
近海GPS-GPRS漂流轨迹观测系统及应用*
2013-10-16 03:44毛新燕江文胜吴则举
中国海洋大学学报(自然科学版) 2013年9期
毛新燕,赵 亮,2,徐 鹏,江文胜,2,张 平,2,吴则举
(1.中国海洋大学海洋环境学院,山东 青岛266100;2.中国海洋大学物理海洋教育部重点实验室,山东 青岛266100;3.青岛理工大学通信与电子工程学院,山东 青岛266520)
海流是海水中各种物质输运的重要方式,与温、盐同为海洋学基本观测物理量,用于描述一个海区的水文背景场。针对海流的现场观测,多采用的是欧拉方式,即在研究区域利用流速剖面仪等进行走航式或者锚碇式测流,例如 Yanagi等[1],袁耀初等[2],张志欣等[3],Chen等[4]的工作;或是利用高频地波雷达测得表层海流矢量场的分布及变化[5-7]。随着卫星定位技术的发展,采用拉格朗日方式进行观测的研究报道日渐增多。卫星跟踪浮标,包括各种表面漂流浮标及Argo剖面浮标,已被广泛应用于大洋及陆架海环流研究中。与欧拉观测相比,这种跟踪观测方式更符合人们对物质运移的直观理解。于非等[8]、贺志刚等[9]利用Argos漂流浮标数据分别探讨了黑潮水在东海陆架的入侵以及南海涡旋结构。周慧等[10]、黄志达等[11]则利用Argo剖面浮标资料对棉兰老岛以东海域的中层环流结构及吕宋海峡一断面处的水文特征进行了深入分析。
上述卫星跟踪浮标观测开拓了人们的研究思路,提供了研究深海环流的独特视角。而在潮运动占优的近海区域,受到不规则岸线和复杂地形的限制、频繁人类活动的影响,卫星跟踪浮标因其成本较高,难以广泛应用。而同时,在此海域由于大众通信网络的覆盖,一些灵活小巧、成本低廉的近海用小型漂流浮标逐渐发展起来。Ohlmann等[12]利用 GPS-Cellular技术开发了一种近海浮标观测系统“Microstar”。Microstar浮标体与主机服务器间通过Mobitex网络进行定位信息传输,大大降低了通讯费用(传输间隔取1min,则浮标每月的通讯费用由卫星方式的$300降至移动网络方式的$15)。在国内,这种GPS/GPRS浮标技术已应用到河流水面流速、流向的测量工作中,既提高了测量精度,又减轻了工人的劳动强度[13]。本文介绍一种基于GPS-GPRS技术的近海用漂流轨迹观测系统,包括其基本原理、实验室测试结果、现场布放过程及结果等。
1 近海GPS-GPRS漂流轨迹观测系统的工作原理
图1是该观测系统的基本架构图,主要部分为一漂流瓶体,包含微控制器(MCU)、定位接收装置(GPS)、移动通信装置(GPRS)、镍镉电池等。其中主控MCU采用 ARM 32位的CortexTM-M3CPU,它通过RS-232接口分别和GPRS模块和GPRS模块相连,通过I2C协议与外部存储器相连;GPS模块采用Skylab SKG16A,是一款完整的GPS模块,具有高灵敏度、低功耗、小型化、其极高追踪灵敏度(-165dBm)扩大了其定位的覆盖面,在普通GPS接收模块不能定位的地方,如狭窄都市天空下、密集的丛林环境,SKG16A都能高精度定位;GPRS模块采用SIMCOM-900,它采用工业标准接口,工作频率为 GSM/GPRS 850/900/1800/1900MHz,可以低功耗实现语音、SMS、数据和传真信息的传输。
观测系统的工作流程如下:漂流瓶体在GSM网络覆盖的海区释放后随流运动,每隔预设时刻t1,瓶体接收GPS定位信息,并缓存于微控制器中,而后休眠至下一工作时刻。经过预设的t2时间间隔(t2=n·t1,n为正整数,一般取3~5),瓶体通过GPRS装置将n次定位信息上传至数据服务器,在收到服务器的确认指令后,再将微控制器中的缓存数据清空,完成一次整体工作循环。研究人员可由客户端登录到服务器,通过软件界面查看瓶体的状态信息:每个瓶体各时刻的位置、剩余电量等(见图2)。考虑到瓶体在水中需保持直立姿态,在内部配重了水泥,并将各主要工作元件安装在支架上,以确保定位和移动通信装置的天线高于水面(见图3)。漂流瓶内的大功率镍镉电池,理论上可持续工作10d,满足低于潮频的近海时均环流研究条件。

该GPS-GPRS漂流轨迹观测系统的突出优点是浅海适用性、数据实时性及瓶体的可回收利用性。在GPS导航、手机GPRS上网已普及的现代社会,基于这2项技术的系统开发成本十分低廉,便于批量应用、获取大量实测数据,进而推动近海环流研究工作的开展。
2 漂流瓶体测试
2.1 GPS定位精度
为测试GPS-GPRS漂流瓶体的定位精度,将30个瓶体集中同一处(范围不超过5m)静置24h。设每5min(t1)获取一次 GPS定位信息,每15min(t2)上传信息至服务器,24h内每瓶体约上报250组数据。统计结果显示,各瓶体定位的标准偏差范围为29.6~51.8m,30个瓶体的总体定位标准误差为42.4m。
2.2 随水运动性
拉格朗日观测的前提假设是浮标的运动能够体现流体微团的运动,这就要求浮标体具有良好的随水运动性。利用中国海洋大学海洋学实验教学中心的风浪流水槽,制造出不同强度的流动,配合以不同大小的风速(风、流取同向),而后再对水槽背景流速及漂流瓶体的运动速度进行多组测定,最终给出可靠的随水性测试结果。
风浪流水槽工作段长度为10m,槽中水深70cm左右。在无风的情况下,背景流场可视为均匀流动,使用SLC9-2型直读式海流计(精度1.0cm/s)读取中层流速,与漂流瓶运动速度作比较;在有风的情形下,则将直读式海流计提升至水面下15cm处,测得近表层的背景流速值。由于在水槽无法通过GPS定位方式追踪得到漂流瓶体的运动轨迹,所以采用传统的“秒表计时再计算”的方法得到瓶体运动速度:即通过记录瓶体运动相同距离(6m)的时间来确定。每种流、风组合下,进行5组试验,结果见表1。

表1 GPS-GPRS漂流瓶随水性测试结果(室内)Table 1 Laboratory tests of water-following property for the GPS-GPRS drifter bottle
结果显示:在无风条件下,背景流速越大,瓶体的随水运动性越好,这是因为瓶体是具有质量及惯性,水流只有达到一定速度,才能带动瓶体运动。随着风速的增大,瓶体受风拖曳的作用明显加强,随流误差也逐渐增大。该误差除了与风有关,也源于实验条件自身,风浪流水槽长度很有限,瓶体在其中的运动至多花费1min,时间较短,测量误差不可忽略。此外,水槽宽度仅为1m,在壁边界的侧摩擦作用下,瓶体所接触水流存在一定的横向剪切,使得瓶体运动有向壁分量,这也会导致瓶体速度与背景流速的差异产生。总之,该室内随水性测试实验给予作者的启示在于:当在现场进行布放漂流瓶观测时,要尽可能选取风浪较小、空间开阔的时机及区域,以确保瓶体运动具有水团标识性。
3 现场应用
通过前期测试,对GPS-GPRS漂流瓶体的定位精度及观测适用条件有了基本认识,现场应用测试则是检验该观测系统可靠性的核心环节。2011年9月14日在浙江象山港峡湾内段进行了近海GPS-GPRS漂流轨迹观测系统的首次海上布放试验。选取象山港作为实验海域(图4),有如下原因:首先,象山港地处浙江中部沿海,半日潮占优,属于典型的的浅海动力环境;其次,港区呈东北—西南走向,是一个伸入陆地的狭长型海湾,移动通讯网络覆盖全面,有利于漂流瓶体的追踪及回收;第三,象山港周围由山地、丘陵环绕,是我国著名的避风良港,湾内风平浪静,其自然海况适于GPS-GPRS漂流瓶体的现场布放。
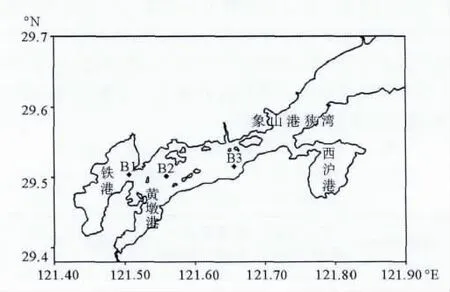
图4 2011年9月象山港内段观测站位图,三站水深约15mFig.4 Mooring stations(three red diamonds)in Xiangshan Bay(Sept.2011)with depth of 15m
上图给出了象山港海区的岸线及本次拉格朗日-欧拉联合观测的3个站位B1,B2,B3。具体观测过程如下:9月14日12:00~21:00,每3h(即高平、落急、低停、涨急时刻),由B1、B2站各释放一组GPS-GPRS表层漂流瓶体,每组3瓶,4时次共释放24瓶。这样布放,既能提高获取有效数据的概率,又能对比分析同组瓶体的轨迹结果。除上述拉格朗日观测部分外,在三站还配合进行周日锚系观测:在海床基四脚架上,利用RDI-600K声学多普勒流速剖面仪(ADCP)仰视工作测得流速的垂直剖面。观测时正逢农历八月十六天文大潮期间,潮流速度较大,B1站海床基架子被走锚渔船拖倒,最终只获得B2、B3两站9月14日11时~15日12时之间的流速数据。
观测期间天气晴好,海面无风浪,海况良好。大多数漂流瓶体在释放至水中均能正常工作,即能够接收定位信息,并与服务器正常通讯。图5给出了某一时刻在客户端交互界面上显示的各漂流瓶体的位置分布情况,研究人员可据此查询和掌握最近一次上报信息时瓶体所在位置。图6给出的则是某一瓶体在观测期间的所有上报位置,用鼠标点击任一气球标志可显示该处的经、纬度及上报时间等信息,方便人们随时关注瓶体的运动轨迹。
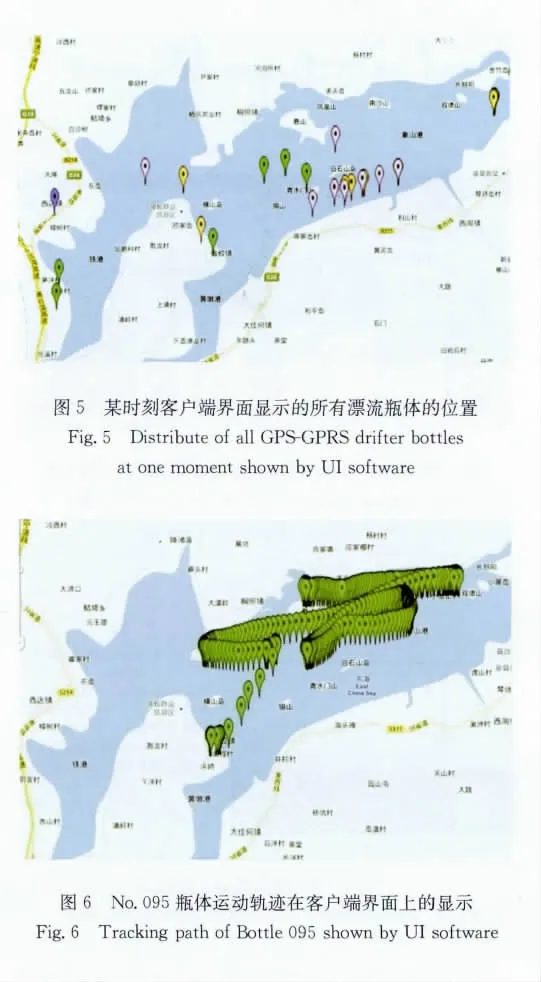
为了尽可能多地获取漂流轨迹观测数据,仅在9月15日中午完成定点观测返航时将沿途遇到的4个瓶体回收,并未依照服务器上储存的定位信息去搜寻所有瓶体。通过查看服务器,发现至9月18日16时,其余20瓶体才停止了运动,停靠在沿岸的不同位置。各瓶体定位数据显示:在此次现场试验中,自释放后正常工作时长大于12.4h(M2分潮周期T)的有16瓶,大于2T(24.8h)有10瓶,其中最长有效数据约2d,近4个半日潮循环。
4 结果讨论
据中国海湾志[14],象山港潮流以往复流为主,潮汐的基本特征为涨落潮不对称:涨潮历时长于落潮历时。选取观测期间9月14日16:00~15日04:30时段的一个涨落潮循环过程,对各瓶体的运动路径进行了分析。发现各瓶体的运动轨迹基本为往复型;涨落潮不对称性集中体现在落潮期间的瓶体运动距离要大于涨潮期间的(见图7)。

结合B2站水位及表层流速的周日变化可知,涨潮阶段的潮流并非匀速增加,而是在低潮时停留3h左右(涨潮流小于0.2m/s),此后迅速涨急并在2h内达到高潮(图8)。对比而言,落潮流速变化则较为均匀,因此尽管落潮历时短、涨潮历时长,但漂流瓶体却是在落潮期间随水运动距离更远些。
此外,将同组漂流瓶体的运动轨迹进行对比可发现,在进入铁港浅水区之后(B1站附近),随着非线性作用加强,高于潮频的小尺度运动愈加频繁,瓶体运动的

随机性也加大(见图9)。在狭湾中段的062、068号及099、100号2组瓶体,运动轨迹几乎是重合的,而铁港内同一组漂流瓶(009、010号)的轨迹仅在涨潮初期差别较小,到落潮阶段轨迹差别较大,甚至出现了反向运动。
在近海环流研究中,滤掉周期性潮流之后的低频运动是关注的重点,流体微团经过一个或多个潮周期的净位移等价于表示环流的拉格朗日余速度。此次现场应用结果显示,由B1站释放的瓶体历经一个M2周期后的净位移大概1.5~2.4km,B2站释放瓶体的净位移则介于4.3~4.6km之间,方向指向湾口。这为同期开展的象山港环流数值模型工作提供了宝贵的定量化观测资料,有助于模拟结果的校验及模型的调校改进。值得一提的是尽管漂流瓶体的定位误差约40m,但相较于环流研究的净位移尺度(此次在象山港的观测结果为数km)来说,该误差为小量,可忽略。
5 结语
本文系统、全面地介绍了一种适于近海使用的基于GPS-GPRS技术的漂流轨迹观测系统,其主要部分为一表层漂流瓶体,能实时GPS定位并通过GPRS上传数据至服务器,瓶体轻便、性能稳定且能够回收并再次使用,性价比高。前期实验室内测试显示漂流瓶体具有良好的随水性;多样本统计其定位误差约为42m。在象山港海域进行的现场释放试验中,有2/3以上的瓶体可正常工作,其运动轨迹符合人们对象山港潮流的一般认识。同时,漂流瓶体在半日潮周期内运动的净位移结果为象山港环流研究积累了量化资料,提高其环流复杂性的认识。该近海GPS-GPRS漂流轨迹观测系统可切实起到辅助环流研究的作用,具有一定科学价值及应用前景。
致谢:感谢中国海洋大学吕红民教授在实验室内漂流瓶随水性测试的大力协助。感谢冯建龙、全祺、杨伟、张晶等在漂流瓶定位精度测量及象山港现场应用过程中的配合与努力。
[1] Yanagi T,Shimizu T,Matsuno T.Baroclinic eddies south of Cheju Island in the East China Sea [J].Journal of Oceanography,1996,52(6):763-769.
[2] 袁耀初,刘勇刚,周明煜,等.1999年6月黄海南部与东海北部的环流 [J].海洋学报,2002,24(s1):20-30.
[3] 张志欣,于非,郭景松,等.南黄海西部夏季流的观测与分析 [J].水动力学研究与进展 A,2008,23(4):404-411.
[4] Chen F,Du Y,Yan L W,et al.Response of upper ocean currents to typhoons at two ADCP moorings west of the Luzon Strait[J].Chinese Journal of Oceanology and Limnology,2010,28(5):1002-1011.
[5] 周浩,文必洋.高频地波雷达生成海洋表面矢量流图 [J].海洋与湖沼,2002,33(1):1-7.
[6] 吴雄斌,杨绍麟,程丰,等.高频地波雷达东海海洋表面矢量流探测试验 [J].地球物理学报,2003,46(3):340-346.
[7] 朱大勇,李立,李炎,等.台湾海峡西南部表层海流季节变化的地波雷达观测 [J].科学通报,2008,53(11):1339-1344.
[8] 于非,臧家业,郭炳火,等.黑潮水入侵东海陆架及陆架环流的若干现象 [J].海洋科学进展,2002,20(3):21-28.
[9] 贺志刚,王东晓,陈举,等.卫星跟踪浮标和卫星遥感海面高度中的南海涡旋结构 [J].热带海洋学报,2001,20(1):27-35.
[10] 周慧,袁东亮,郭佩芳,等.Argo剖面浮标显示的棉兰老岛以东中层环流的中尺度信号特征 [J].中国科学:地球科学,2010,40(1):105-114.
[11] 黄志达,胡建宇.利用Argo浮标资料分析横跨吕宋海峡20.5°N断面的水文特征 [J].台湾海峡,2010,29(4):539-546.
[12] Ohlmann C,White P,Sybrandy A,et al.GPS-Cellular drifter
technology for coastal ocean observing systems [J].Journal of
Atmospheric and Oceanic Technology,2005,22:1381-1388.[13] 钱苏芬,涂瑶,陈先国.GPS/GPRS技术在水面流速、流向测量中的应用[J].中国水运,2011,11:30-31.
[14] 中国海湾志编纂委员会.中国海湾志(第五分册 上海市和浙江省北部海湾)[M].北京:海洋出版社,1992:166-184.
猜你喜欢
大电机技术(2022年3期)2022-08-06
垂钓(2022年3期)2022-05-14
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
粮食问题研究(2022年2期)2022-04-25
垂钓(2022年1期)2022-02-09
成都信息工程大学学报(2021年2期)2021-07-22
舰船电子工程(2021年5期)2021-06-04
大众科学(2020年7期)2020-10-26
垂钓(2019年2期)2019-09-10
