
车辆起步过程神经网络PID控制研究
2013-10-15 06:10刘奇芳卢晓晖
吉林大学学报(信息科学版) 2013年4期
高 原, 刘奇芳, 卢晓晖, 陈 虹
(吉林大学 a. 汽车仿真与控制国家重点实验室; b. 通信工程学院, 长春 130022)
0 引 言
起步是驾驶汽车的基本和关键, 但由于车辆起步时不仅要对车况、 路况做出准确判断, 还要减小离合器磨损、 保证发动机不能熄火等[1], 这使车辆的起步控制成为一种基本却并不简单的事。并且在越来越拥挤的道路状况下汽车的起停变的越来越频繁, 这对于重型汽车极其不利。不同于小型汽车, 重型汽车在起步时, 如控制不当, 不仅会增加燃料消耗, 而且会引起较大的起步冲击甚至是起步失败。因此, 对于车辆起步过程的控制显得尤为重要。
国内外对车辆起步控制的研究也越来越多。目前起步过程中离合器的控制主要分为两类: 起步离合器的位置控制和起步离合器的速度控制。
针对起步离合器的位置控制, 文献[2,3]研究了干式离合器的混合优化控制, 建立了基于模型预测控制策略(MPC: Model Predictive Control)的控制器并与基于线性二次型(LQ: Linear Quadratic)的控制器进行了性能比较; 文献[4]设计了一种非线性前馈和反馈控制器, 实现对离合器位置的跟踪; 文献[5]设计了AMT(Automatic Manual Transmission)车辆在起步过程中的非线性控制器, 并利用PD控制器修正了离合器实际位置与目标位置的偏差; 文献[6-8]对驾驶起步意图做了详细的研究, 通过对起步意图的辨别确定离合器的接合位置以及接合速度。
针对起步离合器的速度控制, 文献[9-11]研究了重型汽车起步离合器的最优控制, 运用最优控制策略保证乘坐的舒适性和较小的元件磨损; 文献[12,13]研究了以维持起步过程中发动机转速恒定为原则的离合器接合控制, 根据不同的油门开度制定不同的目标转速, 通过控制离合器的接合量与接合速度修正实际转速与目标转速的偏差; 文献[14]运用神经网络控制的自适应性解决了模糊控制器在模糊化过程中人为因素影响较大、 获得合理控制参数难的问题, 并利用模糊控制对车辆起步离合器接合速度进行了控制; 文献[15]利用神经网络训练数据建立了发动机的数学模型, 并基于补偿神经网络以油门开度及其变化率作为控制系统的输入, 针对装备有双离合器自动变速器的车辆起步进行了控制。
以上对车辆起步过程的控制方法大都基于数学模型, 而车辆的传动系是高度非线性的, 因此很难在车辆实际起步过程中得到预期的控制效果。常规的PID(Proportion Integration Differentiation) 控制模型虽具有控制准确度高、 实时响应快等优点, 但该类控制算法在鲁棒性、 收敛性等方面较差[16], 笔者采用神经网络PID对车辆起步过程的转速进行跟踪控制, 既保留了PID结构简单的特点, 同时又增强了控制器的自适应性。
1 AMT车辆起步控制需求
AMT车辆的起步过程控制实际上是对离合器接合过程的控制。车辆起步离合器的接合过程可分为3个阶段。1) 消除空行程阶段。这一阶段离合器主从动部分没有接触, 只是在夹紧力的作用下相互靠近, 消除主从动部分的间隙。2) 滑摩阶段。这一阶段离合器的主动部分和从动部分开始接触摩擦, 并通过滑摩将发动机输出的转速和力矩传递给变速箱以及传动系的后续部分。3) 转速同步阶段。这一阶段离合器的主动与从动部分转速相同, 离合器完全接合。
在整个起步过程中, 第1阶段不需要太复杂的控制方法, 只需将离合器的主从动部分快速靠近即可; 第3阶段因为已达到转速同步, 没有转速差的存在, 所以只要给定一个较大的夹紧力, 防止主从动部分在起步过程因不可预知的震动导致脱开即可; 第2阶段与其他阶段有所不同, 在这一阶段离合器接合过快会产生较大的起步冲击, 影响乘坐的舒适性; 接合过慢虽然能确保舒适性, 却会增加离合器的机械磨损。因此这一阶段是笔者研究的重点。
AMT车辆在起步过程中离合器可看成带有摩擦阻尼的刚性元件(见图1)。

图1 AMT车辆离合器模型
其动力学模型为

(1)
(2)
其中ωe为发动机的转速,ωc是离合器从动盘的转速,Te是发动机的输出扭矩,Tc是离合器的摩擦转矩,Tv为阻力矩,Ce和Cv为阻尼系数,Je和Jv是发动机和车辆的转动惯量。
对AMT车辆起步的一般要求是: 要充分体现驾驶员的起步意图, 以满足车辆动力性的要求; 起步过程应平稳、 冲击小, 以减少传动系的冲击和保证乘坐的舒适性; 起步要迅速、 时间短, 以减少离合器的滑摩时间, 提高离合器的使用寿命; 具有适应离合器、 发动机参数变化以及外部行驶环境变化的能力。
2 控制器设计
针对车辆这样一个高度非线性、 不确定性的系统, 笔者选取神经网络PID作为控制器, 以离合器主动部分与从动部分的转速差作为控制器的输入, 离合器的夹紧力作为控制器的输出。此外, 发动机的转速由节气门开度决定。
神经网络PID就是将PID控制器的控制规律融合到神经网络, 使神经网络输出可等效成PID控制器输出的控制方法。神经网络PID是具有非线性特性的3层结构的前馈神经网络, 之所以被称为神经网络PID, 是因为神经网络PID的隐含层各神经元依次与PID控制器的比例环节、 积分环节和微分环节相对应, 因此, 是一种动态的前馈网络, 并且采用了反向传播的学习方法, 即BP(Back Propagation)学习算法[17]。在使用PID控制器对系统控制时, 选取适当的比例、 积分和微分系数是获得良好的控制效果的关键, 盲目地从众多的组合中找到最佳的组合往往难度较大, 因此, 可以利用神经网络自身的特性和结构, 通过适当的学习和训练算法对PID控制器的参数进行在线整定, 使PID控制器达到最佳的控制效果。

图2 神经网络PID控制器结构图
笔者通过第1节对起步离合器接合过程的动力学分析, 选取神经网络PID的结构如图2所示。
笔者设计的神经网络PID共有3层, 依次为输入层, 隐含层和输出层。其中输入层含有2个节点, 隐含层含有2个节点, 输出层含有1个节点。r和y为控制器输入,u为控制器输出;ωij表示输入层第i个神经元到隐含层第j个神经元的权值,ωj表示隐含层第j个神经元到输出层神经元的权值。
1) 输入层神经元的输入和输出。设神经网络PID的输入为[r(k),y(k)]T, 输入层各神经元的输出与输入相等, 即为网络的输入r(k),y(k)。其中r(k)表示系统的期望参考量,y(k)表示被控对象的实际输出量。
2) 隐含层神经元的输入和输出。隐含层第j个神经元的输入为
Ij(k)=ω1jr(k)+ω2jy(k)j=1,2
(3)
比例神经元的输出
(4)
积分神经元的输出
(5)
3) 输出层神经元的输入和输出。输出层神经元的输入与输出相等, 即为各隐含层神经元输出的加权和
(6)
4) PID神经网络的学习算法。将所设计的PID神经网络控制器与被控对象一起作为广义网络, 然后采用BP学习算法进行在线训练, 目的是希望如下的准则函数在要求的范围之内。由于采用在线训练, 所以准则函数为
(7)
PID神经网络各层间权值的调整如下。
经k步训练后, 隐含层到输出层的权值调整算法为
(8)
其中η1表示学习速率。得出
(9)
(10)
(11)
所以, 隐含层到输出层的权值调整为
ωj(k+1)=ωj(k)-η1δ′(k)Oj(k)
(12)
其中

(13)
经k步训练后, 输入层到隐含层的权值调整算法如下
(14)
其中η2为学习速率。类似地, 可推导出
ωij(k+1)=ωij(k)-η2δi(k)Oi(k)
(15)
其中

(16)
(17)
综上所述, 神经网络PID控制器的参数整定方法和控制器的主要工作流程如下:
1)k=1时, 给定各层间权值的初值ωij(0)和ωj(0), 选定学习速率η1和η2;
2) 对系统给定的参考值和输出值进行采样得出r(k)和y(k), 并由此计算系统偏差e(k);
3) 计算PID神经网络中各层节点的输入和输出, 网络的输出就是神经网络PID控制器作用到系统的控制量;
4) PID神经网络通过学习对各层权值ωij(k)和ωj(k)进行在线调整, 以此实现PID控制器参数的自适应调整;
5)k=k+1, 并重复进行步骤2)~4)。
3 仿真验证
3.1 仿真模型的建立
为验证控制器的有效性, 笔者运用AMESim商用仿真软件, 建立了装配有AMT自动变速器的中型卡车的整车模型, 由发动机、 离合器、 变速器、 万向传动装置、 主减速器、 差速器以及半轴组成。
1) 发动机。忽略发动机内部的燃烧, 将其考虑为一个集中参数模型, 发动机输出扭矩计算如下
(18)

2) 离合器。将离合器考虑为一个旋转摩擦扭矩发生器。同时考虑其受到的库伦摩擦力, 离合器输出扭矩可以计算为
Tc=FcμdRcsign(Δω)
(19)
其中Fc是离合器的夹紧力,μd是动态摩擦系数,Rc是作用半径, Δω是离合器主从动部分的转速差。
3) 变速器。AMT是有级变速器, 采用齿轮结构, 这里忽略齿轮间隙造成的影响, 传动比由齿轮的半径比决定, 并考虑了存在摩擦的同步器模型和直连轴。在实际情况中, 汽车的起步过程是不需要变速器参与的, 但为使仿真效果与实际相近, 笔者对变速器模型也做出相应的设计。
4) 驱动轴。驱动轴模型采用旋转阻尼器模型。驱动轴上的输出力矩为
(20)
该模型的阻尼和刚度分别为Cs和Ks, 作为实参输入, 刚度必须为正值, 阻尼为非负值, Δωs是驱动轴两端转速差。
5) 轮胎。笔者选取的轮胎模型为Pacejka模型, 其纵向轮胎作用力可计算为
(21)
(22)
其中Sx为纵向滑移率,ωω为驱动车轮转速,V为车体纵向运动速度,Fxmax是最大纵向作用力, dSx为最大纵向作用力下的纵向滑移率,Rω是轮胎半径。
6) 行驶阻力。车辆在行驶过程中受到的阻力有空气阻力, 坡路阻力和滚动阻力, 其行驶阻力分别为
其中Fw是车辆所受阻力的总和,FG是坡路阻力,FA是空气阻力,FR是滚动阻力,ρ是空气密度,CD空气阻力系数,AA迎风面积,V是车速,m是车体质量,θg是道路坡度,cr1和cr2与轮胎型号和胎压有关。车辆主要仿真参数如表1所示, 车辆仿真模型如图3所示。

表1 车辆名义仿真模型主要参数

图3 AMT整车仿真模型
3.2 不同工况的仿真验证
为验证笔者设计控制器的有效性, 下面给出了多种工况下神经网络PID和传统PID的对比实验结果。
图4是初始节气门开度为20%, 车体质量为6 000 kg时获得的离合器主动部分与从动部分转速仿真曲线。该工况为正常起步, 实线为神经网络PID仿真曲线, 虚线为传统PID仿真曲线。从图4中可以看出, 神经网络PID的控制效果略优于传统PID的效果。
图5是初始节气门开度为30%, 车体质量为6 000 kg时获得的离合器主动部分与从动部分转速仿真曲线。该工况为急起步, 在该种工况下神经网络PID与传统PID的控制效果差异已经较为明显, 因为神经网络PID具有自适应性, 所以在急起步条件下很好地完成了起步离合器的接合, 而传统PID由于不具有自适应性导致起步失败, 即离合器从动部分转速没有跟踪上主动部分转速。

图4 工况1下离合器接合转速仿真曲线 图5 工况2下离合器接合转速仿真曲线
图6是初始节气门开度为20%, 车体质量为8 000 kg时获得的离合器主动部分与从动部分转速仿真曲线。该工况为载重起步, 在该种工况下神经网络PID与传统PID的控制效果相近, 但在传统PID控制下的发动机最低转速低于55 rad/s, 即发动机由于接合过快导致熄火, 而在神经网络PID控制下的发动机转速始终大于55 rad/s, 因此在该种工况神经网络PID的控制效果优于传统PID的控制效果。
图7是初始节气门开度为20%, 车体质量为6 000 kg, 道路坡度为4.05°时获得的离合器主动部分与从动部分转速仿真曲线。该工况为坡路起步, 在该种工况下神经网络PID仍然将起步时间控制在2 s之内, 而传统PID完成起步的时间在2.9 s左右, 并且转速同步时发动机转速已经达到340 rad/s, 这样不仅使滑摩功增加, 很可能导致离合器完全损毁。因此, 在该种工况神经网络PID的控制效果同样优于传统PID的控制效果。
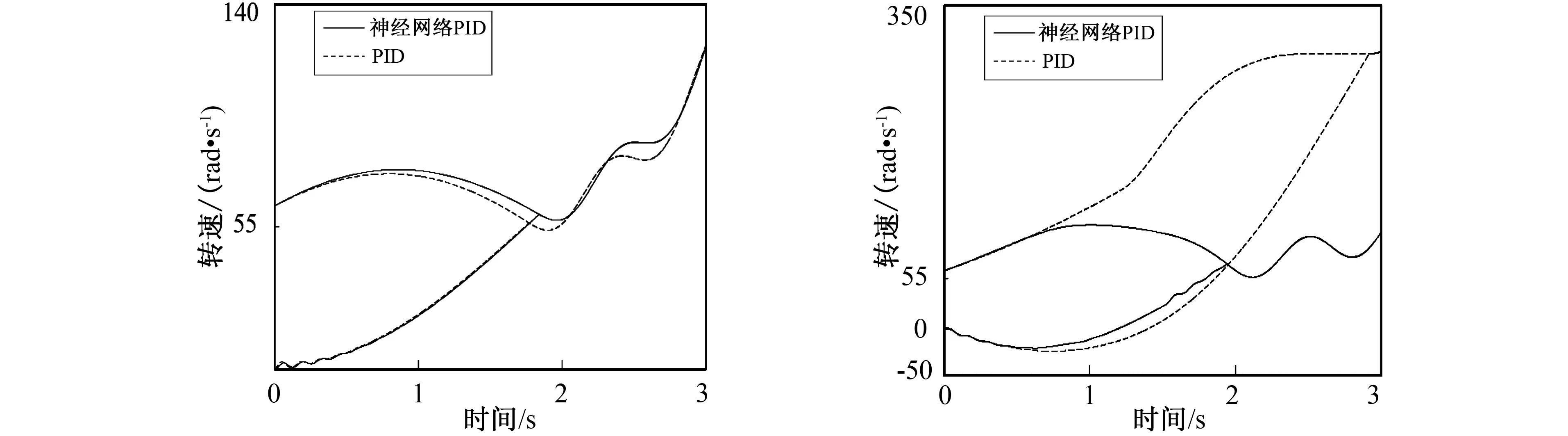
图6 工况3下离合器接合转速仿真曲线 图7 工况4下离合器接合转速仿真曲线
4 结 语
笔者通过设计神经网络PID控制器对AMT车辆起步离合器接合过程进行控制, 仿真实验验证了神经网络PID可以很好地完成起步离合器的接合控制, 获得了良好的控制效果, 并且由于神经网络控制具有自适应性, 所以在变工况下也能得到较满意的控制效果, 在实际起步过程中不会由于随机因素导致车辆起步性能下降。
神经网络PID较传统PID待整定参数有所增加, 但与其他复杂的算法相比, 参数选取难度仍然较小, 并且整定方法与传统PID类似, 故在实际生产生活中已有大量经验可以借鉴, 因此, 神经网络PID在车辆起步控制中具有良好的应用前景。
参考文献:
[1]黄建明, 曹长修, 苏玉刚. 汽车起步过程的离合器控制 [J]. 重庆大学学报: 自然科学版, 2005, 28(3): 91-94.
HUANG Jian-ming, CAO Chang-xiu, SU Yu-gang. Clutch Control for Automotive Start-up Process [J]. Journal of Chongqing University: Natural Science Edition, 2005, 28(3): 91-94.
[2]HEIJDEN A, SERRARENS A, CAMLIBEL M, et al. Hybrid Optimal Control of Dry Clutch Engagement [J]. International Journal of Control, 2007, 80(11): 1717-1728.
[3]BERKEL K, HOFMAN T, VROEMEN B, et al. Optimal Control of a Mechanical Hybrid Powertrain, Vehicular Technology [J]. IEEE Transactions on, 2012, 61(2): 485-497.
[4]DOLCINI P, CARLOS C, BECHART H. Lurch Avoidance Strategy and Its Implementation in AMT Vehicles [J]. Mechatronics, 2008, 18(5): 289-300.
[5]孙冬野, 顾永明, 秦大同, 等. 非线性控制方法在AMT起步控制中的应用 [J]. 重庆大学学报: 自然科学版, 2007, 30(10): 10-14.
SUN Dong-ye, GU Yong-ming, QIN Da-tong, et al. Application of Non-Linear Control Method in AMT Start-up Process [J]. Journal of Chongqing University: Natural Science Edition, 2007, 30(10): 10-14.
[6]王旭东, 谢先平, 吴晓刚, 等. 自动离合器起步模糊控制 [J]. 农业机械学报, 2008, 39(12): 18-22.
WANG Xu-dong, XIE Xian-ping, WU Xiao-gang, et al. Fuzzy Control of Automatic Clutch during Starting Process [J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(12): 18-22.
[7]刘东, 宋健, 李磊. AMT产品起步控制策略的研究 [J]. 车辆与动力技术, 2008, 109(1): 5-8.
LIU Dong, SONG Jian, LI Lei. Research on AMT System Starting Control Strategy [J]. Vehicle & Power Technology, 2008, 109(1): 5-8.
[8]刘帅, 吴训成, 常小刚. AMT车辆起步过程离合器接合控制方法 [J]. 上海工程技术大学学报, 2012, 26(4): 326-331.
LIU Shuai, WU Xun-cheng, CHANG Xiao-gang. Clutch Engagement Control Method of AMT Vehicle Starting Process [J]. Journal of Shanghai University of Engineering Science, 2012, 26(4): 326-331.
[9] 陈清洪, 秦大同, 叶心. AMT重型汽车起步离合器最优控制 [J]. 中国公路学报, 2010, 23(1): 116-121.
CHEN Qing-hong, QIN Da-tong, YE Xin. Optimal Control about AMT Heavy-Duty Truck Starting Clutch [J]. China Journal of Highway and Transport, 2010, 23(1): 116-121.
[10]秦大同, 陈清洪. 基于最优控制的AMT/DCT离合器通用起步控制 [J]. 机械工程学报, 2011, 47(12): 85-91.
QIN Da-tong, CHEN Qing-hong. Universal Clutch Starting Control of AMT/DCT Automatic Transmission Based on Optimal Control [J]. Journal of Mechanical Engineering, 2011, 47(12): 85-91.
[11]齐占宁, 陈全世, 葛安林. 基于遗传算法的AMT车辆起步模糊控制 [J]. 机械工程学报, 2001, 37(4): 8-11.
QI Zhan-ning, CHEN Quan-shi, GE An-lin. Fuzzy Control of the AMT Vehicle’s Starting Process Based on Genetic Algorithm [J]. Journal of Mechanical Engineering, 2001, 37(4): 8-11.
[12]马景龙. 重型AMT汽车发动机转速控制系统研究 [D]. 重庆: 重庆大学机械工程学院, 2007.
MA Jing-long. Study on the Diesel Engine Speed Control System for Heavy Truck with AMT [D]. Chongqing: College of Mechanical Engineering, Chongqing University, 2007.
[13]刁志辉, 田晋跃. 离合器起步过程的控制策略 [J]. 机械设计与制造, 2012(7): 171-173.
DIAO Zhi-hui, TIAN Jin-yue. Control Strategy of Clutch Starting Engagement [J]. Machinery Design & Manufacture, 2012(7): 171-173.
[14]陈然, 孙冬野. 自动变速车辆起步模糊神经网络控制策略仿真 [J]. 系统仿真学报, 2010, 22(4): 912-914.
CHEN Ran, SUN Dong-ye. Fuzzy Neural Network Control of Automated Mechanical Transmission During Starting [J]. Journal of System Simulation, 2010, 22(4): 912-914.
[15]孙贤安, 吴光强. 基于补偿模糊神经网络的汽车双离合器式自动变速器起步控制策略研究 [J]. 汽车技术, 2011(5): 5-10.
SUN Xian-an, WU Guang-qiang. Research on Start Control Strategy for Automotive Dual Clutch Transmission Based on Compensation Fuzzy Neural Network [J]. Automobile Technology, 2011(5): 5-10.
[16]任敏, 王明芳, 任英. 模糊神经网络PID控制器在污水处理中的应用 [J]. 吉林大学学报: 信息科学版, 2011, 29(6): 595-599.
REN Min, WANG Ming-fang, REN Ying. Application of Fuzzy Neural Network PID Controller in Sewage Treatment [J]. Journal of Jilin University: Information Science Edition, 2011, 29(6): 595-599.
[17]徐丽娜. 神经网络控制 [M]. 3版. 北京: 电子工业出版社, 2009.
XU Li-na. Neural Network Control [M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2009.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
江苏通信(2018年4期)2018-12-04
现代装饰(2018年5期)2018-05-26
自动化学报(2017年7期)2017-04-18
汽车维修技师(2017年9期)2017-02-04
中国生化药物杂志(2015年4期)2015-07-07
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
弹箭与制导学报(2015年1期)2015-03-11
