
限流技术在无刷直流电机控制器中的应用
2013-10-21 00:53于波峰赵明镜陈黎娟
电子设计工程 2013年12期
王 琪,于波峰,赵明镜,陈黎娟
(南昌航空大学 江西 南昌 330063)
随着工业技术的发展,集成化已经成为人们对各种产品的一种需求。文中采用的CYPRESS 公司的PSOC 系统可配置单片机具有这方面独到的优势。它以体积小,价格低廉,功能完善和可配置编程的特点大量应用在无刷直流电机控制器中。
文中基于CY8C24533 单片机设计了一款电动车用的无刷直流电机控制器,包括硬件和软件的设计。该芯片是一款专门用来控制优化设计的,特别适合于无刷直流电机的控制,由于该芯片集成了许多无刷直流电机控制的外围电路,具有很高的性价比[1]。其中SAR8 的对齐采样功能在限流工作中发挥了很重要的作用。
1 控制器整体设计
整体系统的作用就是让用户可以通过旋转转把来控制电动自行车的行驶速度,给出刹车信号后自行车减速。单片机接收电动自行车转把给定的速度信号,并根据电流和转速反馈调整输出的PWM 信号的占空比,控制着电机转子的转速[2]。电机内部的霍尔元件在电机转动时输出高低电平信号,将电机转子的当前位置信息反馈给单片机,单片机根据此反馈信号计算出电机的转速同时输出对应的换相信号。驱动电路根据单片机的输出指令控制三相桥功率开关电路上下功率管的导通顺序和导通时间,从而实现对无刷电机的旋转驱动[3]。如图1 所示。
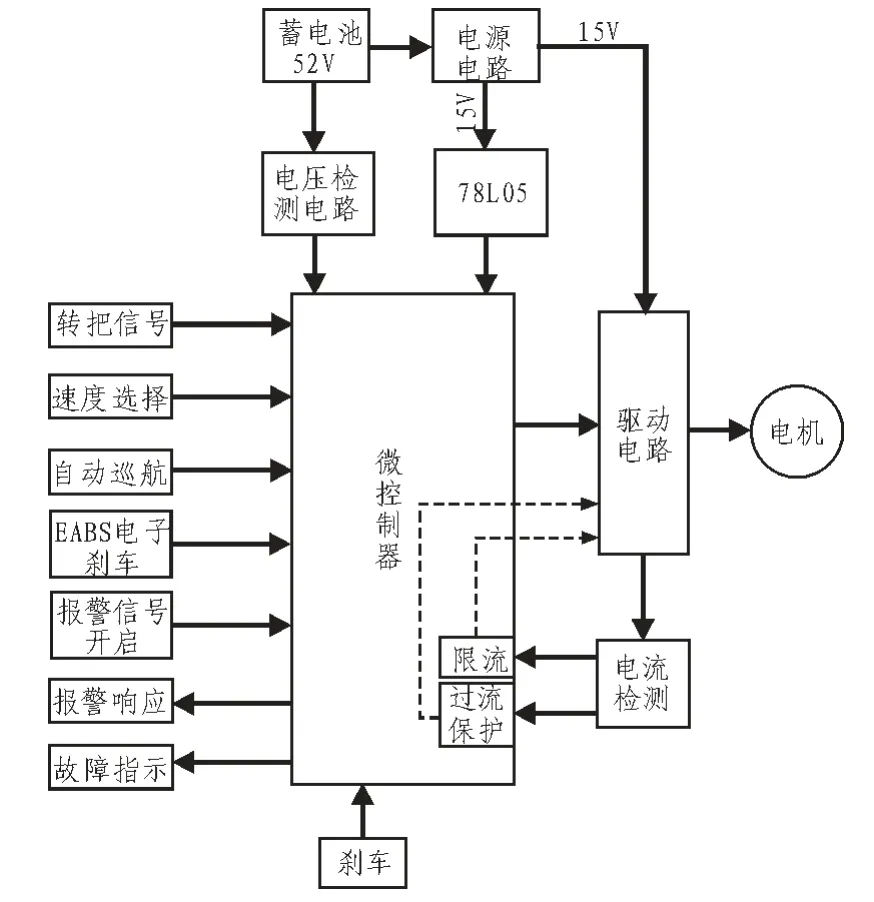
图1 无刷直流电机控制系统框图Fig.1 Structure diagram of the DC motor control system
本课题所设计的无刷直流电机控制器的系统框图。PSoC的输入信号有:转把电压信号、刹车信号、其他信号(三速选择信号、巡航信号、电制动信号、报警器信号、电流信号和电池电压信号)。输出信号有:电机驱动信号,三速指示灯和故障指示灯。系统的电源为锂电池组供电,经过晶体管稳压成15 V 共电机驱动电路用,15 V 经稳压模块78L05 输出5 V电压共测量电路和CY8C24533 所用。
PSoC(Programmable System on Chip)是美国赛普拉斯微系统有限公司推出的新一代功能强大的8 位可配置的嵌入式单片机,它的出现使设计者逐步摆脱了板级电子系统设计方法层次而进入芯片级电子系统设计。PSoC 与传统单片机的根本区别在于其内部集成了数字模块和模拟模块,用户可以根据不同设计要求调用不同的数字和模拟模块,完成芯片内部的功能设计,实现使用一块芯片就可以配置成具有多种不同外围元器件的微控制器,从而建立一种可配置嵌入式微控制器,用以实现从确定系统功能开始,到软/硬件划分,并完成设计的整个过程。Cypress 公司的CY8C24533是一款专门针对电机控制的芯片,它几乎继承了CY8C24XXXA 系列芯片的所有资源,同时针对电机控制扩展了相应的资源和功能,使得CY8C24533 这款PSoC 芯片非常适合作为电动自行车控制器的主控芯片[4]。CY8C24533 的内部结构如图2 所示。

图2 CY8C24533 内部结构图Fig.2 Structure diagram of the CY8C24533
CY8C24533 的模块资源相当的丰富,4个数字模块和4个模拟模块,4个数字模块可以配置成多种用户模块,如定时器、PWM 模块、死区脉宽调制模块、串口模块(UART)、缓冲模块(Digbuf)、SPI 主从通信模块等。四个模拟模块可以配置成多种模拟周边功能,如可编程增益放大器(PGA)、比较器(COMPAR)、模拟快关电容等。模拟模块和数字模块结合的模块有7~14 的增量式模数(AD)转换模块;8~11 位的模数转换模块等。CY8C24533 之所以为电机控制专用芯片,主要是因为其特有的逐次逼近比较模数转换模块SAR8。
2 限流工作的硬件电路设计
由于本文是主要介绍限流工作中逐次逼近比较模数转换模块SAR8 的关键作用,所以只给出了电流采集部分的原理图如图3 所示。其中运放采用LM2904 双运放,其中一个运放单元作为电流采样后的放大使用,另外一个运放单元供其他电路使用。LM2904 运放的工作范围宽,噪声低。Port1 点为驱动电路MOSFET 源极引出节点,这样采样电阻可以以电压的大小来反应出流经驱动电路总电流的大小。Rp1、Rp2为康铜丝,由于在进行电流采样时会在采样电阻上消耗一部分功率,所以在满足测量情况的前提下,选取的电阻值越小越好。本课题中选取的康铜丝阻值为3 毫欧。采样电压经过LM2904 放大后送至CY8C24533 的内部,在MCU 内部供两路使用,一路用于过流保护。另一路信号,经MCU 内部PGA 模块增益放大送至SAR8 模块进行AD 采集。采集后与限流值比较,调整PWM 占空比,使电流限制在一定范围内即限流。由于在无刷直流电机运行中,有时会启动柔性电子刹车功能,会产生反向电流信号,时间大概持续几秒钟,对LM2904 芯片产生很大的损害,所以图3 中所示的同相比例放大电路中在同相端会叠加一个正向电压,即使在康铜丝采样点没有信号时,运放的输出也在0 V 以上。这样可以在很大程度上减少负信号对LM2904 的损害。因本设计用控制器的电流最大可达32 A 左右,康铜丝Rp1、Rp2并联后的电阻阻值为4 毫欧左右,所以康铜丝的两端的最大压差为70 mV 左右。由于最大电流信号和零点信号叠加后大于200 mV,而运放的最大输出电压为(VCC-1.5)V 左右,而本设计用的LM2904 的电源为5 V 供电,所以最大输出电压为3.5 左右,综上参数,LM2904 的放大倍数选择为15 倍左右,即电阻R2和R3的阻值比在1:14 左右。并且要采用精密电阻,保证放大倍数的准确,为了运放输入的平衡还要在同相端加入R1作为平衡电阻,同样采用精密电阻阻值与R2相等。但是需要注意在MOSFET 通断过程中,由于寄生电容等因素的原因,康铜丝端的采样电压信号会有比较大的毛刺,若不进行滤波处理,将对采样的准确性造成严重的影响。如图3 中,由R1和C1构成的低通滤波电路对康铜丝端的采样信号进行了滤波处理。R1和C1的低通滤波电路一方面响应速度要够快,才能及时的滤除干扰信号;另一方面,要设计好截止频率,使无效的高频干扰或者噪声滤除。

图3 电流采集电路Fig.3 Current sampling circuit
CY8C24533 之所以为电机控制专用芯片,主要是因为其特有的逐次逼近比较模数转换模块SAR8,典型的转换时间为2.7 μs。电机控制中的一个关键问题就是对电流的控制,控制电流的前提条件就是快速而准确采集到电流值的大小。传统的采集芯片虽然能够在采样速率上能够满足要求,但是在准确性上就显得力不从心。SAR8 逐次逼近式模数转换模块可以在特定时刻触发ADC 执行模数转换。SAR8 的触发方式有:手动单次触发方式、自由运行方式和自动对齐同步触发方式。自动对齐同步触发方式原理如图4 所示。在该方式下有两条通路:低通路(Low Path)和高通路(High Path)可以实现对齐触发[5]。

图4 SAR8 自动对齐同步触发方式原理图Fig.4 SAR8 Automatic alignment of synchronization trigger mode principle
同步触发方式有两条通道:低通道(Low Path)和高通道(High Path)均可以实现对齐触发。这两条通道均有一个和数字模块的计数值进行比较的8 位寄存器。如果低通道(Low Path)和该计数值比较结果相等时,CMP_LO 输出高电平。如果高通道(High Paht)与该计数值比较结果相等时,则CMP_HI 输出高电平。CMP_LO 和CMP_HI 的输出通过Path Logic 可进行逻辑与或者逻辑或运算,当运算结果为1 时,就触发一次AD 转换。数字模块中的比较值可由用户自行设定。例如,当DBB0 被配置成一个8 位的PWM 发生器时,在PWM 的一个周期内,可以被触发1 次或2 次A/D 转换。当CMP_LO 和CMP_HI 的寄存器中的某一个被启用时,且Path Logic 设置为或运算时,ADC 会被触发一次;当CMP_LO 和CMP_HI 的寄存器被设置成同一个值时,并且Path Logic 设置为与运算时,ADC 会被触发一次;当CMP_LO 和CMP_HI的寄存器被设置成不同的值时,且Path Logic 设置成逻辑或运算时,ADC 会被触发两次。在无刷直流电机的控制中,PWM 的作用在于控制电机的转速,在任意一个PWM 周期中相电流不是恒定不变的,采用自对齐同步触发方式可以在每一个PWM 周期的特定时刻触发AD 采集电机的电流信号,对特定时刻的电流信号进行分析判断是否异常,若异常则通过相应的控制采取相应措施。
3 限流工作的软件设计
无刷直流电机的电流控制能体现无刷直流电机控制系统的好坏[6]。电流的控制关键在于准确和及时。准确、及时正是对电流经过LM2904 放大后由AD 采样的到的值经过处理控制PWM 波形而言的。准确性体现在电流AD 采样和转换的时刻。本课题所使用的PSoC 的AD 模块为SAR8,采用其对齐触发采样的方式。因为以PWM 波驱动的无刷直流电机电流与PWM 波同频率,但相位滞后一定时间的脉动电流波形,合适的采样点在上升沿过后一定时间内。及时主要体现在采样的次数上,因为电流的变化很快,在一个PWM 周期内可能会有很大的起伏,所以最好是一个PWM 周期内采样多次,但是由于SAR8 的采样和转换时间为3.3 μs,单片机的速度受限,且改变PWM 脉宽寄存器的值不会立即改变PWM 占空比,要到下一个PWM 周期开始才改变,所以一个周期采集一次足矣。采集到电流AD 值后,可以根据其值对PWM 脉宽做调节控制,用逐渐增减PWM 脉宽值的方法如图5 所示。采集到的电流AD 值乘以占空比得计算的平均电流值,当平均值大于限流值时,减小PWM 脉宽值,当平均值小于限流值时,不马上恢复原先的PWM 脉宽值,而是有一个环带,当电流值低于环带值时才开始逐渐增加PWM 脉宽值,当恢复到原有值时就停止更新脉宽值。所以用平均值来控制PWM 脉宽值时,当占空比很小时,电流即时值就相当大,所以还需要最大值的控制,当电流及时值大于最大值时,同样执行增减PWM 脉宽值程序代码。当即时值大于过流保护值时,开启过流保护使PWM 脉宽快速减为0,确保MOSFET 的安全。

图5 软件程序流程图Fig.5 Flow chart of the software design
4 实验结果及数据
对控制器性能的测试是在天津科达动力测控技术有限公司生产的通用机台架实验设备(MCT-E2)上进行的,搭配杭州威格智能仪器研究所的测功机软件。可以自动接收仪器测试数据生成excel 表格。如表1 所示为本设计控制器在转速为463 r/min 时,扭矩从0 逐步增加到50 nm 时所测得的数据电机稳定在特定转速时,负载以线性方式逐步增加时,控制器的输入电流跟随负载扭矩的变化也成线性增加。当负载大到一定程度时,电流随负载扭矩的增加而非线性增加。此现象正是本设计中限流子程序中限流算法的体现。限流的作用在于当控制器功率达到一定值时为减少控制器的发热,提高控制器的效率,保证驱动电路MOSFET 工作在安全的环境下而在软件上做的措施。
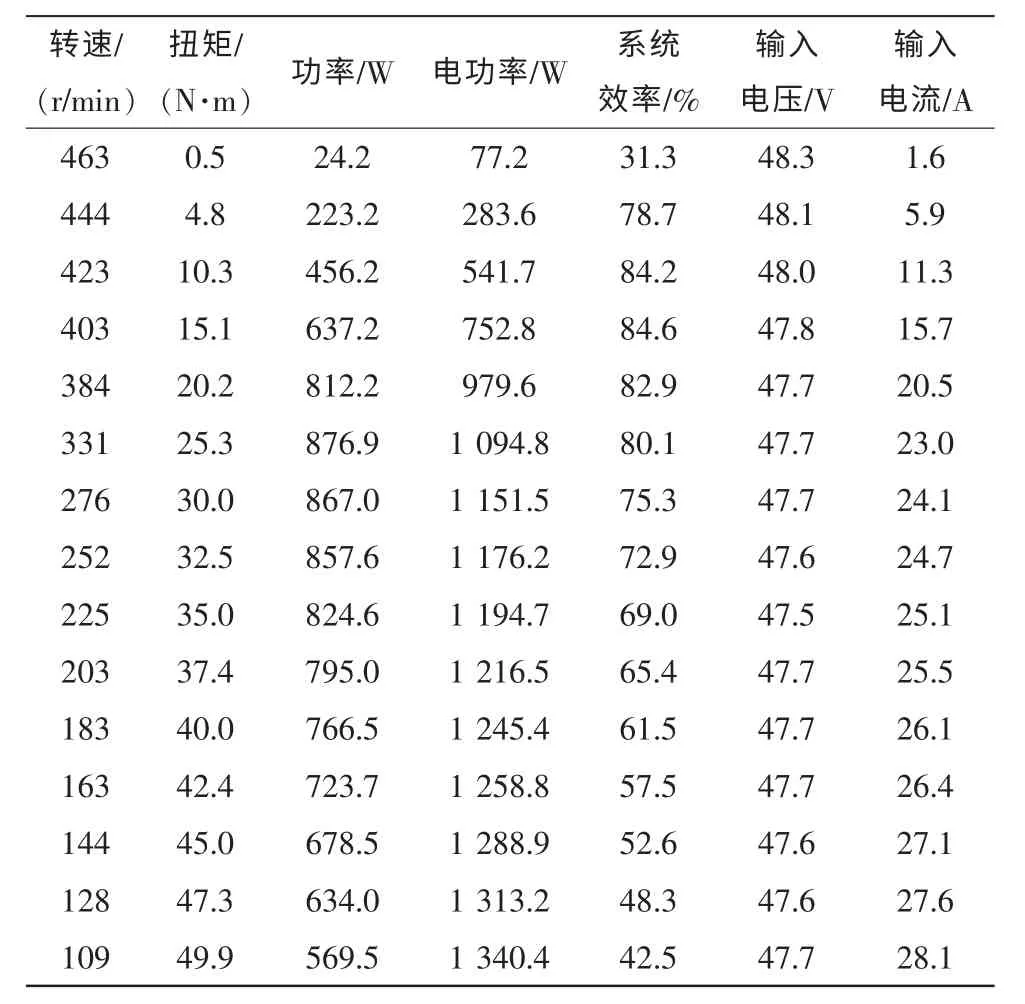
表1 实测数据Tab.1 Observed data
5 结论
文中对于电动车控制器的限流功能,从硬件和软件两个方面进行了介绍,提出了对齐采样方式在限流工作中的关键作用。根据以上关于限流方法的设计以及从得到的实验数据(表1)上分析得带一种比较好的限制控制器电流的方案,充分保证了控制器在电动车运行过程中的安全和带负载的能力。
[1]李胤昌.无刷直流电机控制器及其在电动自行车上应用的研究[D].广州:广东工业大学,2009.
[2]夏长亮.无刷直流电机控制系统[M].科学出版,2009:31.
[3]张琛.直流无刷电动机原理及应用[M].机械工业出版社,1996.
[4]易将能,韩力.电动车驱动电机及其控制技术综述[J].微特电机,2001.YI Jiang-neng,HAN Li.Electric vehicles driving motor and its control technology about[J].micro motor,2001.
[5]余永权,汪明慧,黄英.单片机在控制系统中的应用[M].电子工业出版社,2003.
[6]廖承喜.基于ATmega8单片机的电动自行车控制器的设计[D],湖南大学,2008.
猜你喜欢
电力自动化设备(2022年11期)2022-11-19
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
电气技术(2022年1期)2022-01-26
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
