基于容错控制的电动助力转向故障诊断系统设计
2013-09-28 04:57胡延平赵林峰
合肥工业大学学报(自然科学版) 2013年1期
胡延平, 赵林峰, 赵 斌, 高 明
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.株洲易力达机电有限公司,湖南 株洲 412002)
0 引 言
目前汽车电动助力转向系统(EPS)研究的主要内容为控制策略和电子控制单元(ECU)的设计,其可靠性是汽车安全行驶的关键[1-2]。在EPS控制系统中单纯地通过加大元器件保险系数的做法,几乎不可能实现系统的高可靠性,并且成本也会很高[3]。提高EPS可靠性的一个很重要的措施是在兼顾系统其他性能要求的同时,合理、经济地配置元器件,采用容错控制策略,针对传感器故障情况设计控制器。控制策略的实现必须以一个稳定、可靠的电子控制单元为基础,随着先进控制理论的深入研究,传统的单片机已不能满足运算速度要求,而采用高性能微处理器已成为设计汽车电子控制单元的趋势[4]。
1 EPS动力学模型
本文研究了电动助力转向系统容错控制,设计了基于32位ARM微处理器的EPS故障诊断系统。
EPS主要由转矩传感器、车速传感器、电动机及电磁离合器、减速机构和ECU等组成。为了建立系统动力学微分方程,将动力学模型简化,如图1所示。
EPS可分割成转向盘转向轴、电动机、齿轮齿条及转向前轮4个组件,这4个组件的运动变量分别是转向盘转角位移θh、电动机转角位移θm、齿条平移位移xr及转向前轮转角位移δ。对各组件进行受力分析,建立运动方程,然后连立各组件的运动方程,得到EPS的状态方程。

图1 EPS动力学模型
EPS系统状态空间输入为驾驶员的操纵转矩Td、电动机电流ia及转向阻力矩T1。EPS系统状态空间的输出为辅助转矩Ta、转向柱转矩Tc、齿条位移xr及电动机电流ia。电流传感器系数为Ki,系统的其他输出由选用的传感器的多少来决定,在这里选择Tc、ia为反馈信号。
定义系统变量为:

输出变量为:

输入变量为:

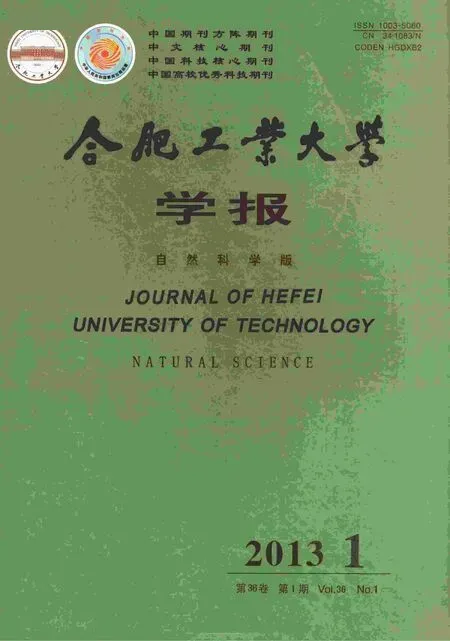
EPS的状态方程[5-6]为:
2 容错控制策略
2.1 容错控制目标
(1)较大的随车速变化的助力。
(2)快的响应速度。
(3)用尽量少的传感器。
2.2 基于输出反馈的完整性EPS控制器
EPS系统可靠性的一个重要措施是在系统设计时兼顾助力和回正等性能要求的同时,合理地配置传感器,采用容错控制策略,针对传感器故障情况设计控制器,实现对故障的不敏感,从而保持系统稳定。
而被动容错控制采用固定的控制器确保闭环系统对特定的故障不敏感,保持系统的稳定。被动容错控制大致可以分成可靠镇定、完整性与联立镇定3种类型。
完整性问题也称为完整性控制,所谓完整性是指系统中1个或多个部件发生故障时,系统利用余下的部件仍可使系统稳定工作并保持规定性能的特性[5]。
采用完整性设计,可以在很大程度上解决因传感器硬件冗余容错方式而产生的系统成本过高、难以推广应用的难题[6-9]。
本文针对EPS系统,采用了基于输出反馈的完整性设计。
考虑线性系统为:

设A、B可控,A、C可观,采用输出反馈控制律为:

考虑传感器失效,定义一个开关矩阵如下:

将传感器失效矩阵(4)式放在矩阵C和x之间,则出现故障后的闭环系统为:

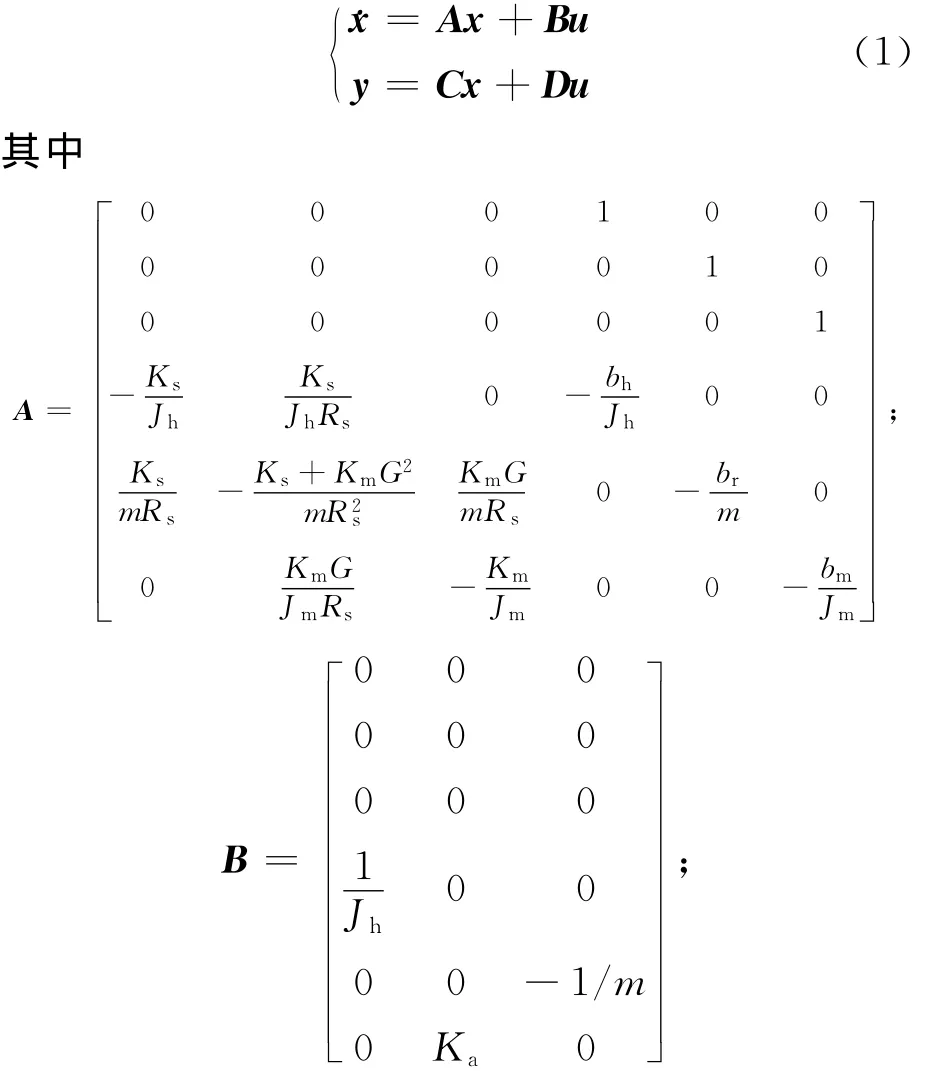
基于传感器故障在输出反馈作用下的控制律目的,选取合适的控制律k,使闭环系统在故障情况下具有完整性,控制策略框图如图2所示。
图2 EPS容错控制系统逻辑框图
矩阵A的所有特征值均在具有α稳定度的半平面区域Sα中的充要条件,是存在一个对称正定矩阵X[8-9],使得:

任意2个适维矩阵X、Y和任意实数γ>0,有

当γ=1时,有

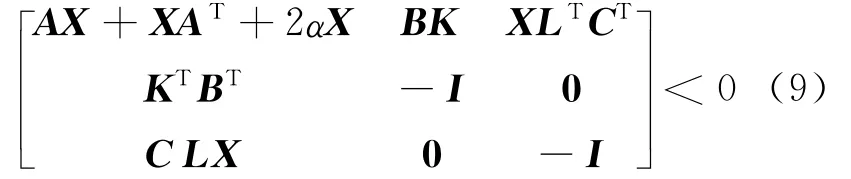
在传感器失效情况下,故障闭环系统(2)式的所有极点均在具有α稳定度的半平面区域Sα中的充分条件,是存在一个对称正定矩阵X,对任意的传感器故障L,满足线性矩阵不等式:
2.3 仿真分析
针对系统(1)式,取 Ks=115,bh=0.3,Jh=0.01,Rs=0.007783,m=24,Km=125,G=7.25,KT=0.5,br=6653,Jm=0.0019,Ke=0.1,bm=0.00334,Ka=0.5,R=0.1,Ki=0.4,α=-0.5。其中正常为L0=diag{1,1},故障1为L1=diag{1,0},故障2为L2=diag{0,1},故障3为L3=diag{0,0}。将L0、L1、L2,L3代入(9)式,联立矩阵不等式得:

最后得到不同传感器故障下闭环系统极点分布,见表1所列。
取Td=5.5,T1=210.5,t=0.5,得Tc仿真结果,如图3、图4所示。
在Td=5.5时,Tc稳定在4.5左右。当故障1发生时,电流传感器故障,Tc值大于正常值;当故障2发生时,转矩传感器故障,Tc值小于正常值。

表1 不同传感器故障下的闭环系统极点分布
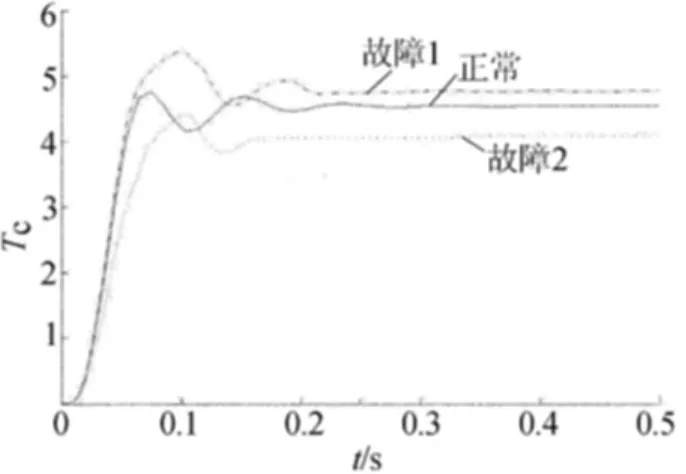
图3 不考虑容错控制的仿真结果
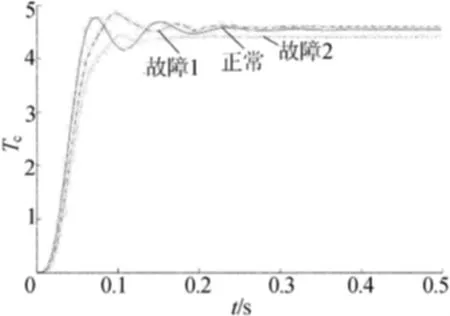
图4 考虑容错控制的仿真结果
3 试 验
(1)EPS故障诊断系统硬件结构设计。为了安全,EPS控制器容错设计以满足某些传感器部件失效时,系统不丧失最基本的功能,或进一步实现故障系统的性能最优,同时提醒驾乘人员安全返回维修站维修[10]。所以,设计的EPS硬件电路中考虑了多种方式进行故障提醒和故障代码的传输,EPS硬件电路如图5所示。
(2)故障诊断程序设计。EPS容错控制程序依次设置了对ECU故障的诊断、自诊断芯片内部故障的诊断、对主副转矩传感器故障诊断以及对转矩传感器进行容错控制[11]。实验时,人为地制造转矩传感器故障,可实现故障灯报警,当转动转矩传感器至最大时也会收到报警信号,LED灯闪烁和蜂鸣器蜂鸣,同时按下发送键发送故障代码,仅显示有12故障,如图6所示。通过TJA1050T芯片实现PC和单片机以及CAN逻辑判断仪的串口连接,利用CAN逻辑分析仪接受故障代码。采用容错控制时,试验采集的操纵转矩如图7所示。
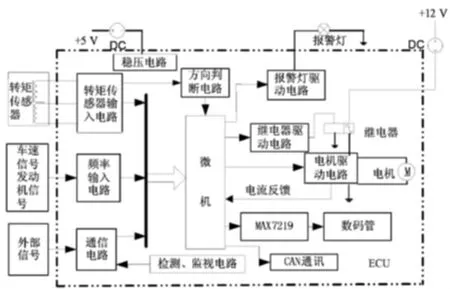
图5 EPS故障诊断系统框图
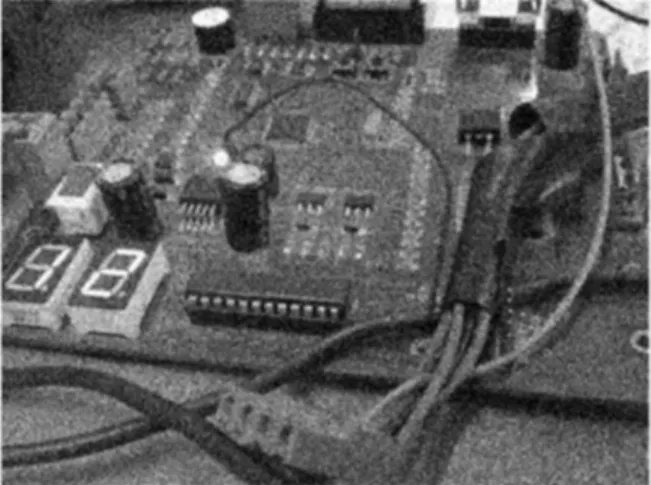
图6 故障通过数码管显示
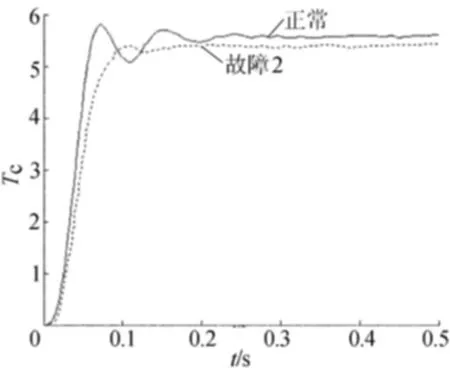
图7 采用容错控制的试验结果
4 结 论
(1)转矩传感器故障对于系统输出的影响相对较大,不考虑容错控制时系统超调较大,输出与正常情况下输出的偏差较大。
(2)考虑容错控制时系统超调较小,输出与正常情况下输出的偏差较小。
容错控制实验结果表明,当转矩传感器故障,Tc值小于正常值,输出与正常情况下输出的偏差较小,从而可以有效提升系统性能,并可实时显示系统故障。
[1]Choi C,Lee W,Kim J,et al.Failure modes investigation and analysis of electric power steering system with PMSM drives[J].SAE,2009(1):296-300.
[2]赵林峰,陈无畏,秦明辉,等.基于转向轻便性及回正性能设计的EPS应用研究[J].机械工程学报,2009,45(6):181-187.
[3]谢 刚,殷国富,田大庆.电动助力转向系统的传感器容错控制技术研究[J].中国机械工程,2006,17(14):1532-1535.
[4]赵林峰,陈无畏,刘 罡.电动助力转向系统全工况模型建模及试验验证[J].农业机械学报,2009,40(10):1-4.
[5]王福利,张颖伟.容错控制[M].沈阳:东北大学出版社,2003:5-6.
[6]王其东,杨孝剑,陈无畏,等.电动助力转向系统的建模及控制[J].农业机械学报,2004,35(5):1-4.
[7]徐建平,何 仁,苗立东,等.电动助力转向系统回正控制算法研究[J].汽车工程,2004,26(5):557-559.
[8]宗 臻,王诗宓.基于LMI的输出反馈鲁棒完整性控制器设计[J].控制理论与应用,2005,22(5):682-686.
[9]俞 立.鲁棒控制-线性矩阵不等式处理方法[M].北京:清华大学出版社,2002:8-9.
[10]黄李琴.电动助力转向系统关键技术的研究与开发[D].北京:清华大学,2002.
[11]杨云虎,鲁照权,方 敏.具有保性能的容错控制[J].合肥工业大学学报:自然科学版,2005,28(3):286-291.
猜你喜欢
英语世界(2022年9期)2022-10-18
金桥(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
四川冶金(2018年1期)2018-09-25
商周刊(2017年17期)2017-09-08
中国音乐教育(2017年4期)2017-05-20
通信电源技术(2016年1期)2016-04-16
中国男科学杂志(2016年9期)2016-03-20
电机与控制应用(2015年3期)2015-03-01
河南科技(2014年18期)2014-02-27