
基于NVIDIA GPU的机载SAR实时成像处理算法CUDA设计与实现
2013-10-03 12:25孟大地胡玉新石涛孙蕊李晓波
雷达学报 2013年4期
孟大地 胡玉新 石涛 孙蕊 李晓波
(中国科学院电子学研究所 北京 100190)
(中国科学院空间信息处理与应用系统技术重点实验室 北京 100190)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种具有全天时、全天候、获取微波散射信息丰富等特点的重要的遥感技术手段,在军事、农业、林业、海洋等领域均具有巨大的应用潜力[1]。但由于高分辨率SAR系统接收的原始数据量大,并且需要经过复杂的2维匹配滤波处理才能获得SAR图像,甚至有些应用领域对 SAR图像获取具有较高的实时性要求,从而使得高速的成像处理技术成为SAR领域的一项关键技术。目前一般利用基于中央处理器(Central Processing Unit,CPU)的个人计算机、工作站以及大型计算服务器进行后期的 SAR成像处理,这时需要投入大量资金购置多台具有足够处理能力的计算设备,并利用 OpenMP[2]或 MPI[3]等并行编程技术进行软件实现。而SAR实时成像处理器一般用FPGA或DSP实现,这时均需要较为复杂的编程手段以及采购昂贵的硬件设备。
由于图形处理市场的拉动作用,图形处理器(Graphic Processing Unit,GPU)已经发展成为具有高度并行、多线程、多核心、超大带宽、具有数百个计算单元的高性能处理平台。与通用的 CPU相比,由于GPU产品不具有CPU产品中的流程控制、缓存等功能部件而专注于进行数据运算,因此GPU产品更适用于作为以浮点运算为主、适于并行化的计算任务的运行平台[4]。近年英伟达(NVIDIA)公司GPU产品与英特尔(Intel)公司CPU产品的计算性能对比如图1所示[4],可见各时期GPU产品的运算速度以及传输带宽远高于同时代的 CPU产品。NVIDIA于2006年11月推出了一种将GPU用于进行高性能计算的通用并行计算架构(Compute Unified Device Architecture,CUDA)以及相关的并行编程模型和函数库。该技术的出现大大推动了GPU在高性能计算领域的广泛应用[4]。借助于CUDA技术,在传统CPU上运行的需要大量浮点运算的代码可以方便地移植到 GPU上,而代码的条件判断等逻辑控制部分仍然在CPU平台上运行[4]。
机载 SAR成像处理过程一般由向量相乘、转置、快速傅里叶变换(FFT)以及插值等运算模块组成[1],各运算模块都能以较高的效率进行并行化处理,因此有望利用CUDA技术在GPU上实现成像处理算法,并取得与CPU上的成像处理算法相比较大幅度的速度提升。本文拟利用CUDA技术将传统的机载SAR成像处理算法部署于NVIDIA的GPU产品上,并用于进行SAR实时成像处理。
当前支持CUDA技术的主流GPU产品的显存较小,一般不超过6 GB,不足以容纳一景SAR数据量,且具有较大显存的高端产品价格较为昂贵。由于成像处理过程中需要多次进行转置操作,因此需要在主机内存中开辟足够空间用于存储全部处理数据,并在成像处理的各个阶段将数据进行分块,各块依次传入 GPU设备显存,处理完成之后将处理结果传入主机内存。设备显存与主机内存通过PCI-e接口进行数据交互,该接口的单向传输速度约为 6 GB/s(2代 PCI-e×16,CUDA SDK 提供bandwidthtest软件测试结果),因此数据在主机内存与GPU显存之间的多次交互导致GPU的处理性能不能得到充分发挥,处理效率大大降低。
本文利用 CUDA编程接口中的异步执行(asynchronous concurrent execution)[4],流(stream)等技术[4],以及对SAR数据的分块处理策略,提出了一种运行于NVIDIA GPU产品上的成像处理算法的设计方案。该方案在不降低算法处理精度的基础上,掩盖了数据在主机内存与设备显存之间的交互传输,从而能够充分利用GPU设备的计算资源;当主机上配置多个 GPU设备时,该方案还支持多GPU设备的同时执行,提高了方案的硬件配置灵活性;该方案中的所有大规模计算任务都由 GPU完成,CPU只进行足以忽略不计的简单计算、参数读取以及逻辑判断,因此主机只需配置足够的内存,而无须配置昂贵的高性能CPU,甚至单核CPU产品也足以胜任,降低了设备预算及设备功耗;该方案突破了GPU显存容量对SAR成像处理数据大小的限制,只需足够的主机内存,而不要求单个设备具有大容量显存,甚至不足1 G的显存容量也能满足处理需求,从而提高了实时成像处理算法对大数据量SAR数据的处理能力,拓宽了购置GPU设备时的选择范围,大大降低了对 GPU设备内存容量的要求,从而降低了设备购置的资金预算;另外,该方案不但能用于SAR实时成像处理,也能用于事后SAR数据处理,这时甚至可以将该方案部署在笔记本电脑上,大大增加了成像处理设备的便携性。

将机载ωκ成像处理算法在一部 NVIDIA K20C(计算能力 3.5,2496个 CUDA计算核心(core),功耗225 W,市场价格约为25000元人民币,用CUDA 5.0编译)[5]以及一颗INTEL Xeon E5645(Westmere系列,主频2.4 GHz,6核心,功耗80 W,市场价格约为2900元人民币,用INTEL编译器编译,调用INTEL MKL数学运算库)[6]上的对比测试表明,该方案可以达到约每秒处理36 M个原始数据采样点的处理速度。与基于 CPU的处理算法相比,该方案可以达到约15倍的加速比,基本与图1的性能对比相符。对方位/距离向各为32768的SAR数据,一部K20C处理所需时间约为7 s(不包括原始数据读取、数据写入、内存/显存的分配和释放),足以保证成像处理的实时率。
本文第2节根据CUDA并行化特点对SAR成像处理算法的结构特征进行分析;第3节简要介绍了SAR实时成像处理算法实现所需CUDA编程技巧;基于以上两节的讨论,第4节详细讨论了基于CUDA的 SAR实时成像处理算法设计思路以及最终实现方案;第5节利用仿真SAR数据验证了算法的处理速度,并与基于CPU的处理结果进行对比;第6节对本文内容进行了总结。
2 SAR成像处理算法结构分析
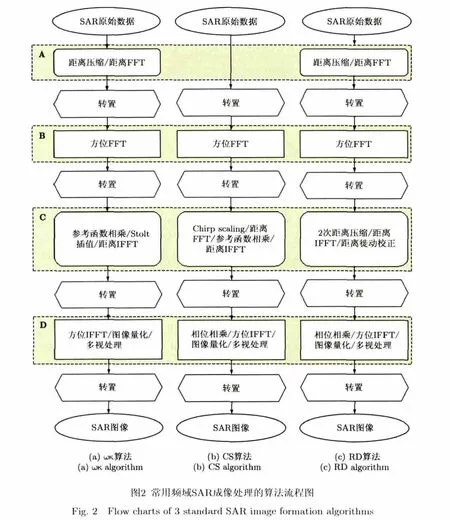
目前一般采用频域2维匹配滤波的成像处理算法[1]进行SAR成像处理,而不采用运算量多出数百倍甚至千倍的时域后向反投影算法[7],对于实时成像处理算法更是如此。频域匹配滤波算法主要包括距离多普勒(RD)算法、Chirp Scaling(CS)算法以及ωκ算法。3种算法的详细介绍及优缺点对比参见文献[1]。3种算法的处理步骤见图2所示流程图[1]。图2中圆角矩形表示距离向处理,所处理数据按先排距离向存储;直角矩形表示方位向处理,所处理数据按先排方位向存储。
由图2可见,3种频域机载SAR成像处理算法具有大致相同的算法结构,在研究其在 GPU上的部署时,可以统一进行分析与设计。因此下文内容适用于3种算法中的任何一种。
机载SAR在实际数据获取过程中,载机受气流影响会偏离理想水平匀速直线运动状态,导致原始回波数据与成像处理算法失配,因此在对实际机载SAR 数据进行处理时,还需进行运动补偿[8]。本文中采用文献[9]中介绍的具有更高精度的运动补偿算法(考虑了距离空变的距离走动补偿),在图 2中的步骤A距离压缩之后进行运动补偿处理即可。
在图2中,由于SAR原始数据以及处理中间结果数据在计算机内存中的线性存储特点,3种算法都需要在处理过程中进行3次转置操作(改变2维数据的优先存储方向,以利于处理器对内存中数据的读取/写入效率)。SAR原始数据最初是处于先排距离向的存储状态。3种算法在不同的数据存储方式下(先排距离向或先排方位向)对数据执行所需操作(图2中表示为A,B,C,D 4个运算模块),最终获得先排距离向的SAR图像。
由于上述3种算法在执行过程中都需要进行多次转置,要将其利用CUDA技术在GPU上部署,首选方案是将所有数据一次性读入 GPU显存,并在 GPU上用 kernel(GPU处理任务的调度单元[4])的方式实现算法的所有运算模块。目前已有基于CUDA技术的SAR成像处理算法均采用了这种方法[10-13],因此可处理一景数据所包含脉冲数受到GPU显存容量的限制。而当GPU显存容量(不超过6 GB,未来预计会有更高显存容量的GPU产品问世,但价格总是与内存容量成正比)不能容纳一景SAR数据时,这时只能先将所有数据存入主机内存,在主机端利用CPU完成4次转置操作。在不同的数据存储方式下,每个运算模块由以下方式实现:根据显存容量对所需处理数据进行分块(每个分块的数据连续存储,并确保GPU显存能容纳每块数据,分块处理并不影响算法的处理精度);对于每个数据块,先将其拷贝至GPU显存,在GPU中用kernel的方式实现模块相关处理步骤,再将结果写入主机内存的原位置;最后从主机内存中将处理结果SAR图像存盘。
在上述实现方式中,GPU需要等待主机端的转置操作完成才能执行之后的运算模块,由此带来两点不便:CPU转置操作与GPU运算不能同时执行,降低了算法的整体处理效率;为了提高转置效率,需要配置运算速度较快的CPU,增加设备预算及设备功耗。
由此可见,为了充分利用 GPU设备的运算性能,降低对CPU的性能要求,在将数据存储于主机内存(始终以先排距离向的存储方式)以及采用分块处理策略的前提下,需要将转置操作以及A,B,C,D 4个运算模块在GPU上执行,而CPU只承担流程控制、数据读取/写入以及少量简单运算。另外,还需要利用CUDA编程接口中的异步并行技术,使得主机内存与GPU显存之间的数据交互与kernel并行执行,从而减少甚至消除kernel执行对数据交互的等待时间。
3 相关CUDA编程技巧
CUDA编程技术的基本任务划分原则是:由主机负责算法的整体架构,而将算法中的大运算量模块交由 GPU处理。这些大运算量模块一般由连续执行的若干步骤组成,其中某些步骤可直接调用现有的CUDA函数库(如FFT可由CUFFT中的库函数实现),其余无库函数可供调用的步骤需编写对应的kernel。
根据上节对 SAR成像处理算法的结构特征分析,对于图2中A,B,C,D 4个运算模块,均需要执行CPU→GPU数据复制、数据处理、GPU→CPU数据复制3个步骤;对于模块B与模块D,还需要在数据处理之前进行先排距离向到先排方位向的转置操作,以及在数据处理之后进行先排方位向到先排距离向的转置操作。两次转置操作均由 GPU完成。要利用CUDA技术将这种实现方案在GPU上部署,并充分利用 GPU设备的运算资源以及传输带宽,需要利用CUDA编程技术所提供的各种接口解决以下几点技术难题。
3.1 内存分段拷贝与转置处理
根据第2节对SAR成像处理算法的结构分析,需要对主机内存中的 SAR数据分块,对每块执行“读入 GPU显存→数据处理→写入主机内存”3步操作。由于数据始终以先排距离向的方式存储于主机内存,因此在进行距离向操作(图 2中以圆角表示的模块,模块A,C)时,所需处理的数据块连续存储于主机内存的一段空间(如图3(a)所示),这时可直接利用 CUDA 库函数 cudaMemcpy[4]或cudaMemcpyAsync[4]将其由主机内存复制到 GPU显存,处理结束后再由该函数将处理结果从 GPU显存复制到主机内存的原位置。
而在进行方位向操作(图 2中以直角表示的模块,模块 B,D)时,所需处理的一块数据在主机内存中分散于 Na个连续存储数据段(如图 3(b)所示,其中 Nr为距离向采样点数,Na为脉冲个数),这时就需要调用 CUDA编程接口所提供的支持分段复制的内存复制函数 cudaMemcpy2D[4]或cudaMemcpy2DAsync[4]进行模块前后的两次数据块复制。在将数据由主机内存传入 GPU显存后,数据按照先排距离向方式存储于 GPU显存上一块连续的存储空间,这时还需要将该数据做转置处理(数据将按先排方位向方式存储),才能进行后续的数据处理操作。在数据处理完成之后,还需再进行一次转置处理(数据将按先排距离向存储),才能再次调用cudaMemcpy2D或cudaMemcpy2DAsync将处理结果写入主机内存原位置。
CUDA Samples中提供了利用共享内存技术在GPU 上实现转置操作的示例[14],本文转置 kernel的设计直接采用了该方法。另外,为了让转置执行与内存显存之间的数据复制实现下节所述的异步并行化,在实现转置kernel时,借助于cudaMemcpy2D或 cudaMemcpy2DAsync,转置前后数据均位于GPU显存上,而未采用内存映射(mapped memory)技术[4]或统一虚拟地址空间(unified virtual address space)技术[4]所实现的从主机内存读取数据直接进行转置。
3.2 并行处理相关技术
3.2.1 异步并行技术 在计算能力不低于1.1的部分GPU设备上,CUDA编程架构提供了主机内存与GPU显存之间数据传输与kernel执行的并行机制,称为异步并行技术。合理地利用该技术,使得数据复制与kernel执行同步进行,可以尽可能地保证GPU设备的运算核心处于忙碌状态,减少甚至消除第 2节所述kernel对所需数据的等待时间。在计算能力不低于2.0的部分GPU设备上,CUDA编程架构甚至支持“主机内存→GPU显存数据传输、kernel执行、GPU显存→主机内存数据传输”3者的并行机制[4]。
但是,这种并行机制也受到所复制数据与kernel执行所需数据的依赖性的限制,即在 kernel执行所需数据复制到显存完成之前kernel一直处于等待状态,在kernel执行完成之前无法将执行结果复制到主机内存,因此该技术不能直接应用于SAR成像处理算法。
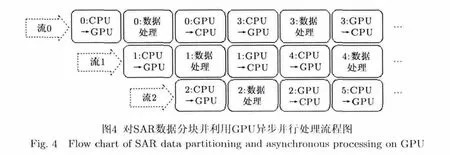
3.2.2 流技术 异步并行技术的实施需要借助于流(stream)技术。创建若干个流,将所需处理任务分配到各个流上。在各流的当前任务满足上节所述的并行执行条件时,由于流的可并行执行特性[4],从而实现了当前各任务的并行执行。图4示意了这种异步并行方案的实现方式。其中 CPU代表主机内存,GPU代表 GPU显存,各圆角矩形中的数字代表分块序号。将图2中的每个运算模块部署在GPU上时,可按照如图4所示策略进行任务调度(对于运算模块B,D,在数据处理前后还包含两次转置操作)。
如图4所示,创建3个流,先将前3个SAR数据块分别交由流0,流1,流2处理,每块数据的处理都包括“CPU→GPU数据传输、数据处理、GPU→CPU数据传输”3项任务(该示例中假设各处理模块的执行时间相等)。由于3个流的同类处理任务不能并行执行,因此相邻流之间有一个任务执行时间的延时,而3个流的不同类处理任务可以并行执行。再继续将后续待处理数据块依次发射(issue)在 3个流上,即可保证所有时刻3个流中的处理步骤都处于并行执行状态。这时除了整个任务的首尾少量时间3个流未完全并行外,处理过程中绝大部分处理时间3个流都处于并行执行状态,从而保证了GPU运算核心(core)绝大部分时间处于忙碌状态,有效掩盖了数据在主机内存与GPU显存中的传输时间。

为了降低3个流首尾未并行任务块占总任务的比例,需要保证SAR数据的分块数不能太少,而各分块尺寸太小时不能充分利用所有 CUDA运算核心。实际中可通过多次试验选取效率较高的分块大小和分块总数组合。
3.2.3 事件同步技术 如前所述,图4中的数据处理环节由若干个kernel组成,而且kernel执行时间与单向数据传输时间一般情况下不完全相同,根据GPU对各流所发射kernel的调度机制,在运行过程中各流的 kernel可能会交替执行[4],从而导致图 4中的某些数据处理环节(由多个 kernel组成)开始到结束所需时间增加。为了避免此现象,确保每个数据处理环节中的所有kernel集中连续执行,可以利用CUDA中的事件(event)技术[4]。在每个数据处理环节的末尾(GPU→CPU 数据传输环节开始前)利用cudaEventRecord函数标记事件同步节点,并在下一个数据处理环节的起始(CPU→GPU数据传输环节结束后)时利用 cudaEventSynchronize函数对该事件标记进行同步。根据事件的同步特点,在cudaEventRecord函数调用之前的所有CUDA操作完成之前,cudaEventSynchronize之后的CUDA操作不能进行,从而确保了每个数据处理环节中各kernel的集中连续执行。详见下述实验结果。
3.2.4 多GPU并行处理技术 当一台主机内有多部GPU设备时,利用流技术还可以实现所有设备之间的并行处理。在每个GPU设备上各部署3个流,并将所有SAR数据处理任务依次发射到各个流上,从而在每个 GPU设备内部异步并行的同时,也实现了多GPU设备的并行处理。
对于第i个数据块,所对应的GPU设备号iGPU以及流号istream的计算方法分别为(三者均以0为起始编号):

其中NGPU为GPU设备个数,%表示求余操作。
3.3 显存分配策略
由上节可知,为了充分利用 GPU设备的异步并行技术掩盖数据传输时间,在每个 GPU设备中需各分配3个流。由于各流之间除并行关系外相互独立运行,因此需要为每个流分配一个独立的存储空间用于存储从主机内存加载的数据块。另外,各个运算模块中的某些运算步骤需要用另外一块同样大小的存储空间存储运算处理结果,这些运算步骤包括转置处理,ω κ算法中的 stolt插值处理[1],运动补偿处理[4]等。因此,需要对每个流分配两个同样大小的存储空间。实践表明,对于机载SAR实时处理算法来说,两块存储空间已能够满足算法的运算需要。
由此可见,每个GPU设备上共需分配6块同样大小的存储空间。另外利用CUFFT库函数进行FFT运算时,需要为每个流根据数据尺寸调用cufftPlan1d()创建一个plan配置数据。以上9项存储空间之和不能超过一个GPU设备的显存总容量。
4 设计与实现
4.1 存储空间分配与FFT plan
在成像处理开始之前,需要先进行内存及显存分配,在所有步骤执行完毕之后,再将所分配内存及显存释放。
首先在主机内存中分配两段存储空间H0与H1,H0用于存储读入的原始数据以及处理结果 SAR图像(一般1个采样点占用1个或2个字节),H1用于存储算法各阶段的中间处理结果(一般按单精度浮点存储,1个采样点占用8个字节)。假设所需处理的一景 SAR数据每个回波脉冲采样点数为 Nr,共Na个脉冲,则H0与H1占用字节数分别为:

为了提高主机内存与 GPU显存之间的数据传输速度,H0与H1按照页锁定(page-locked)的方式进行空间分配[4]。
根据第3节所述,在每部GPU设备上各分配3个流Sij(其中i,j分别表示以0为起始的GPU编号以及流编号),并为每个流在所在GPU设备显存上分配两块字节数分别为Md(按照上节所述进行设置)的存储空间DA,ij与DB,ij,用于完成图2中每个模块的各个计算步骤。根据显存块大小Md,可以得到用于每个运算模块的数据分块大小。对于先排距离向的运算模块A,C,每个数据块的方位脉冲数为:


为了方便起见,如有必要,Ba与Br可在以上计算结果基础上适当减小,使其分别能整除Na与Nr。对于运算模块A,C,处理数据的分块数为Ca=Na/Ba;对于运算模块 B,D,处理数据的分块数为Cr=Nr/Br。
另外,由于各运算模块的执行步骤中都需要用到FFT操作,对于每个运算模块,还需要为每个流Sij根据数据块2维尺寸利用CUDA函数cufftPlan1d建立 FFT执行所需 plan,并将所创建 plan用cufftSetStream 函数与所属流关联[4]。由于 plan的创建及销毁占用时间非常小,对于每个运算模块,可以在模块执行前建立并关联所需plan,模块执行完毕后立即调用 cufftDestroy函数销毁,或者在算法开始运行时创建所需plan,算法结束时销毁所需plan。
4.2 算法设计
根据以上对CUDA编程技术以及SAR成像处理算法特点的分析,在上述存储空间分配方案基础上,可按照以下方案进行机载SAR实时成像处理算法设计:
(1) 将所需处理SAR原始数据由文件读入主机内存H0。
(2) 将 H0中的 SAR原始数据沿方位向均分为Ca块,各块字节数均为2NrBa。各块按照图4所示方案依次分配给各个流 Sij,各个流 Sij调用cudaMemcpyAsync函数将所分配数据块读入显存空间DA,ij,再进行运算模块A的各处理步骤,最后将结果由cudaMemcpyAsync函数写回主机内存H1的对应位置,每块写回数据字节数为 8NrBa。此时数据在H1中按照先排距离向的方式存储。
(3) 将H1中的数据沿距离向均分为Cr块,各块按照图4所示方案依次分配给各个流Sij,每个流将所分配数据块(非连续存储,如图 3(b)所示)先由cudaMemcpy2DAsync函数读入显存空间 DB,ij,再由转置kernel将DB,ij中的数据转为先排方位向方式存储于DA,ij,然后进行运算模块B的各处理步骤;处理完成之后再次调用转置 kernel将处理结果(可能在 DA,ij或 DB,ij中,视具体实现方式而定)转为先排距离向方式存储于该流的另一块显存空间,将结果由cudaMemcpyAsync函数写回主机内存H1的原位置。此时数据在H1中仍然按照先排距离向的方式存储。
(4) 按照与步骤(2)类似的方式执行运算模块C,但不是从H0中读取数据,而是从H1中读取数据。
(5) 按照与步骤(3)类似的方式执行运算模块D,但有以下几点区别:(a) 在对处理结果进行转置时,由于多视后每个图像的像素点按照1个字节或2个字节无符号存储,因此需要实现一个新的转置kernel,但也可将转置 kernel利用 C++的模板(template)技术实现,从而对中间结果的转置处理以及对多视结果的转置处理可复用一个函数代码;(b)由于每块数据处理前后数据量变化,而且数据在主机内存中非连续存储,因此不能再将处理结果写回H1的原位置,但可以将处理结果写入H0。各块图像数据在 H0中的组织及写回方式与 3.1节所述及图3(b)所示方式相同。
(6) 将H0中的处理结果图像写入图像文件。
在以上各步骤中,除了第(1)步数据读取以及第(6)步数据落盘(这两步受磁盘条件限制无法通过并行手段提高执行速度)以外,在步骤(2)-步骤(5)中,每步对所有数据块的处理都按照 3.2节所述方式实现了并行执行,从而充分利用了 GPU设备的传输带宽以及计算资源,保证在最短时间内完成所有的处理步骤。
4.3 批量任务处理策略
将上述方案用于实时成像处理时,需要对各景SAR数据依次进行处理。为满足实时性要求,对各景的处理之间不能有长时间等待。在上述方案中,当一景数据量较大时,对H0,H1,DA,ij以及DB,ij的分配及释放都需要占用较多的时间,若对每景数据都进行一次存储空间的分配及释放,将大大降低处理的实时性。
为了避免存储空间的分配和释放对处理实时性的影响,在各景数据2维尺寸不变的情况下(一般至少在一个条带内能够保证各景的数据 2维尺寸不变),可以通过图5所示的策略避免主机内存/GPU显存的重复分配与释放。对于单景数据距离/方位点数未发生变化的一组处理任务,在主机内存/GPU显存分配后对所有任务进行连续处理,处理结束后再将主机内存/GPU显存释放。
5 实验结果

图5 批量任务处理策略图Fig.5 Processing strategy of a batch of tasks
由上述设计思路可知,本文提出的基于GPU的实验结果如图6所示,其中蓝色表示CPU单线程处理,绿色表示CPU全速(6线程)处理,深红色表示 GPU处理。由于从磁盘读取原始数据和将结果图像写入磁盘两个环节对各种处理手段来说耗费时间相同,因此图6的时间测量结果中未计入这两个环节所花时间。的机载 SAR实时成像处理算法并未对成像处理算法本身做任何更改,也未用单精度代替双精度进行浮点运算,因此所需运算量与基于CPU的实现方式相同,而且能够完全达到算法本身应有的处理精度。本文将测试同样处理算法用本文所提出方案在GPU上实现时相对于常规在CPU上实现时处理速度的提升比例,而未针对分辨率等成像处理指标进行测试。本节测试在HP Z600立式工作站上进行,实验所用GPU选用NVIDIA K20C,CPU选用工作站自带INTEL E5645 @2.4 GHz。根据GPU处理速度提升比例的测试结果,还对价格、功耗、并行度、实时性等方面进行了分析。
5.1 加速比测试
对于某种成像处理算法,对一块机载SAR数据的处理时间仅取决于距离及方位向的采样点数,而与载频波段及分辨率无关。因此本节选用ωκ成像处理算法,利用一段X波段机载SAR仿真数据分别用本文方案和常规基于CPU的处理算法进行处理,并对处理所需时间进行对比及讨论。本节分别针对距离/方位采样点数均为16384与32768两种情况进行了仿真实验。由于实际机载SAR数据处理中都需要进行运动补偿处理,因此按照第2节所述在图 2的运算模块A中加入了运动补偿的处理环节。其它相关运行参数如表1所示,各种处理手段消耗时间

?
由于显存中的分块大小为256 MB(占用显存共计 1.5 GB),对于距离/方位点数为 16384的 SAR数据(中间结果数据量为2 GB),对所有数据的分块数目为8;对于距离/方位点数为32768的SAR数据(中间结果数据量为8 GB),分块数为32。
由图6可见,对于距离/方位点数为16384的SAR数据,与单线程及6线程CPU处理相比,GPU处理的加速比分别约为71与14;对于距离/方位点数为32768的SAR数据,加速比分别约为80与16。通过NVIDIA提供的并行处理可视化分析工具-Visual profiler[15]观察两者各运算模块的运行情况可知,两种情况下各流的处理及数据传输速度基本相同,但由于数据分块数较大时各运算模块首尾未并行部分占模块所有运行时间比例较大,因此距离/方位点数为32768时的加速比较大。
从价格的角度考虑,K20C目前市场价格约为E5645的将近10倍,可见与E5645相比K20C具有约1.5倍的价格优势。从功耗的角度考虑,本文方案中CPU无需承担任何大型运算任务,因此无需耗资配置高性能CPU,但须配置具有高速总线以及高速PCI-E插槽的主板。从功耗的角度考虑,K20C在处理时功耗约为140 W[5],而E5645的标称功耗为80 W,可见K20C具有约8倍的功耗优势。从便携性的角度考虑,由于需要约15颗E5645才能达到一部K20C的处理能力,而一块主板上的CPU插槽有限(目前市场上主流主板支持CPU个数一般不超过4个),因此至少需要配置4台主机。可见,选用GPU作为处理设备使得 SAR数据处理设备的便携性大大提高。

5.2 并行度分析
利用Visual Profiler对本文方案的并行度进行分析,观察数据在主机内存与GPU显存间的传输与GPU运算的并行程度,距离/方位点数为16384时的处理过程在Visual Profiler中如图7所示,其中黄色模块表示CPU/GPU间数据传输,其它颜色模块表示各种数据处理kernel。由图7可见,对于图2中的运算模块A,B,C,kernel的运行几乎没有任何中断,即由于数据传输与kernel执行的并行化,各数据块的kernel开始执行之前,所需数据都已就绪(各流的首尾数据块除外)。对于运算模块D,由于数据传入GPU时间大于数据传入 GPU的拷贝过程以及kernel执行所需时间,因此前者的执行几乎没有任何中断,而后两者在前者的执行过程中已并行完成,省去了前者的等待时间(各流的首尾数据块除外)。另外,由于各流的首尾数据块未完全并行,各运算模块总体执行时间与 kernel实际执行时间(或数据单向传输时间,取大者)相比有略微增加。

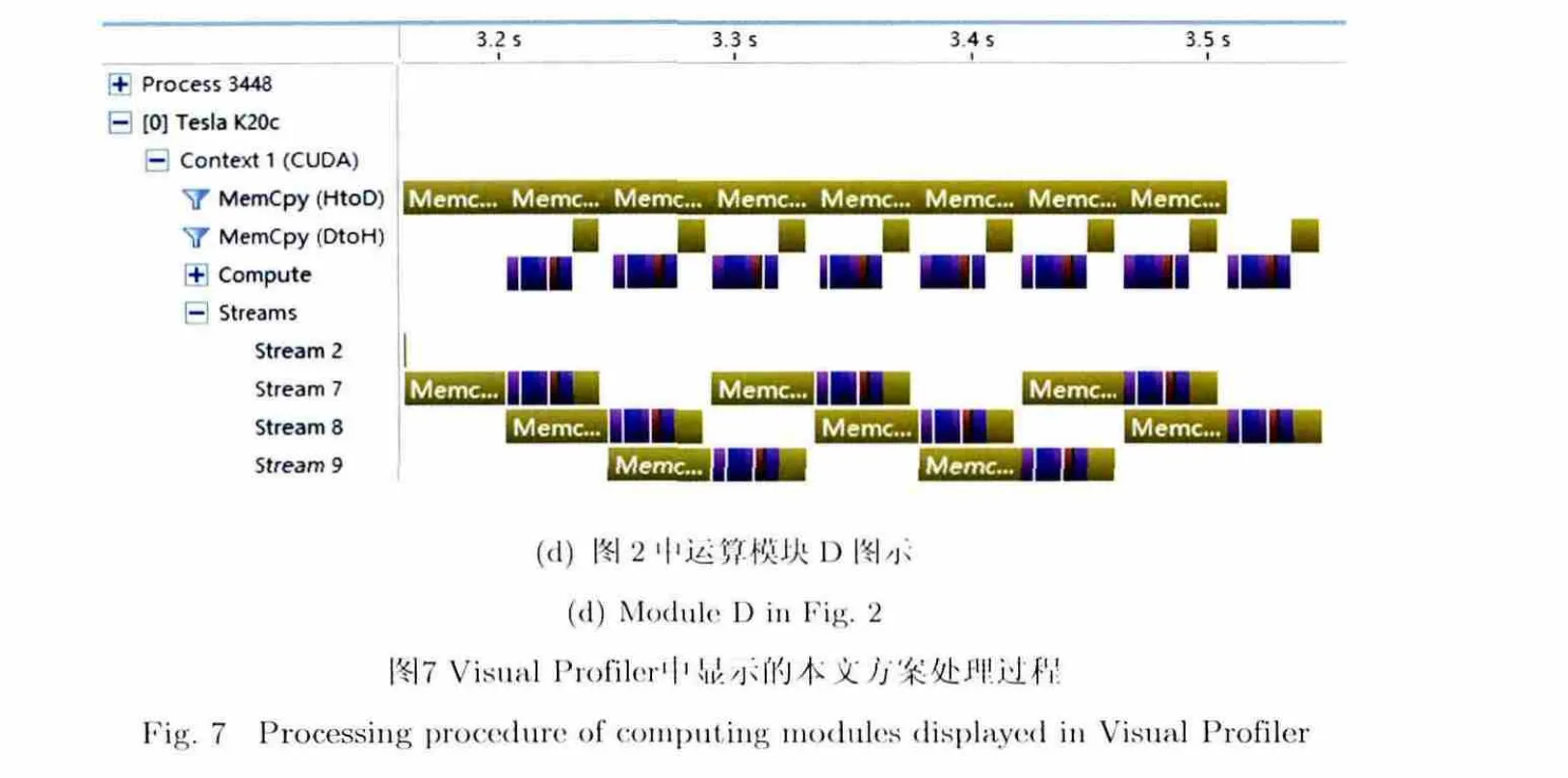
另外,如3.2.3节所述,由于采用了事件同步机制,各数据分块的所有kernel都实现了连续集中执行,各数据分块的所有kernel完全实现了顺序执行,从而避免了各GPU→CPU数据传输环节延缓执行。
但由于事件同步机制的影响,从第2个数据分块开始,每次cudaEventSynchronize调用都需要等待上一数据分块的cudaEventSynchronize调用成功返回,即每个数据块的数据处理任务及其之后发射的任务都需要在上一数据块的数据处理完成之后开始执行(launch)[4],因此导致了运算模块A,B,C从第3个数据分块开始每次的CPU→GPU数据传输环节的执行略有延迟。而运算模块D的kernel执行时间小于 CPU→GPU数据传输时间,因此未出现此现象。
5.3 实时性分析
机载SAR成像处理算法能否满足实时性要求,取决于处理速度是否大于数据采集速度。假设距离采样点数为Nr,每秒采集脉冲数为Prf,则数据采集速度为NrPrf。可见处理算法的实时性与处理速度、距离采样点数以及每秒采集脉冲数有关,而与SAR系统波段、天线尺寸、载机速度等因素无关。基于此,本节的分析无需设计距离采样点数与每秒采集脉冲数之外的其它无关因素。
在不考虑每景 SAR数据处理的不完全孔径截取的情况下,由图6可见,一部K20C对机载SAR数据的处理速度约为每秒处理36 M个原始数据采样点。对于距离采样点数为64k的SAR系统,则每秒处理数据量约为576个脉冲,因此一部K20C可以满足脉冲采样点数64k、脉冲重复频率(PRF)不超过576的机载SAR系统的2维全分辨率实时处理速度需求。
由于机载 SAR方位向分辨率为载机速度与多普勒带宽之比(与系统波段无关),假设载机速度为v,则一部K20C能够达到实时处理速度的机载SAR系统方位向分辨率约为:

在此基础上,还可以通过增加 GPU设备个数(目前 1部服务器或工作站主板最多可支持 4部GPU设备)扩充设备的处理能力,以达到增加距离采样点数以及提高方位向分辨率等要求。
6 结论
本文对机载SAR成像处理算法在CUDA架构下的高效实现方法进行了深入研究,首先对常用机载 SAR频域成像处理算法的结构特征以及 CUDA架构下的实现思路进行了详细分析,并对算法的CUDA实现所需解决的若干技术问题及其解决方法进行了详细论述。基于以上研究工作,提出并详细阐述了一种基于CUDA架构的机载SAR实时成像处理算法实现方案。该方案针对成像处理算法的结构特征以及CUDA架构的并行化特点,通过对显存/内存分配策略以及数据传输/kernel执行并行化的巧妙设计,借助于CUDA编程体系所提供的数据处理及传输接口,实现了处理算法在 NVIDIA GPU设备上的高效部署。该方案实现了绝大部分的数据传输环节与 kernel执行的并行进行,大大减少了kernel执行的数据等待时间。在NVIDIA迄今最新的通用计算高性能产品K20C上实验结果表明,借助于本文方案,与传统基于CPU的成像处理算法相比,基于K20C的机载SAR成像处理算法具有低廉的价格、极低的功耗以及高度的便携性,只需一台配备一部或多部K20C的主机即可具有相当于数十台普通主机的处理能力。
[1]Cumming I G and Wong F H.Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M].Norwood: Artech House,2002.
[2]OpenMP Architecture Review Board.OpenMP application program interface[OL].http://www.openmp.org/mp-documents/spec30.pdf,May 2008.
[3]Snir M,Otto S,Lederman S H,et al..MPI: The Complete Reference[M].US: The MIT Press,1996.
[4]NVIDIA.CUDA Cprogramming guide[OL].http://docs.nvidia.com/cuda/pdf/CUDA_C_Programming_Guide.pdf,July 2013.
[5]NVIDIA.Tesla k20 GPU active accelerator: board specification [OL].http://www.nvidia.cn/content/PDF/kepler/tesla-k20-active-bd-06499-001-v03.pdf,May 2013.
[6]Intel.Intel Xeon Processor E5645 [OL].http://ark.intel.com/zh-cn/products/48768.2010.
[7]Yegulalp A F.Fast backprojection algorithm for synthetic aperture radar[C].Proceedings 1999 IEEE Radar Conference,Waltham,US,1999: 60-65.
[8]John Jr.C K.Motion compensation for synthetic aperture radar[J].IEEE Transaction on Aerospace and Electronic Systems,1975,11(3): 338-348.
[9]Meng Da-di,Hu Dong-hui,and Ding Chi-biao.A new approachto airborne high resolution SAR motion compensation for large trajectory deviations[J].Chinese Journal of Electronics,2012,21(4): 764-769.
[10]Liu Bin,Wang Kai-zhi,Liu Xing-zhao,et al..An efficient signal processor of synthetic aperture radar based on GPU[C].European Conference on Synthetic Aperture Radar,Eurogress,Aachen,Germany,June 2010: 1054-1057.
[11]Ning Xia,Yeh Chun-mao,Zhou Bin,et al..Multiple- GPU accelerated range-Doppler algorithm for synthetic aperture radar imaging[C].IEEE International Radar Conference,Kansas City,MO,USA,May 2011: 698-701.
[12]Clemente C,Bisceglie M D,Santo M D,et al..Processing of synthetic aperture radar data with GPGPU[C].IEEE Workshop on Signal Processing Systems,Tampere,Finland,Oct.2009: 309-314.
[13]俞惊雷,柳彬,王开志,等.一种基于 GPU 的高效合成孔径雷达信号处理器[J].信息与电子工程,2010,8(4): 415-418.Yu J L,Liu B,Wang K Z,et al..A highly efficient GPU-based signal processor of Synthetic Aperture Radar[J].Information and Electronic Engineering,2010,8(4): 415-418.
[14]NVIDIA.Optimizing matrix transpose in CUDA[OL].http://www.cs.colostate.edu/~cs675/matrixtranspose.pdf,May 2013.
[15]NVIDIA.Profiler user’s guide[OL].http://docs.nvidia.com/cuda/pdf/CUDA_Profiler_Users_Guide.pdf,July 2013.作者简介
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
房地产导刊(2022年4期)2022-04-19
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
幼儿园(2021年12期)2021-11-06
曲阜师范大学学报(自然科学版)(2021年3期)2021-08-26
建材发展导向(2021年12期)2021-07-22
新生代(2019年10期)2019-10-18
电子制作(2017年20期)2017-04-26
火控雷达技术(2016年2期)2016-02-06
