充磁导致的超高速永磁同步电机不平衡磁拉力
2013-09-30 09:29李艳明谢清明
北京航空航天大学学报 2013年6期
李艳明 郭 宏 谢清明 钱 浩
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
微型燃气轮机发电系统用超高速永磁同步电机的转速高达100 000r/min,转子结构设计和动力学分析成为电机设计的关键环节和技术难点[1].不平衡磁拉力直接影响超高速永磁同步电机转子的临界转速和动态响应,导致转子产生振动和噪声,严重情况下会造成转子扫膛而损毁电机.因此,不平衡磁拉力的研究对超高速永磁同步电机转子的优化设计以及微型燃气轮机发电系统的安全运行均具有非常重要的意义.
产生不平衡磁拉力的原因较多,主要是电机磁路不对称所致[2].现有文献大多关注于转子偏心导致的不平衡磁拉力.文献[3-5]分别采用非线性积分法、气隙磁密法、Fourier级数展开法等对转子偏心引起的电机不平衡磁拉力进行了研究.文献[6]研究了转子偏心导致的不平衡磁拉力对电机转子动态特性的影响.然而工程实践表明,由转子永磁体充磁角度偏差导致的不平衡磁拉力同样对高速电机的可靠工作有着很大的影响.但是,对于充磁角度偏差导致的电机不平衡磁拉力的研究却相对缺乏.
以箔片空气轴承支承的微燃机用超高速永磁同步电机作为研究对象,本文采用有限元方法对充磁角度偏差导致的不平衡磁拉力及其作用下的空气轴承-转子系统的动力学性能进行了研究.将转子磁芯剖为两个半圆,分别设定其充磁方向,用以模拟转子磁芯的充磁角度偏差.采用弹簧-阻尼单元来模拟箔片空气轴承的特性,获得了空气轴承-转子系统的固有频率以及充磁偏差导致的不平衡磁拉力作用下的转子振动特性,确定了永磁体充磁角度偏差的最大许用值,并通过试验验证了分析结果的正确性.
1 永磁体的充磁角度偏差
微型燃气轮机发电系统用超高速永磁同步电机的最高转速为96 000r/min,其结构如图1所示.电机槽极比为18∶2.转子磁芯由两段圆柱形钐钴永磁体粘接而成.高强度奥氏体不锈钢制成的磁芯护套与压气机和透平的转子直接相连,共同构成微燃机发电系统的转子部分.转子部分采用非机械接触式箔片空气轴承支承.图2所示分别为超高速永磁同步电机工程样机的定、转子以及转子磁芯.

图1 微燃机用超高速永磁同步电机结构
采用磁场分布测试仪对同批次不同转子样件表面磁场分布进行测量,测量结果如图3和表1所示.表1为图3中两个转子样件A和样件B表面磁场N极和S极的磁密最大值及其所处的位置.

图2 工程样机的定子、转子和磁芯

图3 转子样件表面磁场分布测量结果

表1 转子永磁体充磁角度偏差分析
由图3和表1可见,由于永磁体制造和充磁工艺的限制,磁芯普遍存在充磁角度偏差的问题,且表现出个体差异性,具体为:
1)沿圆周方向,N极和S极的磁密最大值基本一致,但是磁极位置有偏差,最多相差可达20°;
2)沿轴线方向,同一磁芯的两段永磁体磁极角度偏差不一致.
2 充磁导致的不平衡磁拉力
2.1 FEA模型
根据电机结构和材料参数,采用Ansoft Maxwell 2D建立了超高速永磁体同步电机的二维时步有限元模型,如图4所示.
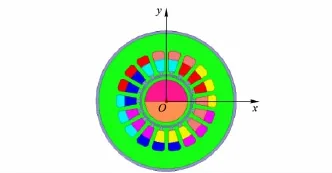
图4 超高速永磁同步电机的二维有限元分析模型
模型中的转子坐标系定义如图5a所示.静止坐标系xOy,旋转坐标系坐标系x′Oy′和x″Oy″的原点均位于转子圆心O上.O′为定子圆心,OO′表示转子偏心距离l.坐标系x′Oy′随着转子磁芯的旋转而旋转,其x′轴位于转子磁芯磁极的几何中性线上.坐标系x″Oy″随着转子偏心位置的改变而改变,其x″轴指向气隙最小的位置,与x轴的夹角表示偏心角,定义为φ.
为了模拟转子永磁体的充磁角度偏差,将转子磁芯剖为两个半圆,分别设定其充磁方向(如图5b所示),偏差角定义为α.

图5 坐标系和转子永磁体磁化方向定义
2.2 磁拉力计算
2.2.1 转子无偏心、磁芯充磁角度有偏差的情况
不考虑转子偏心,分别以充磁角度偏差角为0°,5°,10°,15°,20°的情况,分析转子磁芯充磁角度偏差导致的不平衡磁拉力.计算结果如图6所示.可见,由充磁角度偏差导致的电机不平衡磁拉力Fm的大小与充磁角度偏差角α基本上成正比例线性关系,力的方向始终指向-x′方向(如图5a所示).

图6 转子无偏心时充磁角度偏差导致的不平衡磁拉力
2.2.2 转子有偏心,且磁芯充磁角度有偏差的情况
假设转子磁芯充磁均匀,即磁芯充磁偏差角度为0°,得到的由转子偏心引起的不平衡磁拉力Fe与偏心距离l的关系,如图7所示.可见,Fe与l近似的成正比例关系,其方向是指向偏心距的方向.
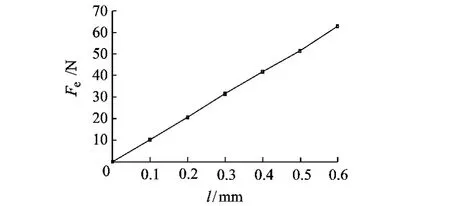
图7 充磁均匀时由转子偏心导致的不平衡磁拉力
考虑转子偏心时,超高速永磁同步电机的不平衡磁拉力由转子偏心和转子磁芯充磁角度偏差共同产生.如图8所示,当转子以转速ω旋转时,Fm的方向是随着转子一起旋转的,即与正x轴之间的夹角为ωt+π.而Fe的方向则总是指向气隙最小的方向,与x轴之间的夹角为φ.
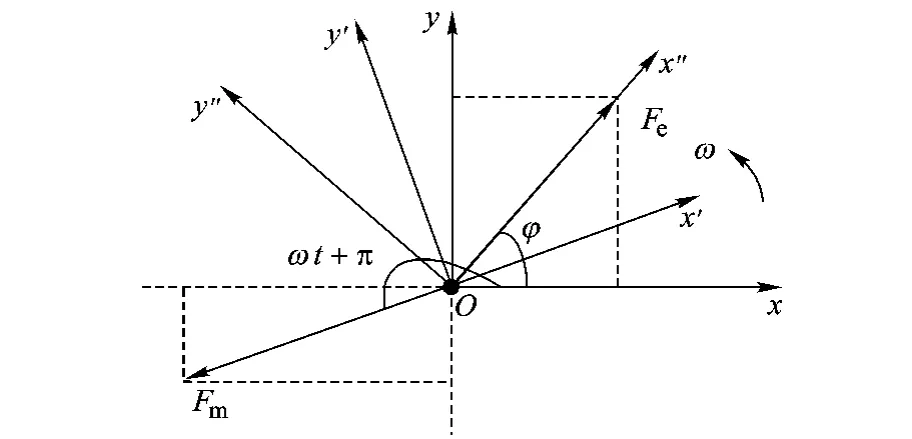
图8 不平衡磁拉力矢量图
将Fm和Fe分别投影到x轴和y轴,得到转子有偏心和充磁角度有偏差时的超高速永磁同步电机不平衡磁拉力F:

由式(1)可知,若保持α和l不变,当Fm和Fe同方向时,即满足φ-ωt=(2n-1)π时,电机的不平衡磁拉力幅值最大,为二者之和.图9给出了不同转子偏心距和不同充磁角度偏差时,电机不平衡磁拉力的最大幅值.可知,转子偏心距离和充磁角度偏差角的增大都会导致电机不平衡磁拉力的增大.由于箔片空气轴承气膜厚度的限制,转子偏心距离通常比较小.因此,充磁角度偏差对微燃机用超高速永磁同步电机的不平衡磁拉力的影响更大.

图9 充磁角度偏差和转子偏心导致的最大不平衡磁拉力
3 空气轴承-转子系统动力学分析
由于空气轴承结构和理论的复杂性,关于箔片空气轴承-转子系统的动力学分析的文章仍然很少[7].现有文献大都没有涉及不平衡磁拉力对高速电机空气轴承-转子系统的影响[8-10].
在Ansys Workbench环境下建立了微燃机用超高速永磁同步电机空气轴承-转子系统的动力学分析模型(见图10).采用8个弹簧-阻尼单元来模拟箔片空气轴承,空气轴承刚度值为2.7×106N/m.转子护套和永磁体的材料参数如表2所示.
图10 电机空气轴承-转子系统的动力学分析模型

表2 转子护套和永磁体磁芯的材料参数
对建立的模型进行模态分析,求得微燃机用高速永磁同步电机空气轴承-转子系统的固有频率如表3所示.

表3 空气轴承-转子系统的固有频率
图11给出了转子的前四阶模态振型.一阶模态的固有频率约等于零,其振型为轴向刚体平动,如图11a所示.二阶模态为自转和径向膨胀,是高速旋转系统的固有特性,如图11b所示.三阶和四阶模态的振型为平行于转子轴线的单边摆动,如图11c和图11d所示.五阶和六阶模态为锥形摆动,其固有频率已经超过了微燃机用超高速永磁同步电机的最高工作频率1 600Hz.

图11 电机空气轴承-转子系统的模态振型
利用模态分析结果,对不平衡磁拉力作用下的微燃机用超高速永磁同步电机空气轴承-转子系统进行谐响应分析.当不平衡磁拉力与重力方向一致时,转子所受合力最大,将此合力作为施加在转子上的载荷.系统阻尼系数设定为0.1N/(m·s-1).图12给出了不同转子磁芯充磁偏差角时转子振幅的频率响应曲线.

图12 不同充磁角度偏差角时的谐响应分析结果
可见,在不同α下,转子振幅最大值出现的频率点相同,均在740Hz附近.振幅最大值随着α的增大而增大.电机运行过程中,无论是否发生共振,如果转子振幅超过了空气轴承的气膜厚度,就会引起箔片空气轴承与转子接触而发生“抱轴”.因此,要想避免这一现象的发生,必须保证转子发生共振时的幅值不超过空气轴承的最小气膜厚度.本文中,箔片空气轴承的最小气膜厚度为10μm.由图12可知,只有将转子磁芯充磁角度偏差限制在5°以内,才可保证转子系统的安全运行.
在微型燃气轮机发电系统调试过程中,多次出现转子与空气轴承“抱轴”现象,发生故障时的转速为35 000r/min左右,相应的工作频率为583Hz.根据图3的测试结果,转子磁芯充磁角度偏差最大为20°,此时,转子在583Hz时的振幅已经超过了10μm,因而导致了故障的发生.采取措施对转子磁芯充磁进行严格控制,将充磁角度偏差角控制在5°以内,该现象不再发生,分析结果得到了验证.
4 结 论
不考虑转子偏心时,充磁角度偏差导致的电机不平衡磁拉力的大小与充磁角度偏差角近似成正比例,其方向是随着转子旋转的;考虑转子偏心时,通过矢量合成可以获得任意充磁偏差角度和偏心距离下的电机不平衡磁拉力.由于采用箔片空气轴承支承,充磁角度偏差对微燃机用超高速永磁同步电机的不平衡磁拉力的影响更大.不平衡磁拉力作用下的微燃机用超高速永磁同步电机空气轴承-转子系统在740Hz附近时会发生共振,其振幅随着充磁偏差角的增大而增大.当振幅超过箔片空气轴承的最小气膜厚度时,会导致空气轴承与转子接触而发生“抱轴”.因此,在转子设计过程中,减小不平衡磁拉力重点应从避免转子磁芯充磁角度偏差上采取措施,将充磁偏差角控制在5°以内,使系统处于稳定,小振幅的运动状态.
(References)
[1]Hong D K,Woo B C,Lee J Y,et al.Ultra high speed motor supported by air foil bearings for air blower cooling fuel cells[J].IEEE Transactions on Magnetics,2012,48(2):871-874
[2]白晖宇,荆建平,孟光.电机不平衡磁拉力研究现状与展望[J].噪声与振动控制,2009(6):5-7
Bai Huiyu,Jing Jianping,Meng Guang.Survey and outlook on the research of the unbalanced magnetic pull in the motors[J].Noise and Vibration Control,2009(6):5-7 (in Chinese)
[3]Li Weili,Tang Li,Zhang Xiaocheng,et al.Calculation and analysis of high-speed permanent magnetic generator unilateral magnetic force[C]//International Conference on Electrical Machines and Systems.Wuhan,China:IEEE,2008:3284-3288
[4]Stol R L.Simple computational model for calculating the unbalanced magnetic pull on a two-pole turbogenerator rotor due to eccentricity[J].IEE Proceedings-Electric Power Applications,1997,144(4):263-270
[5]郭丹,何永勇,褚福磊.不平衡磁拉力及对偏心转子系统振动的影响[J].工程力学,2003,20(2):116-121
Guo Dan,He Yongyong,Chu Fulei.The calculation of unbalanced magnetic pull and its effect on vibration of an eccentric rotor[J].Engineering Mechanics,2003,20(2):116-121(in Chinese)
[6]Pennacchi P,Frosini L.Dynamical behaviour of a three-phase generator due to unbalanced magnetic pull[J].IEE Proceedings on Electric Power Applications,2005,1524(6):1389-1400
[7]Czolczynski K.Rotordynamics of gas-lubricated journal bearing systems[M].New York:Springer,2011:1-3,50-60
[8]张广辉,刘占生.径向气体轴承-柔性转子耦合系统动力学研究[J].航空动力学报,2010,25(6):1417-1426
Zhang Guanghui,Liu Zhansheng.Dynamic study of journal gas bearings-flexible rotor coupling system [J].Journal of Aerospace Power,2010,25(6):1417-1426(in Chinese)
[9]Lee Y B,Park D J,Kim C H,et al.Rotordynamic characteristics of a micro turbo generator supported by air foil bearings[J].Journal of Micromechanics and Microengineering,2007(17):297-303
[10]Lee Y B,Kim T H,Kim C H.Unbalance response of a super-critical rotor supported by foil bearings—comparison with test results[J].Tribology Transactions,2004,47:54-60
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
清远职业技术学院学报(2022年1期)2022-01-24
舰船电子工程(2021年12期)2022-01-06
家庭影院技术(2021年6期)2021-07-28
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
中国农村水利水电(2019年1期)2019-01-21
金桥(2018年1期)2018-09-28