一种改进的粒子滤波算法
2013-10-20 06:58倪春光
舰船科学技术 2013年1期
倪春光
(91388部队,广东 湛江524022)
0 引言
对于非线性系统状态估计问题,当噪声是高斯时,传统的解决方法是扩展卡尔曼滤波 (EKF)和无迹卡尔曼滤波 (UKF)。当噪声是非高斯时,人们提出了粒子滤波 (PF)、无迹粒子滤波 (UPF)等。PF是一种基于蒙特卡罗方法的贝叶斯状态估计算法,通过一组归一化权值的粒子来近似表示后验概率密度,其建议分布是先验概率密度,具有计算简洁的特点,但由于其建议分布没有包含新的测量信息,其粒子的使用效率不高。而UPF采用UKF来计算建议分布,其中UKF对高斯随机变量的均值和方差可以精确到三阶,并结合新的测量信息,可以使建议分布更好地逼近后验概率密度,但是运算量很大。
本文提出一种新的粒子滤波 (MUPF),与传统的UPF相比,它介绍了一种辅助模型并且利用辅助模型和UKF来产生粒子的建议分布,从而提高计算的精确度。
1 粒子滤波
1.1 贝叶斯估计原理
假定动态时变系统可描述为
系统方程:

量测方程:

若已知状态的初始概率密度函数p(x0|y0)=p(x0),则状态预测方程和状态更新方程分别为


其中 p(yk|y0:k-1)=∫p(yk|xk)p(xk|y0:k-1)dxk,由于其积分的复杂贝叶斯递归滤波很难实现,如果系统为高斯线性空间模型,可以通过卡尔曼滤波得到最优的状态估计。对于非高斯非线性系统,如何快速计算积分是研究滤波算法的核心问题。
1.2 粒子滤波算法

当无法从后验分布p(x0:k|y0:k)中直接采样时,可以找一个容易采样的密度分布函数q(x0:k|y0:k)(建议分布)中采样。
令w(x0:k)为重要性权值:

对任何可积函数的期望可以近似为

PF的实现步骤如下:
1)初始化k=0

2)计算重要性权值

粒子权值更新方程:

3)归一化重要性权值

4)重采样
5)返回状态估计值

随着迭代次数的增加,重要性权值的分布变得越来越倾斜,有可能出现粒子匮乏现象,为了避免粒子匮乏,Goden等提出了重采样方法,其主要思想就是去掉那些权值小的粒子,复制权值大的粒子。
2 UPF原理


3 一种新的UPF滤波算法
称式(1)和式(2)为主模型,这里主要介绍一种辅助模型并使用UKF和它共同来产生建议分布。
3.1 辅助模型
定义辅助模型为
其中:mk为一个小方差高斯噪声,观测噪声nk和式 (2)中的vk认为是一样的。如果h(·)是线性的,nk是高斯噪声,卡尔曼滤波就可以对rk进行最优估计。在实际环境中,h(·)往往是非线性的,可以使用UKF来对rk进行估计。
3.2 MUPF算法


MUPF的算法步骤如下:
1)初始化
2)重要性采样
3)重要性权值
当i=2,…,N时,

归一化权值
4)重采样
4 仿真试验
为了证明MUPF的性能,考虑一个非线性非高斯模型。

其中,w=4e-2,uk服从Gamma(3,2)分布,观测噪声vk服从高斯分布N(0,10-5),目标的初始状态x0=1,经过100次蒙特卡罗仿真,每次仿真时间是60 s,采样间隔为1 s。1次独立试验的均方根误差定义为
图1表示MUPF使用20个粒子与其他滤波器对系统的状态估计,图2为采用EKF,UKF,PF,UPF及MUPF滤波算法对状态估计的均方根误差曲线图。
表1给出了粒子数为20的时候,各个滤波器的RMSE。
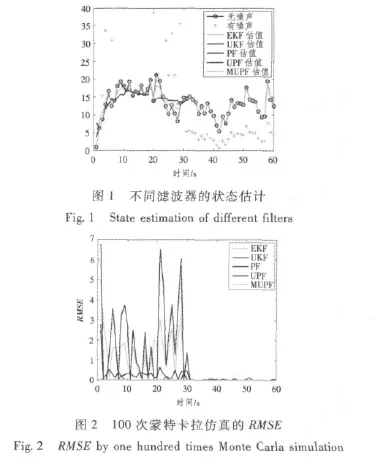

表1 RMSE的均值和方差Tab.1 Mean value and variance of RMSE
5 结语
本文提出了一种新的粒子滤波算法 (MUPF)用来估计非线性非高斯系统的状态。一般情况下,粒子滤波的主要问题是对建议分布的选择,它很大程度上决定着滤波的性能。UPF通过UKF的一步预测来构建建议分布,由于UKF存在缺陷,使得建议分布不能与后验概率密度得到很好的近似。MUPF通过使用辅助模型与UKF来构造建议分布,更好地逼近了后验概率密度。仿真结果表明,新的粒子滤波算法使用很少的粒子就可以达到很高的精度。
[1]ARULAMPALAM M S,MASKELL S,GORDON N.A torial on particle filters for online nonlinear/non-Gaussian Bayesial tracking[J].IEEE Trans,Signal Process,2002,5(2):174-188.
[2]MERWE R V.A Doucet the Unscented Particle Filter A-dvances in neural Information Proceesing Systems[Z].MIT,2000.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
成都信息工程大学学报(2022年3期)2022-07-21
山西大学学报(自然科学版)(2021年4期)2021-08-31
北京航空航天大学学报(2021年7期)2021-08-13
邮电设计技术(2021年2期)2021-03-13
数学大世界(2020年19期)2020-08-05
电子制作(2019年23期)2019-02-23
计算机与数字工程(2018年5期)2018-05-29
计算机测量与控制(2018年3期)2018-03-27
北京航空航天大学学报(2017年9期)2017-12-18