和延迟时间小于0.3 s的局部曲线。文章中方法的网络数据传输延迟曲线如图5所示。
通过图4和图5可知,基于MRs的网络延迟大大低于传统方法的数据传输延迟。传统方法运行650 s,延迟时间为6 s,本文方法的网络延迟低于0.05 s。
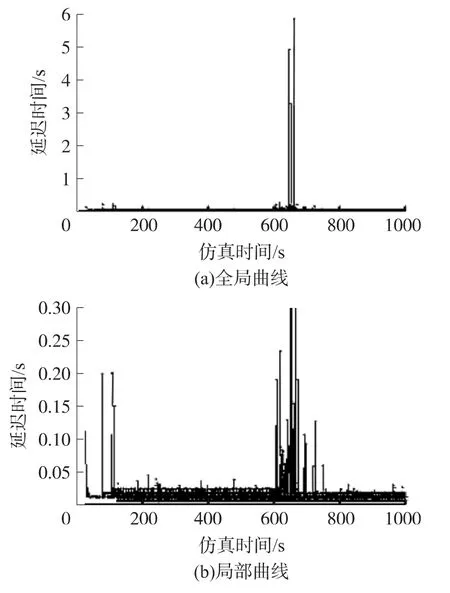
图4 传统数据传输延迟曲线

图5 基于MRs的网络延迟曲线
5 结论
文章提出了一种基于移动机器人无线传感网络数据采集方法,此种方法解决了稀疏WSN中传感器节点之间通信代价太高的问题。经过测试结果可知,和传统的WSN数据收集方法相比,此方法可以很好的降低数据传输延迟,同时也大大降低了汇聚节点周围节点的能量消耗。从而使整个网络的生命周期大大延长。
[1]彭宇,王丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011,25(5):389-399.
[2]邬学军,孟利民,华惊宇,等.基于能量控制的无线传感网络最优化算法研究[J].传感技术学报,2011,24(3):436-439.
[3]王小平,罗军,沈昌祥.无线传感器网络定位理论和算法[J].计算机研究与发展,2011,48(3):353-363.
[4]韦然.无线传感器网络节点的设计与实现[J].电子科技,2012,25(1):31-35.
[5]王新忠,顾开新,陆海燕.基于无线传感的丘陵葡萄园环境监测系统研究[J].农机化研究2011,33(11):191-194.
[6]吴超,吴明赞,李竹.基于HFSS的无线传感器网络节点微带天线设计与仿真[J].电子器件,2012,35(1):26-29.
[7]邓彬伟,黄光明.无线传感器网络移动节点辅助定位算法[J].仪器仪表学报,2011,32(3):563-570.
[8]王焱,单欣欣,姜伟.无线传感网络中移动节点定位技术研究[J].传感技术学报,2011,24(9):1326-1330.
[9]吕宏,黄钉劲.基于ZigBee技术低功耗无线温度数据采集及传输[J].国外电子测量技术,2012,31(2):58-60.
基于移动机器人无线传感网络数据采集方法研究*
赵 鹏1*,孙 玫1,钱海忠2,明朝辉1
Wireless Sensor Networks Based on Mobile Robot Research Data Collection Methods*
ZHAO Peng1*,SUN Mei1,QIAN Haizhong2,MING Zhaohui1
(1.School of Mathematics and Information Technology,Jiangsu Second Normal University,Nanjing210013,China; 2.School of Information Technology,Jinling Institute of Technology,Nanjing211169,China)
Traditionalwireless sensor networks for data collection methods have problems of the high energy consumption,and the long network latency,the article presents awireless sensor network data collectionmethods based onmobile robot.The basic idea of thismethod is to select firsta suitablemobile robot as a group header,the average residual energy of adjacent nodeswithin a certain period can be detected by themobile robot.The average residual energy of the all network nodes can also be detected.The working of the mobile robot is decided by the sizes of these two energy parameters.As the robotmoves,the routing nodes will be updated accordingly,and then themobile robot reselects the new family head.Test results show that thismethod can reduce the transmission delay and node energy consumption.
computer network;data collection;mobile robots;propagation delay
10.3969/j.issn.1005-9490.2013.06.029
TP212.9;TP24;TP274 文献标识码:A 文章编号:1005-9490(2013)06-0881-04
项目来源:省部共建实验室基地项目开放课题项目(9011311);江苏省属高校自然科学研究项目(12KJD520004);江苏第二师范学院十二五规划课题项目(Jsie2012yb04,Jsie2011qz05,Jsie2011yb18);江苏第二师范学院教学改革研究课题项目(Jssyjg2013yb04)
2013-06-14修改日期:2013-08-25
EEACC:6150P;7210G
赵 鹏(1976-),男,汉族,江苏泰州人,江苏第二师范学院,讲师,暨南大学硕士,研究方向为形式化验证、物联网技术,jiangsunanzhaopeng@163.com;


钱海忠(1977-),男,汉族,安徽休宁人,金陵科技学院,讲师,南京邮电大学博士,研究方向为传感器网络,hzhqian@163.com;
孙 玫(1961-),女,汉族,江苏南通人,江苏第二师范学院,副教授,东南大学硕士,研究方向为软件质量、物联网技术,sunmeinew@126.com;


明朝辉(1978-),男,汉族,江苏南京人,江苏第二师范学院,副教授,南京航天航空大学博士,研究方向为智能交通系统、复杂网络,sunmoon101010 @163.com。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
北京航空航天大学学报(2022年6期)2022-07-02
无线互联科技(2021年4期)2021-04-21
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
制造技术与机床(2017年3期)2017-06-23
中国舰船研究(2014年6期)2014-05-14
