室内GPS发射器角度校准装置的设计与分析
2013-09-28 04:58孙安斌马骊群曹铁泽王继虎甘晓川李洋
计测技术 2013年6期
孙安斌,马骊群,曹铁泽,王继虎,甘晓川,李洋
(中航工业北京长城计量测试技术研究所,北京 100095)
0 引言
室内GPS是美国Arc Second公司开发的一种大尺寸测量系统。由于其具有测量范围大、测量精度高、支持多用户等独特优势,以美国波音公司为代表的很多大型精密工业生产商都采用了该系统。近年,在卫星装配、飞机总装及科研领域国内开始引入室内GPS系统,由于其测角误差直接影响到系统的综合测量精度,因此开展室内GPS的角度校准研究对室内GPS综合测量误差的评定及室内GPS的推广应用具有重要基础意义。本文简述了室内GPS测量系统测量空间点坐标的不确定度来源,根据室内GPS发射器的技术指标,提出了装置的设计要求,研制了一套室内GPS发射器角度校准装置,分别分析了俯仰角和水平角校准装置的误差源及所能达到的准确度,最后通过实验验证了装置的精度。
1 技术要求
由于室内GPS测量得到的是水平角和垂直角的信息,要确定一个目标点的三坐标值,至少需要2台室内GPS采用三角交汇法确定,其原理如图1所示[1]。

图1 前方交汇示意图
对P点坐标的三个分量分别求偏导并简化,获得P点坐标三个分量上的不确定度,由此分量可知测量点空间坐标测量的不确定度来源于室内GPS的测角的不确定度,因此要评定整个系统的精度就要首先确定单个室内GPS发射头的测角准确度[2-3]。
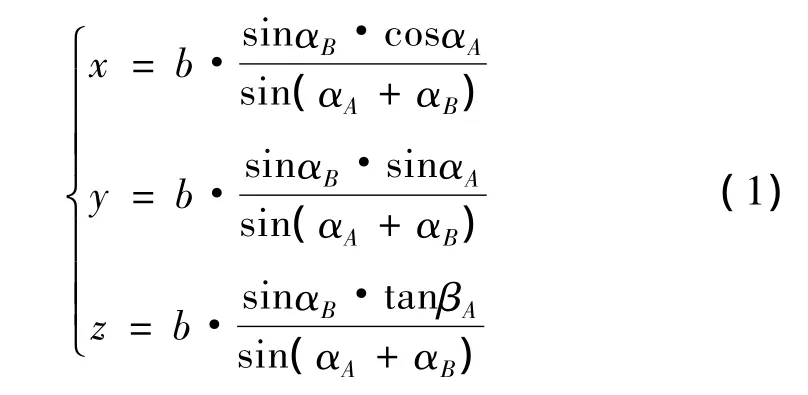
P点坐标为对 (1)式求偏导并简化则可得到P点坐标三个分量上的不确定度

根据室内GPS的测量原理,其水平角和垂直角的测量不确定度是不一样的,设定测量范围≤10 m,则室内GPS发射器标定的指标:俯仰角的测量不确定度为 2.4″,水平角的测量不确定度为 3.0″[4-5]。为实现室内GPS发射器的角度的综合校准拟采用类似于电子经纬仪的校准方法,结合多目标和转台实现其水平角及俯仰角的校准。根据校准需要并结合实际条件,要求室内GPS角度校准装置的测量不确定度为
俯仰角测量不确定度:U=1.0″,(k=2)
水平角测量不确定度:U=1.6″,(k=2)
测量范围:
俯仰角测量范围:-30°~+30°
水平角测量范围:-360°~+360°
2 系统设计
2.1 整体方案
根据室内GPS发射器的角度校准的技术要求,角度校准装置主要由精密转台系统、同轴调整系统、竖轴激光导轨系统组成,如图2所示。其中精密转台能够直接对发射器的水平角进行校准,而俯仰角则利用三角形的边长间接给出,竖轴激光导轨系统能够在竖直方向生成多个经精确测得的目标定位点,发射器中心到竖直激光导轨的垂直距离事先标出后,其俯仰角根据三角形边长求出。同轴调整系统能够实现发射器旋转轴与转台旋转轴间的快速同轴调整。整个系统中转台中心距导轨运动轴线1.73 m,竖轴激光导轨的有效行程为2 m,保证满足±30°俯仰角校准的需要。

图2 室内GPS发射器角度校准装置图
2.2 俯仰角测量装置设计
室内GPS的俯仰角测量需利用三角形的边长间接给出,传统方法是事先标出竖直排列的多个目标定位点在垂直方向的距离,并测出发射器中心到目标定位点的垂直距离,其俯仰角通过三角关系间接获取。采用单一接收器进行着点测量时,目标点在竖直方向上距离准确度受到测量及装配精度的限制一般在0.01 mm之上,若发射器距离目标点2 m,则因接收器在竖直方向上的定位误差引入的俯仰的测量误差在1″左右,不能满足俯仰角的校准需求。本俯仰角校准系统采用竖轴激光导轨来解决目标定位精度差的问题。该系统利用干涉仪实现竖直方向上的多目标点位的精确距离测量,其测量误差可达到0.005 mm,由此引入的测角误差为0.6″,因此竖轴激光导轨的引入,提高了俯仰角的校准精度。竖直导轨系统如图3所示,竖轴激光导轨具有水平调整功能,且导轨直线度能够根据测量值进行调整。考虑到成本及安装空间的限制,导轨有效行程设计为2 m,为此发射器距离导轨的距离设计为1730 mm,满足俯仰角±30°的校准需求。

图3 竖轴激光导轨系统
利用该系统进行俯仰角及水平角的校准须将发射器放置到转台中心上,需要发射器的同轴调整。实现同轴调整的传统方法是将发射器调平后再打表调整,但此种方法调整费时,且测量准确度受限,为此设计了同轴调整装置实现发射器的同轴调整。该装置利用基于PSD的同轴调整系统实现同轴调整,该系统包括四部分:一是由三个定位基准盒组成的同轴调整基准;二是高精度转台;三是五维调整机构;四是安装在被测件旋转轴上的激光定位器。室内GPS同轴调整装置的同轴调整工作方式如图4所示。同轴调整过程如下:同轴调整时激光定位器安装到室内GPS的旋转头上并锁紧,后将安装好激光定位器的室内GPS安装在五维调整机构上;当室内GPS旋转头旋转时,两个激光定位器会扫出以室内GPS旋转头为轴线的两个锥面,此时由于室内GPS旋转轴与转台转轴不重合,激光不会同时打在六个PSD的零位上,通过调整五维调整机构,使得六个PSD数据输出为零,即能保证室内GPS转轴与转台转轴重合,调整完成后取下激光定位器,便可开展室内GPS的角度校准工作。经试验测得其同心调整误差为0.004 mm[5],同轴调整误差为10″。
利用此方法进行同轴调整时,俯仰角校准系统主要误差来源于发射器与竖轴导轨的不平行误差、发射器与转台的偏心误差、竖轴导轨的定位误差及竖轴导轨的直线度变化误差。考虑传统情况有:
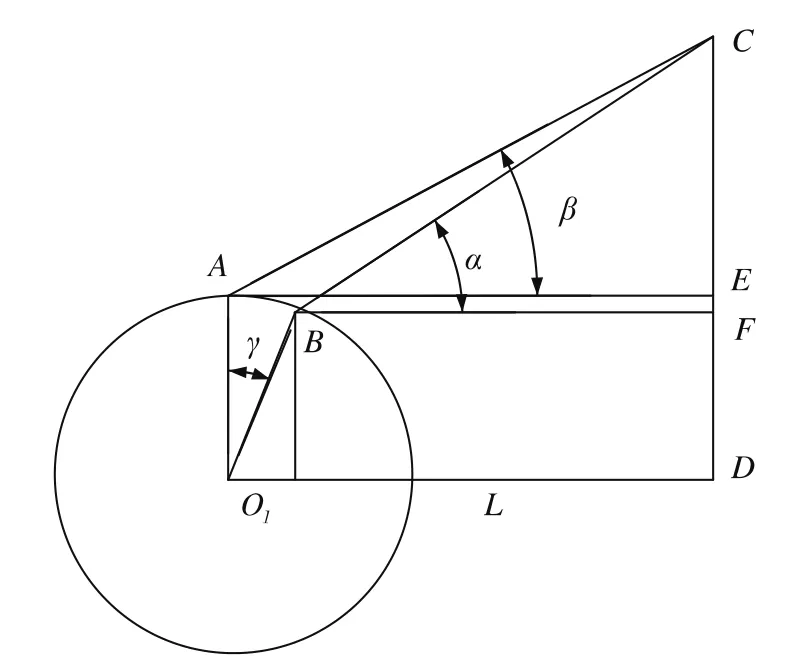
图4 发射器旋转轴的倾斜误差
1)发射器与竖轴导轨的不平行误差引入的不确定度分量
竖轴导轨与发射器的不平行误差主要是发射器旋转轴的倾斜误差造成。倾斜对俯仰角影响最大时的情况如图4所示,设AO1为发射器的红外信号发射点到同轴调整点的距离,BO1为倾斜后的位置,CD为理想情况下导轨的位置,γ为发射器的倾斜误差,则最大极限误差
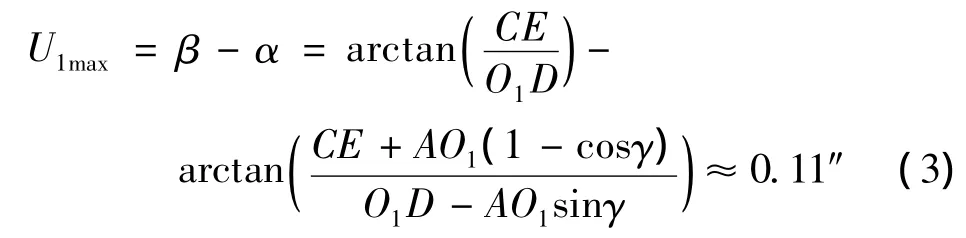
考虑到实际情况,取CE=1000 mm,AO1=50 mm,O1D=1730 mm,γ=10″,同轴调整误差,则取k=2,由此引入的不确定度为u1≈0.06″。而采用传统方法,倾斜角度受到调平用传感器精度的限制,如采用水平调平,其误差为1',则引入的测量不确定度为u'1≈0.38″。
2)发射器与转台的偏心误差引入的不确定度分量
偏心误差是在调整发射器旋转轴与转台旋转轴同轴的过程中未能调整到位,而造成的两轴在与转台旋转轴垂直的平面上的偏差,则有最大极限误差

新同轴调整装置有e=0.004 mm,取k=2,则由此引入的不确定度为u2≈0.11″。而采用传统打表方法,同心调整误差为0.01 mm,引入的不确定度为u'2≈ 0.26″。
3)竖轴导轨的定位误差引入的不确定度分量
竖轴导轨的距离测量误差为0.005 mm,且服从均匀分布,则其引入的俯仰角测量不确定度为

4)竖轴导轨的直线度变化误差引入的不确定度分量
如图5所示,某一位置直线度的改变可以看作是在该位置上基本长度L(L=2 m)的改变,设直线度的改变量为0.01 mm,考虑最大俯仰角(α=30°)的情况,由此引入的最大测角误差为

取k=2,由此引入的不确定度为u4≈0.30″。

由此得到的扩展不确定度为U=2uc=0.96″(k=2)。满足设计上的要求。

图5 发射器旋转轴的倾斜误差
而传统方法的合成标准不确定度

由此得到的扩展不确定度U=2uc=1.30″(k=2)。因此利用传统方法实现同轴调整的精度不能满足俯仰角的校准需要。
2.3 水平角测量装置设计
水平角测量装置采用精密转台直接对发射器的水平角进行标定,水平角测量与俯仰角测量共用同轴调整装置实现发射器与转台的同轴调整,如图6所示,接收器放置在竖轴激光导轨上。利用转台实现发射器水平角校准的误差主要来源于转台本身的分度误差、转台的定位重复性误差、发射器与转台之间的调整误差及接收器的定位重复性误差。为满足水平角校准的需要,选用转台的分度误差为u1=0.5″,重复性定位误差为u2=0.5″。调整误差主要包括偏心误差和倾斜误差。

图6 同轴调整系统
1)发射器与转台之间的调整误差引入的不确定度分量
发射器与转台之间的调整误差包括倾斜误差和偏心误差。倾斜误差引入的不确定度分量:Δθ=β-α≈,其中α为发射器水平角的角度值,β为转台的角度值,则当,…时,有,为二次小量,倾斜误差为γ=10″时有Δθmax=0.0001″,故发射器旋转轴的倾斜误差在发射器水平角的校准中可忽略。
偏心误差如图7所示,室内GPS接收器距离转台中心O1的距离为R,转台中心与发射器转轴的偏心距为e,转台对应被测点P的水平角为θ,发射器对应被测点P的水平角为θ+Δθ,Δθ则为偏心距带来的角度偏差。
据正弦定理有

因为Δθ很小,则有
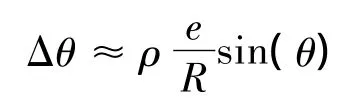
若e=0.004 mm,R=1732 mm,则u3= Δθmax≈0.48″。
2)接收器的定位重复性误差引入的不确定度分量
传感器据发射器距离为1730 mm,传感器定位重复性为0.008 mm,则不确定度可估计为

上述不确定度分量的概率分布均设定为均匀分布,合成标准不确定度为

由此得到估计的扩展不确定度为:U=2uc≈1.5″(k=2),满足设计要求。
图7 室内GPS发射器偏心误差影响
3 试验验证
利用经纬仪验证装置的精度,转台顺时针和逆时针各旋转一周,每30°记录一次经纬仪的水平角和俯仰角的读数,取每测回顺时针和逆时针测量的平均值作为该点的测量值。根据模型对该测量结果进行补偿。补偿后的误差曲线分别见图8,9,10。以上结果表明俯仰角的测量误差小于0.9″,水平角测量误差小于1.6″,均达到技术指标的要求。

图8 俯仰角误差补偿后的误差曲线
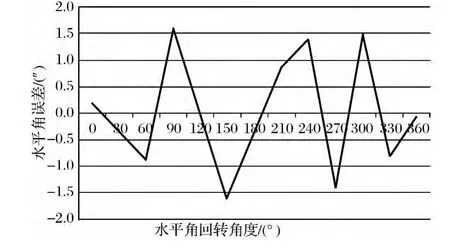
图9 第一测回误差补偿后的误差曲线

图10 第二测回误差补偿后的误差曲线
4 结论
本文结合室内GPS测量原理及技术要求,研制了一套室内GPS发射器的角度校准装置,并从理论上分析了装置的可行性,通过试验验证了该装置的精度满足室内GPS校准的需要,该装置的俯仰角的测量误差小于0.9″,水平角测量误差小于1.6″满足了设计要求,并能够同时实现室内GPS的俯仰角及水平角的校准;研制的同轴调整系统创新性的采用了六个PSD作为同轴调整基准,利用安装在室内GPS上的激光定位器结合五维调整机构实现同轴调整,该同轴调整精度高、调整方便。不仅适用于室内GPS还适用于跟踪仪等设备与转台间的同轴调整。
[1]耿磊.室内测量定位系统测角精度分析及补偿方法研究[D].天津:天津大学,2011.
[2]Muelaner J E,Wang Z,Jamshidi J,et al.iGPS - an initial assessment of technical and deployment capability[C]//Proceedings of the 3rdInternational Conference on Manufacturing Engineering.Chalkidiki,Greece:ICMEN,2008.
[3]Muelaner J,Wang Z.Study of t1he uncertainty of angle measurement for a rotary-laser automatic theodolite(R-LAT)[J].Proc IMechE,2009,223(1):100-102.
[4]James M Cobb.Infrared GPS:Technology Application by Manufacturing Research& Development[C]//Coordinate Measuring Systems Conference.2002.
[5]Error Budget and Specifications.[2013-08-20].http://www.arcsecond.com.
[6]李倩,孙安斌,马骊群.角度校准中不规则旋转体同轴调整方法 [J].计量学报,2012,33(S1):13-16.
[7]李庆祥,王东生,李玉和.现代精密仪器设计 [M].北京:清华大学出版社,2004.
[8]孙安斌,马骊群,曹铁泽,等.室内GPS发射器角度校准装置的研制 [J].计量学报,2013,34(5):406-409.
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
家庭影院技术(2021年3期)2021-05-21
冶金设备(2019年6期)2019-12-25
中国特种设备安全(2019年7期)2019-09-10
兵器知识(2019年1期)2019-01-23
汽车维护与修理(2018年3期)2018-12-07
制造技术与机床(2018年8期)2018-10-09
小猕猴智力画刊(2018年7期)2018-08-08
新能源科技(2018年10期)2018-02-15
动漫星空(兴趣百科)(2017年9期)2017-10-30